






卡车无人机路径优化,卡车带无人机路径优化。
车辆无人机路径优化。
代码具有可复制性
ID:8857723971065484
保利龙小叮当
卡车无人机路径优化,是指在物流配送领域中,通过智能化技术和算法优化,使得卡车和无人机在运输过程中的路径规划和任务分配更加高效和优化。本文将围绕该主题展开探讨,并从代码的可复制性角度进行分析。
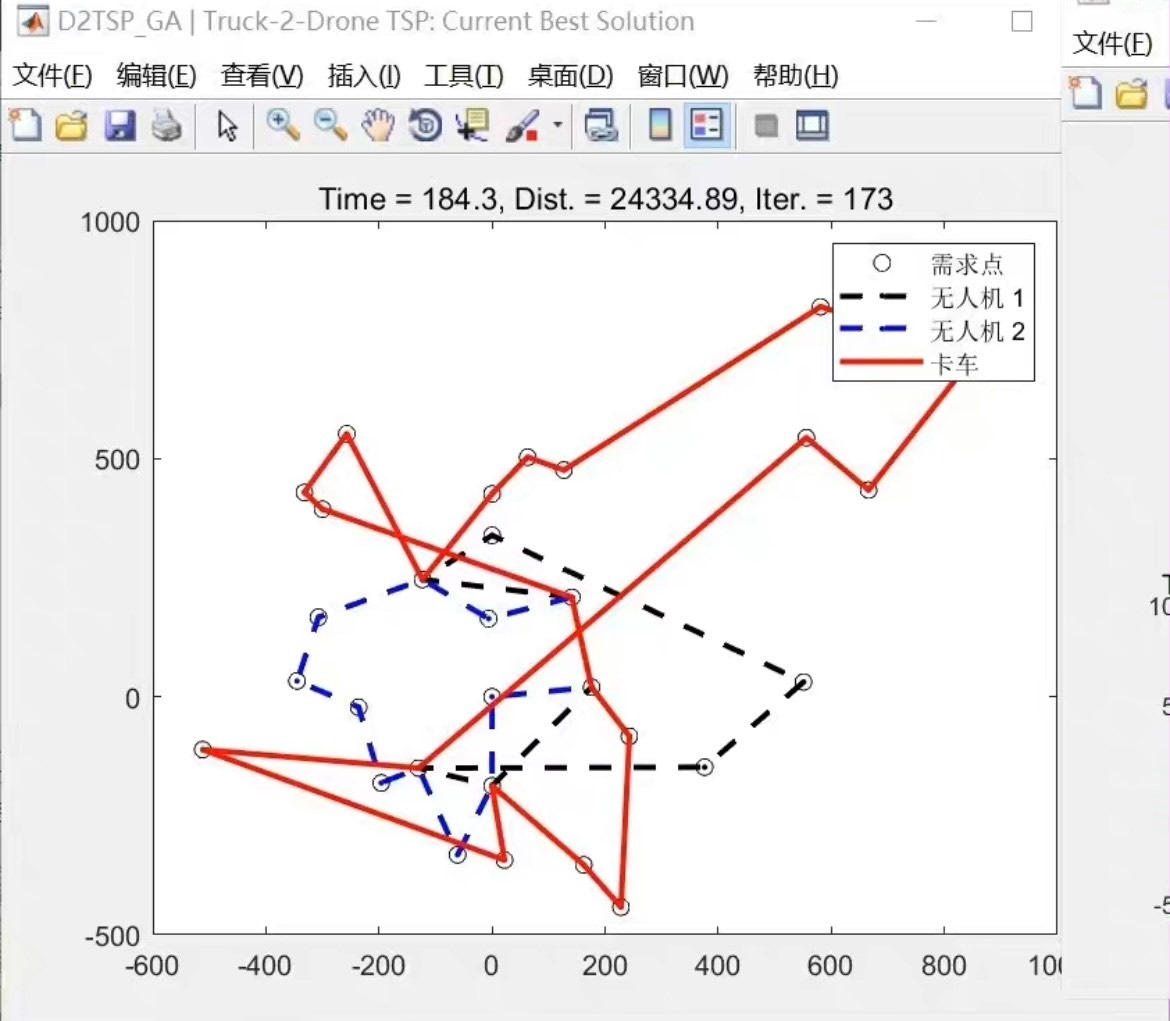
在当今快速发展的物流行业中,卡车和无人机被广泛应用于货物的运输和配送。卡车作为重要的物流运输工具,具有承载能力大、路线灵活等特点;而无人机则具有快速到达、穿越复杂地形的优势。将卡车和无人机结合起来进行配送,不仅可以提高运输效率,还可以减少人力成本和减轻交通压力。
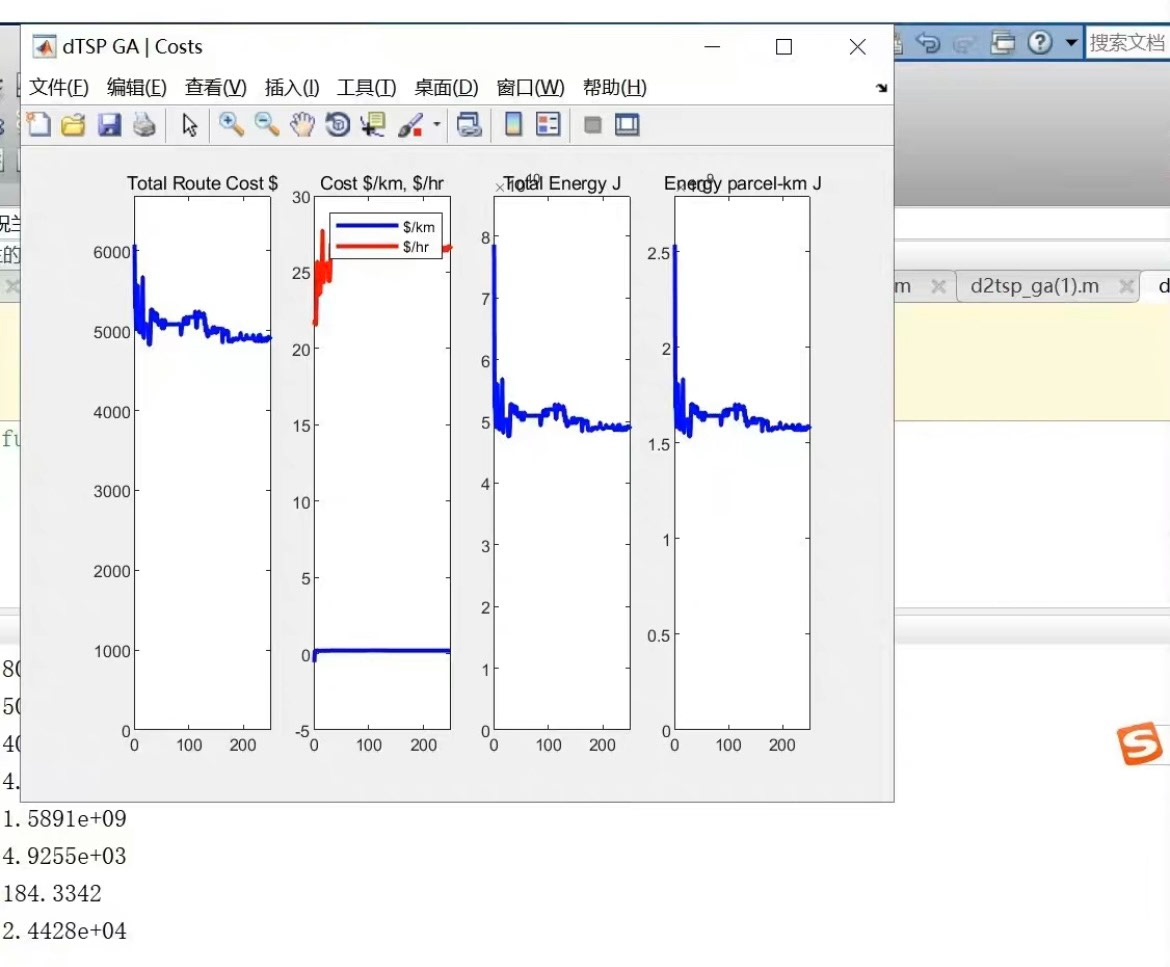
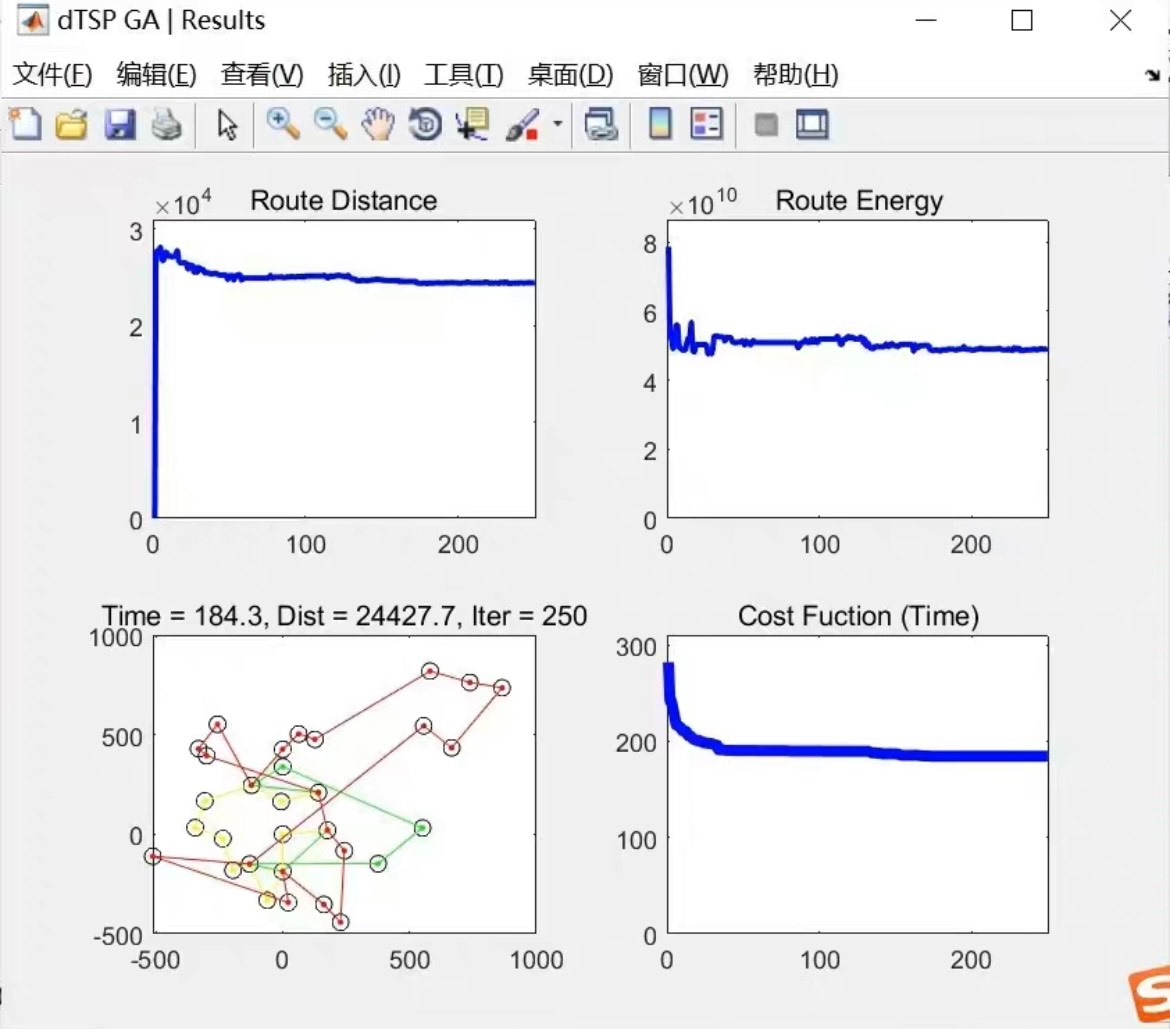
路径优化是卡车和无人机配送中的重要环节。通过优化路径规划,可以使得卡车和无人机的行驶路线更加合理和高效,最大程度地减少行驶距离和时间。而在路径规划的过程中,代码的可复制性是一个关键的因素。代码的可复制性意味着在不同的场景和环境中,代码可以被重新部署和应用,以实现路径规划的自动化和智能化。
代码的可复制性是现代软件开发中的一个重要概念。一个具有可复制性的代码,能够在不同的环境中重复使用,而不需要进行大量的修改和调整。在卡车和无人机路径优化的场景中,代码的可复制性能够使得路径规划算法可以被广泛应用于不同的物流配送系统中。例如,一种高效的路径规划算法可以被多个物流企业使用,以提高其配送效率和降低成本。
为了实现代码的可复制性,首先需要设计和开发出高可复用性的路径规划算法。高可复用性的算法应该具备良好的模块化和封装性,使得算法的不同部分可以独立运行和修改。其次,还需要提供清晰的接口和文档,使得其他开发者可以方便地理解和使用该算法。最后,还需要进行严格的测试和验证,以确保算法在不同的情况下都能够正常运行和表现出良好的性能。
在代码具有可复制性的基础上,卡车和无人机路径优化可以实现更加智能化和自动化的物流配送。通过将路径规划算法与实时数据、物流信息系统等技术相结合,可以实现实时的路径优化和任务分配。例如,可以根据货物的实际需求和配送点的情况,动态调整卡车和无人机的路径,使得配送过程更加高效和准确。
综上所述,卡车无人机路径优化是物流配送领域中的一个重要技术。通过优化路径规划和任务分配,可以提高配送效率和降低成本。而代码的可复制性则是实现路径优化的关键因素之一。通过设计和开发具有可复制性的路径规划算法,并将其与其他技术相结合,可以实现更加智能化和自动化的物流配送系统。这一技术的发展和应用将为物流行业带来巨大的改变和发展机遇。
【相关代码,程序地址】:http://fansik.cn/723971065484.html
















 3362
3362











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









