






车辆状态估计,扩展卡尔曼滤波EKF,无迹卡尔曼滤波UKF
角阶跃输入+整车7自由度模型+UKF状态估计模型+附送EKF状态估计模型,针对于轮毂电机分布式驱动车辆,进行车速,质心侧偏角,横摆角速度估计。
模型输入:方向盘转角delta,车辆纵向加速度ax
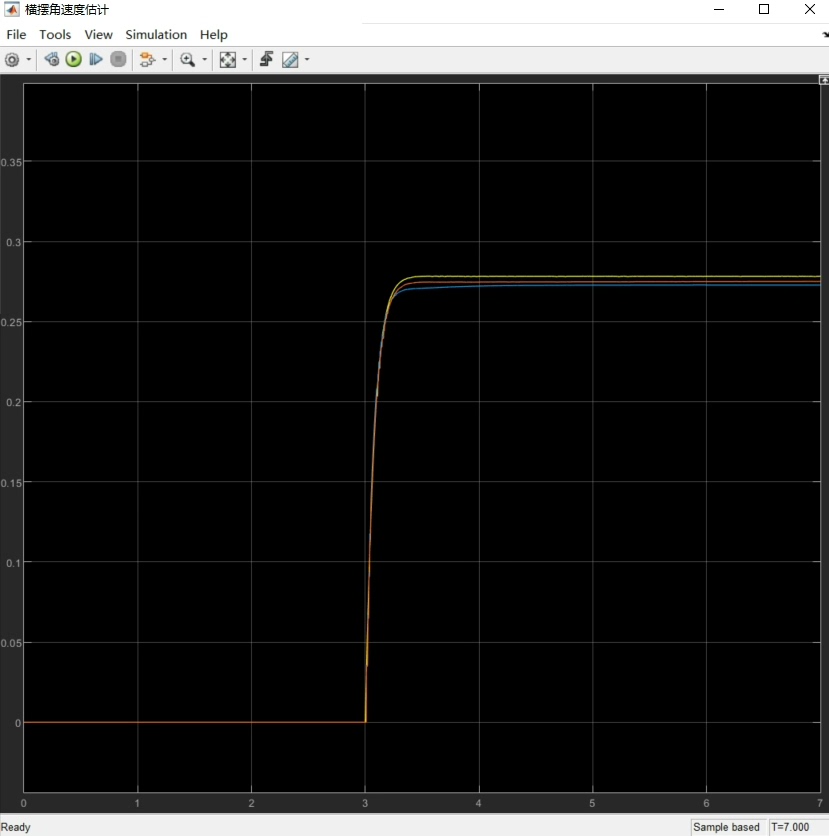
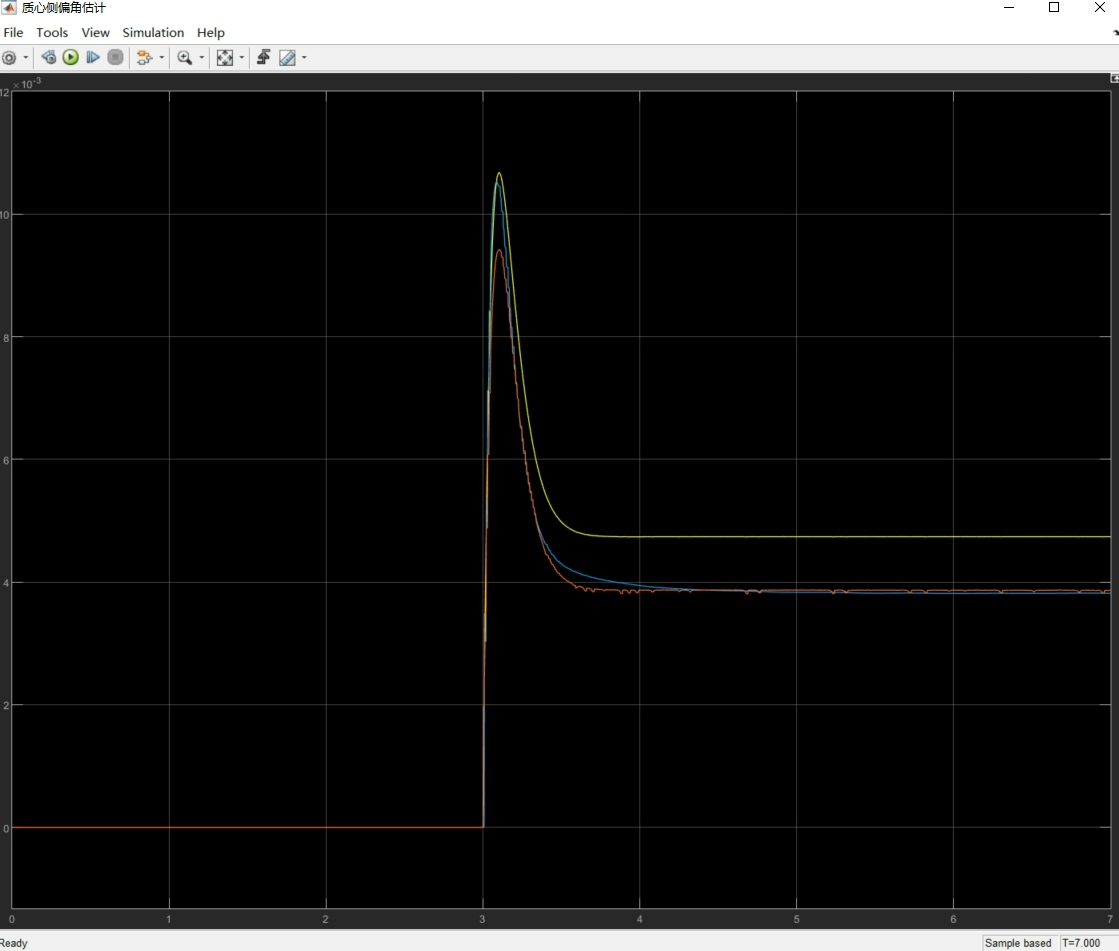
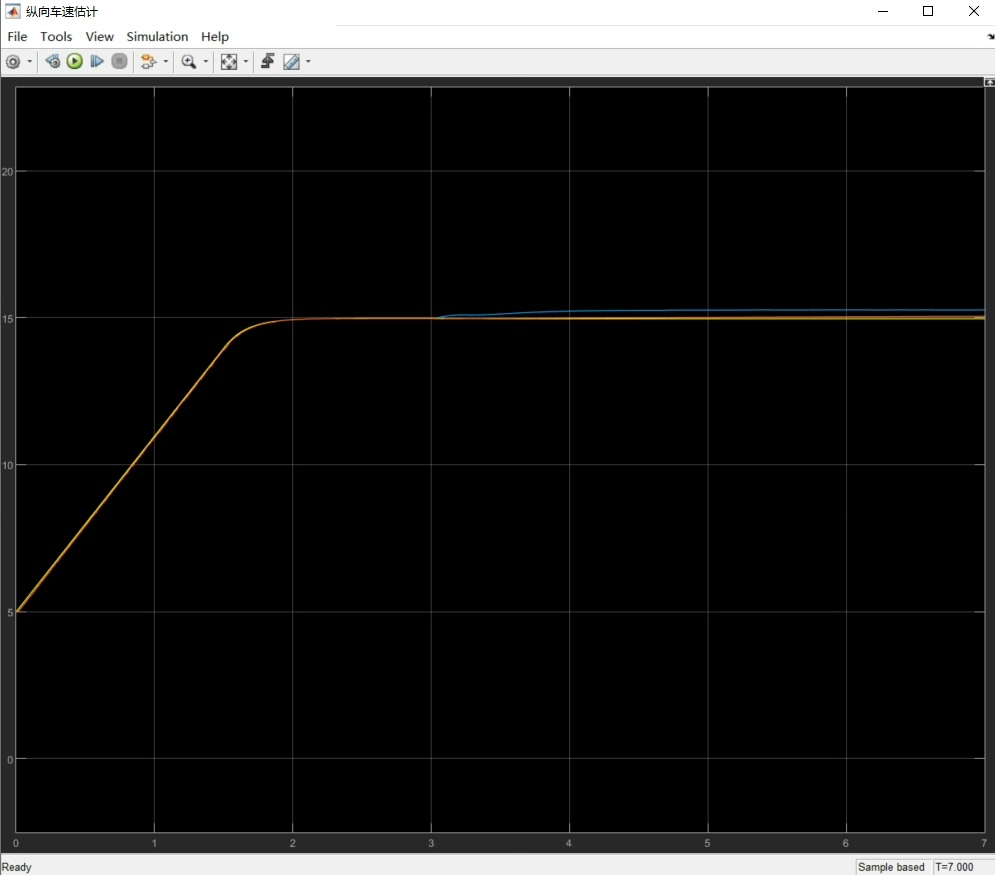
模型输出:横摆角速度wz,纵向车速vx,质心侧偏角β
模型附参考论文和说明文档
ID:6210712967279052
c***4
车辆状态估计已经成为自动驾驶技术中不可或缺的关键环节之一。其中,扩展卡尔曼滤波(EKF)和无迹卡尔曼滤波(UKF)是两种常用的状态估计方法。在本文中,我们将结合角阶跃输入、整车7自由度模型以及UKF和EKF状态估计模型,针对轮毂电机分布式驱动车辆,进行车速、质心侧偏角和横摆角速度的估计。
首先,我们要了解整车7自由度模型。整车7自由度模型是一种用于描述车辆运动的理论模型,它考虑了车辆在三个空间维度上的运动自由度,即纵向、横向和垂向。在这个模型中,车辆的运动状态由纵向车速vx、横摆角速度wz、质心侧偏角β以及其他相关参数组成。
接下来,我们将引入角阶跃输入,即方向盘转角delta和车辆纵向加速度ax。方向盘转角是驾驶员对车辆转向的输入控制量,而车辆纵向加速度是指车辆在纵向运动方向上的加速度。这两个输入量将作为我们模型的输入。
我们需要通过有限的输入量来估计车辆的状态量,即横摆角速度wz、纵向车速vx和质心侧偏角β。为了实现这个目标,我们将使用UKF和EKF两种状态估计模型。
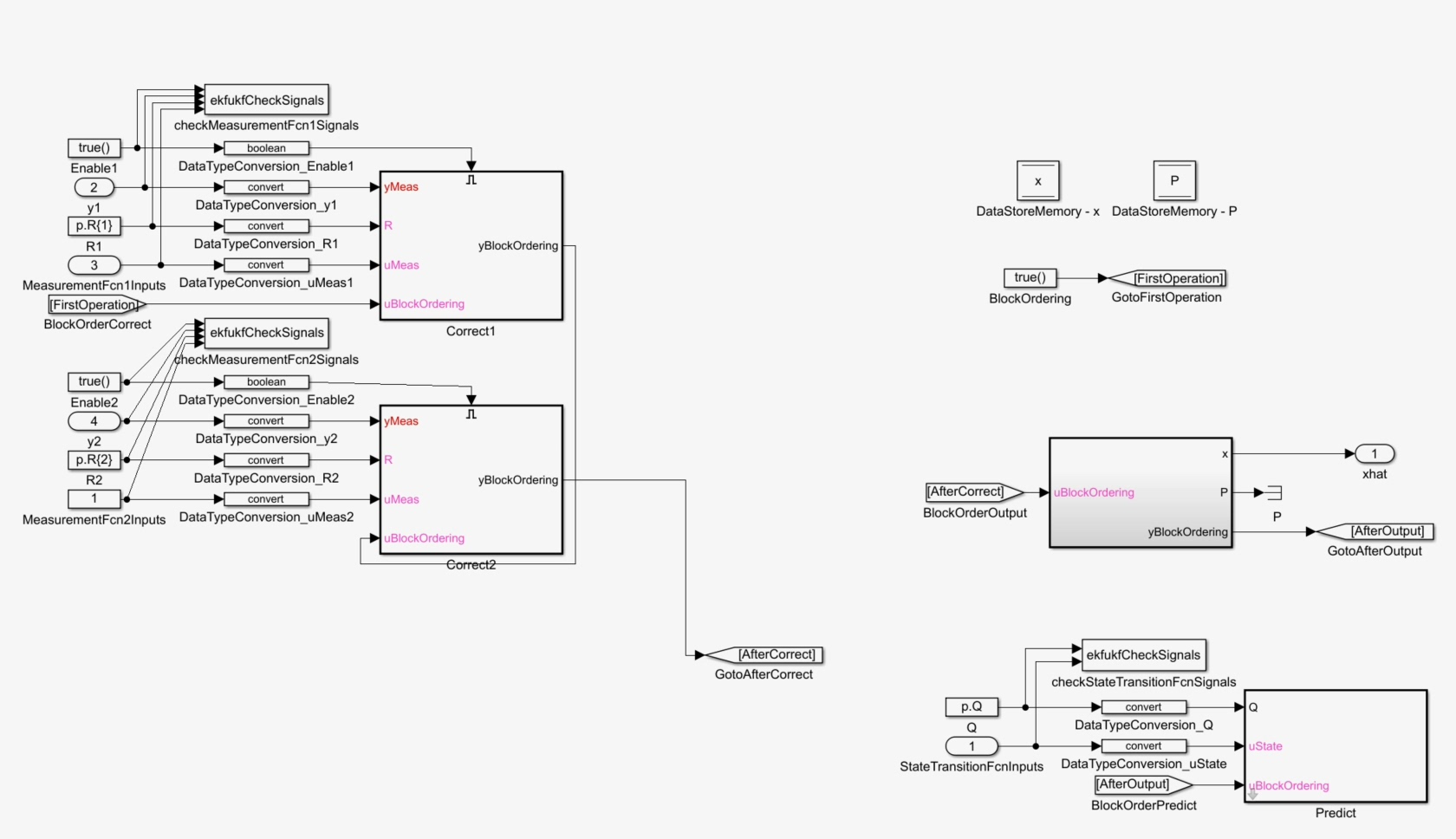
UKF是一种基于卡尔曼滤波的非线性状态估计算法。相较于传统的EKF,UKF通过选取一组代表性样本点(Sigma点)来代替EKF中的线性化过程,从而更好地适应非线性系统。在本文中,我们将使用UKF模型来进行车速、质心侧偏角和横摆角速度的估计。
此外,为了对比和验证UKF模型的效果,我们也将使用EKF状态估计模型进行同样的估计。EKF是一种基于卡尔曼滤波的线性状态估计算法,它通过线性化非线性系统来进行状态估计。我们将通过与UKF模型的对比来评估EKF模型在车辆状态估计中的性能。
最后,我们附上了参考论文和说明文档,以供读者了解更多关于该主题的研究成果和实践案例。这些参考文献和说明文档提供了更多的理论基础和应用示例,有助于读者深入理解车辆状态估计及其在自动驾驶技术中的应用。
综上所述,本文围绕车辆状态估计,在扩展卡尔曼滤波(EKF)和无迹卡尔曼滤波(UKF)模型的基础上,结合角阶跃输入、整车7自由度模型,针对轮毂电机分布式驱动车辆,进行车速、质心侧偏角和横摆角速度的估计。通过对UKF和EKF模型的评估和对比,我们可以更好地理解并应用这些状态估计方法,为自动驾驶技术的发展和应用提供技术支持。参考文献和说明文档进一步丰富了我们对该主题的理论基础和实践案例的认识。通过深入分析和实践,我们可以在车辆状态估计领域取得更好的进展,并为自动驾驶技术的发展做出贡献。
以上相关代码,程序地址:http://wekup.cn/712967279052.html















 527
527











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









