







自行车模型(Bicycle Model)是一种常见的车辆运动学模型,其基本假设为:
- 不考虑车辆在垂直方向(Z轴方向)的运动
-
假设车辆左右侧轮胎在任意时刻都拥有相同的转向角度和转速;这样车辆的左右两个轮胎的运动可以合并为一个轮胎来描述
-
假设车辆行驶速度变化缓慢,忽略前后轴载荷的转移
-
假设车身和悬架系统都是刚性系统。
-
假设车辆的运动和转向是由前轮驱动(front−wheel−only)的
坐标系
- 右手坐标系和左手坐标系
- 大地坐标系、车身坐标系、Frenet坐标系
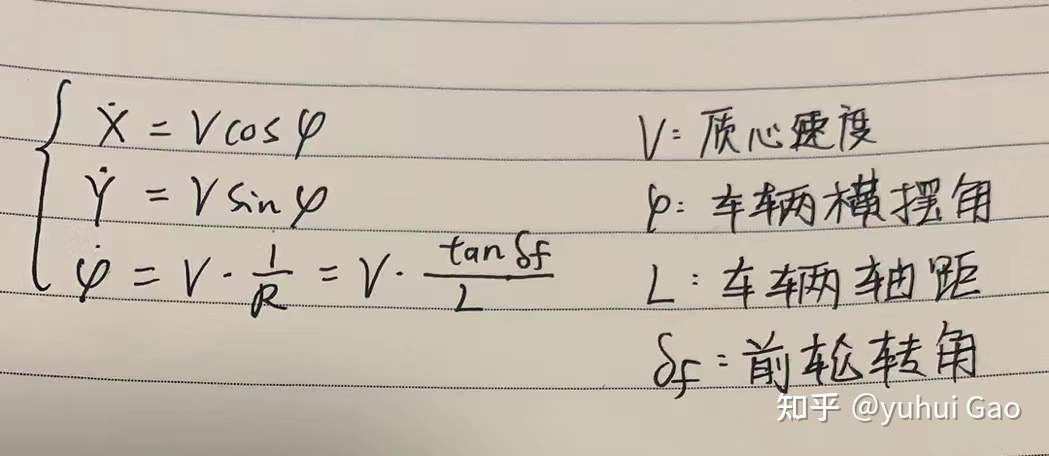
运动学模型
- 运动学模型说白了就是在车辆坐标系和大地坐标系的转换问题















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









