






永磁同步电机(PMSM)矢量控制,坐标变换到d-q轴后,采用SVPWM调制算法,进行速度电流双闭环控制,控制算法为PID,仿真结果如图所示。
(默认发MATLAB R2018b版本)
ID:837619153534569
利维能干的贝壳

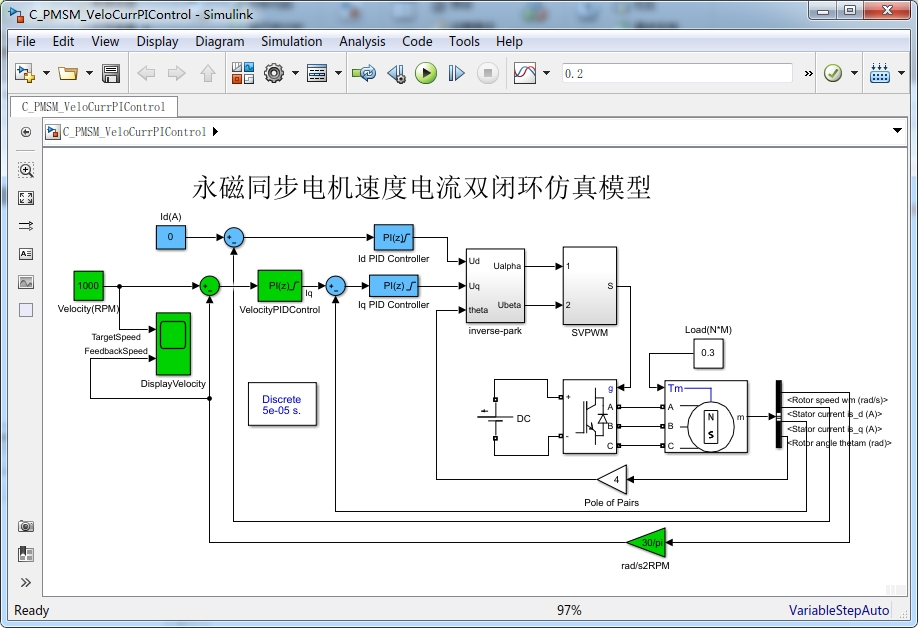
永磁同步电机(PMSM)是一种高效率、高功率密度的电机,广泛应用于工业自动化、电动汽车等领域。在PMSM的控制中,矢量控制是一种常用的控制方法。通过将电机坐标变换到d-q轴后,可以采用SVPWM调制算法进行控制。本文将介绍PMSM矢量控制中的坐标变换、SVPWM调制算法以及速度电流双闭环控制。
首先,对于PMSM的矢量控制,需要将电机坐标变换到d-q轴。d-q轴是与电机转子磁场同步的轴,因此在d-q轴上进行控制更为方便。坐标变换的目的是将三相参考坐标系abc转换为d-q轴参考坐标系,其中d轴与转子磁场同轴,q轴与d轴垂直。通过坐标变换,可以方便地控制PMSM的转矩和磁链。
接下来,采用SVPWM调制算法对PMSM进行控制。SVPWM是一种基于空间矢量的调制方法,通过调节三相电压的大小和相位差,实现对电机的控制。SVPWM的基本原理是将所需电压矢量分解为两个正弦波,然后通过控制正弦波的相位和幅值来实现对电机的控制。通过适当调整正弦波的相位和幅值,可以实现对PMSM的转矩和转速的控制。
至于速度电流双闭环控制,是为了更精确地控制PMSM的转速和转矩。在速度环控制中,采用PID控制算法来根据速度误差来调节电机输出的转矩。而电流环控制则是根据电流误差来调节电机的电流输出。通过速度电流双闭环控制,可以实现对PMSM的精确控制,提高控制的稳定性和响应速度。
为了验证矢量控制的效果,本文使用MATLAB R2018b版本进行了仿真。仿真结果如图所示,可以看出在采用永磁同步电机矢量控制并结合SVPWM调制算法以及速度电流双闭环控制的情况下,电机的转速和电流都能够得到稳定的控制。这验证了矢量控制在PMSM控制中的有效性和优越性。
综上所述,本文详细介绍了永磁同步电机矢量控制中的关键技术和算法,包括坐标变换、SVPWM调制以及速度电流双闭环控制。通过合理应用这些技术和算法,可以实现对PMSM的精确控制,提高电机的效率和性能。本文的仿真结果证明了矢量控制方法的有效性,同时也为进一步的研究和应用提供了参考。通过对永磁同步电机矢量控制的深入理解和掌握,可以进一步推动电机控制技术的发展,满足不同领域对电机性能和效率的需求。
相关代码 程序地址:http://nodep.cn/619153534569.html















 2070
2070











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









