







- Nerf:NeRF: Representing Scenes as Neural Radiance Fields for View Synthesis
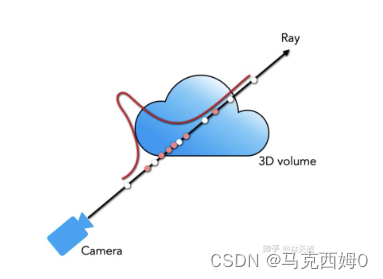
是一个MLP网络,模型的输入是x,y,z,和两个维度的角度信息,输出是rgb颜色信息和密度信息。用神经辐射场来表示三维的信息。然后由三维的信息可以转换成为被任意姿态观测的二维图像,这个过程称为渲染,渲染的方式与经典的volume rendering 方式类似,通过对射线进行分段随机采样,预测出颜色信息。
训练使用颜色作为残差项

- Nerf-SLAM:Real-Time Dense Monocular SLAM with Neural Radiance Fields
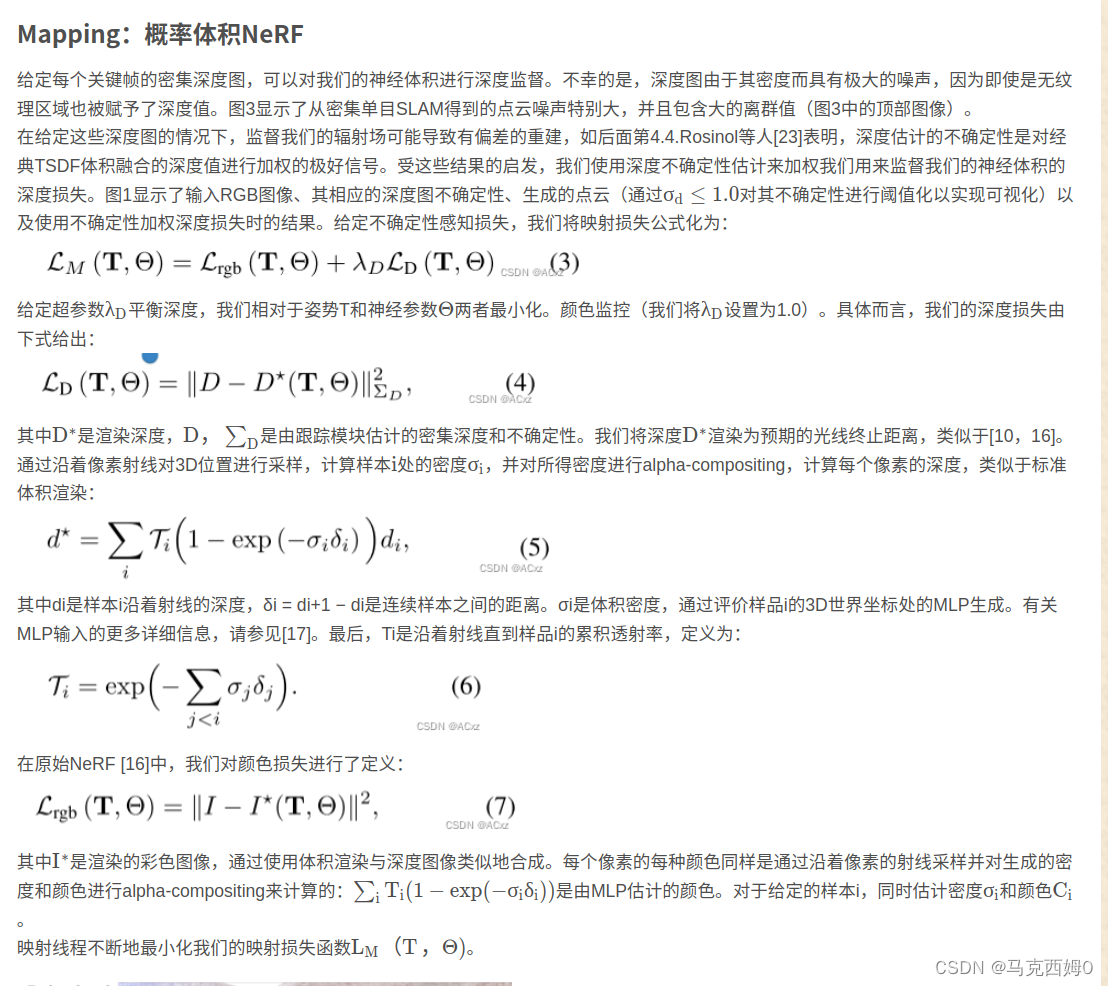
本文使用了Droid-SLAM,稠密的光流估计,也估计出了深度的不确定度。把深度图,深度的不确定度和相机位姿输入到NeRF网络里进行监督(残差引入了深度)。一个线程用来跟踪,另一个线程用来监督和渲染。本文称可以实时运行。















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









