






在移动机器人领域,视觉里程计(Visual Odometry, VO)和视觉即时定位与地图构建(Visual SLAM, V-SLAM)对机器人实现自主导航至关重要。这些技术利用相机获取视觉数据,帮助机器人估计自身位置并构建环境地图。本文将深入探讨VO和V-SLAM的基础知识、方法论和应用,结合多项研究和实施案例,以飨读者。
视觉里程计(VO)
视觉里程计通过分析连续的相机图像,预测机器人在三维空间中的运动轨迹和姿态变化。它通过计算连续帧之间的特征点对应关系来增量式地确定机器人的轨迹,这些特征点通常包括角点、边缘或纹理等,它们在连续图像中具有独特性和可重复性,便于追踪和匹配。这种技术与惯性里程计类似,但依赖视觉数据,与传统的惯性里程计有所不同,视觉里程计能够在轮胎打滑或牵引不足时保持较高精度。
视觉里程计与惯性里程计相比有哪些优缺点?
- 丰富的环境信息:视觉里程计能够利用摄像头捕捉到丰富的图像信息,包括纹理、颜色和形状等,这些信息有助于提高定位的准确性和鲁棒性。
- 成本相对较低:相较于惯性测量单元(IMU),视觉传感器通常成本较低,易于集成到多种机器人平台中。
- 无需连续运动:视觉里程计不像惯性里程计那样依赖于连续的运动来估计位移,因此在低速或静态环境中也能有效工作。
视觉里程计的两类计算方法
1. 基于特征的运动估计:这类方法通过检测图像中的显著特征,并跟踪这些特征在帧间的运动来估计机器人的运动。
2. 光流法:直接使用像素的强度值,而非依赖于其显著特征,旨在最小化帧间的光度误差。
VO的工作流程
- 特征提取:VO首先从连续的图像帧中提取出稳定的特征点或特征线。这些特征通常具有良好的可重复性和独特性,能够抵抗光照变化和视角变化的影响。
- 特征匹配:接下来,VO将新帧中的特征与前一帧或一系列历史帧中的特征进行匹配,以确定特征点之间的对应关系。
- 运动估计:通过匹配的特征点,VO利用光流法或基于特征的运动估计算法计算相机的运动参数,即平移向量和平移矩阵。
- 累积误差校正:由于视觉测量的噪声和累积效应,VO的估计结果会逐渐积累误差。为了减少这种误差,VO可能采用滤波算法(如卡尔曼滤波器)或非线性优化方法进行误差补偿。
视觉即时定位与地图构建(V-SLAM)
视觉即时定位与地图构建(Visual Simultaneous Localization and Mapping,简称V-SLAM)扩展了视觉里程计的概念,通过同时构建环境地图和定位机器人在该地图中的位置来解决漂移问题。它集成了闭环检测技术,当机器人重新访问先前映射过的区域时,能够修正地图和轨迹估计中的累积误差。V-SLAM系统通常使用至少一个摄像头作为主要传感器,通过分析连续捕获的图像序列来估计机器人的位置,并构建环境的三维地图。
V-SLAM的关键组成部分
1. 传感器融合:结合多种传感器数据(如相机视觉数据、惯性测量单元)以提高定位精度。
2. 特征提取和匹配:提取完整的特征并在帧间进行匹配,以保持地图的一致性。
3. 优化:使用光束法平差和位姿图优化等优化技术来精化地图和姿态估计。
移动机器人中的应用
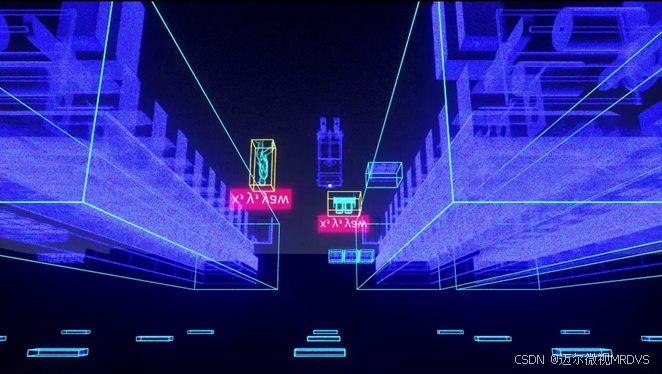
1. 室内导航:顶视系统利用朝上的摄像头在室内环境映射和导航。这些系统受益于顶视的稳定性和丰富特征,不易被人类或其他机器人等动态障碍物遮挡。
2. 多机器人系统:多机器人SLAM利用多个机器人进行协作,更高效地映射更大区域。每个机器人最初独立运作,通过强大数据关联技术,识别重叠区域,并将各个机器人生成的地图合并。
3. 动态环境:像直接法视觉里程计(DSO)这样的系统能够适应环境变化,适用于动态和拥挤的环境。这些系统会过滤移动物体以保持准确的定位和映射。直接法相比于传统的特征点法,最大的优点在于它能够以一种更加整体和优雅的方式来处理数据关联问题。特征点法则需要依赖高重复性的特征提取器和准确的特征匹配来正确计算相机的运动。
案例研究
1. 火星探测器:VO已成功应用于火星探测任务,帮助火星车在火星表面无GPS信号的地方进行导航。
2. 工业机器人:基于顶视的V-SLAM已应用在工业环境中,其允许机器人通过观察相对于地面更为静态的天花板在大型开放空间来导航。


















 5272
5272

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











