






连接实现

数据帧分析
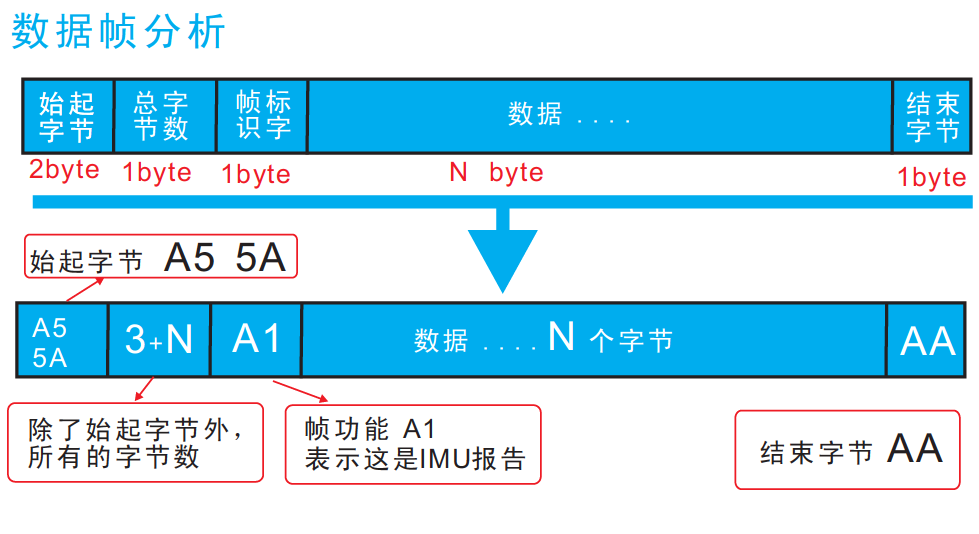
结算后的数据帧格式

数据接收的程序编写
特别提示 为了使你的系统软件更快地响应数据字节的接收,建议使用中断方式接收数据。 而不是使用查询模式接收字节。中断程序越精简越好,下面给出一个数据帧接收的范例程序。基于 单片机。移植需要开启串口中断,并在相应的中断程序中编写以下代码STM32F
数据接收与程序编写

数据的校验

C语言实现
/*
编写者:lisn3188
网址:www.chiplab7.com
作者E-mail:lisn3188@163.com
编译环境:MDK-Lite Version: 4.23
初版时间: 2012-05-25
测试: 本程序已在第七实验室的mini IMU上完成测试
功能:
使用串行中断程序接收mini IMU 的数据。
移植者需在自己编写对应的串口初始化程序,并开启接收中断。
在中断子程序中 需要做相应的改动
为了使用这个程序,你需要:
1.初始化你的串口,将波特率与模块的波特率设置成一致的
2.开启串口的接收中断,并参考以下程序编写中断子程序
参考 void USART2_IRQHandler(void)
3.在主程序的循环体中,定时调用子程序:
void UART2_CommandRoute(void)
以检查是否收到新的数据帧
所有的姿态数据和ADC值都会在 UART2_CommandRoute
中进行更新。
4.使用 以下值会自动更新:
float yaw, //偏航角
pitch,//俯仰
roll, //滚转
alt, //高度
tempr,//温度
press;//气压
int16_t ax, ay, az;//加速度计
int16_t gx, gy, gz;//陀螺仪
int16_t hx, hy, hz;//磁力计
------------------------------------
*/
//uart reicer flag
#define b_uart_head 0x80 //收到A5 头 标志位
#define b_rx_over 0x40 //收到完整的帧标志
// USART Receiver buffer
#define RX_BUFFER_SIZE 100 //接收缓冲区字节数
volatile unsigned char rx_buffer[RX_BUFFER_SIZE]; //接收数据缓冲区
volatile unsigned char rx_wr_index; //缓冲写指针
volatile unsigned char RC_Flag; //接收状态标志字节
//解算后的角度值
float yaw, //偏航角
pitch,//俯仰
roll, //滚转
alt, //高度
tempr,//温度
press;//气压
//ADC值
int16_t ax, ay, az;//加速度计
int16_t gx, gy, gz;//陀螺仪
int16_t hx, hy, hz;//磁力计
//GPS位置信息
float GPS_Altitude , //天线离海平面的高度,-9999.9到9999.9米
Latitude_GPS , //纬度 单位为度
Longitude_GPS , //经度 单位为度
Speed_GPS , //地面速率 单位 米每秒
Course_GPS ; //地面航向(000.0~359.9度,以真北为参考基准)
unsigned char GPS_STA_Num ;
//在接收完一帧IMU姿态报告后,调用这个子程序来取出姿态数据
void UART2_Get_IMU(void)
{
int16_t temp;
temp = 0;
temp = rx_buffer[2];
temp <<= 8;
temp |= rx_buffer[3];
if(temp&0x8000){
temp = 0-(temp&0x7fff);
}else temp = (temp&0x7fff);
yaw=(float)temp / 10.0f; //偏航角
temp = 0;
temp = rx_buffer[4];
temp <<= 8;
temp |= rx_buffer[5];
if(temp&0x8000){
temp = 0-(temp&0x7fff);
}else temp = (temp&0x7fff);
pitch=(float)temp / 10.0f;//俯仰
temp = 0;
temp = rx_buffer[6];
temp <<= 8;
temp |= rx_buffer[7];
if(temp&0x8000){
temp = 0-(temp&0x7fff);
}else temp = (temp&0x7fff);
roll=(float)temp / 10.0f;//滚转
temp = 0;
temp = rx_buffer[8];
temp <<= 8;
temp |= rx_buffer[9];
if(temp&0x8000){
temp = 0-(temp&0x7fff);
}else temp = (temp&0x7fff);
alt=(float)temp / 10.0f;//高度
temp = 0;
temp = rx_buffer[10];
temp <<= 8;
temp |= rx_buffer[11];
if(temp&0x8000){
temp = 0-(temp&0x7fff);
}else temp = (temp&0x7fff);
tempr=(float)temp / 10.0f;//温度
temp = 0;
temp = rx_buffer[12];
temp <<= 8;
temp |= rx_buffer[13];
if(temp&0x8000){
temp = 0-(temp&0x7fff);
}else temp = (temp&0x7fff);
press=(float)temp * 10.0f;//气压
}
//在接收一帧ReportMotion 后调用这个子程序来取出ADC数据
void UART2_Get_Motion(void)
{
int16_t temp;
temp = 0;
temp = rx_buffer[2];
temp <<= 8;
temp |= rx_buffer[3];
if(temp&0x8000){
temp = 0-(temp&0x7fff);
}else temp = (temp&0x7fff);
ax=temp;//加速度计 X轴的ADC值
temp = 0;
temp = rx_buffer[4];
temp <<= 8;
temp |= rx_buffer[5];
if(temp&0x8000){
temp = 0-(temp&0x7fff);
}else temp = (temp&0x7fff);
ay=temp;//加速度计 Y轴的ADC值
temp = 0;
temp = rx_buffer[6];
temp <<= 8;
temp |= rx_buffer[7];
if(temp&0x8000){
temp = 0-(temp&0x7fff);
}else temp = (temp&0x7fff);
az=temp;//加速度计 Z轴的ADC值
temp = 0;
temp = rx_buffer[8];
temp <<= 8;
temp |= rx_buffer[9];
if(temp&0x8000){
temp = 0-(temp&0x7fff);
}else temp = (temp&0x7fff);
gx=temp;//陀螺仪 X轴的ADC值
temp = 0;
temp = rx_buffer[10];
temp <<= 8;
temp |= rx_buffer[11];
if(temp&0x8000){
temp = 0-(temp&0x7fff);
}else temp = (temp&0x7fff);
gy=temp;//陀螺仪 Y轴的ADC值
temp = 0;
temp = rx_buffer[12];
temp <<= 8;
temp |= rx_buffer[13];
if(temp&0x8000){
temp = 0-(temp&0x7fff);
}else temp = (temp&0x7fff);
gz=temp;//陀螺仪 Z轴的ADC值
temp = 0;
temp = rx_buffer[14];
temp <<= 8;
temp |= rx_buffer[15];
if(temp&0x8000){
temp = 0-(temp&0x7fff);
}else temp = (temp&0x7fff);
hx=temp;//磁力计 X轴的ADC值
temp = 0;
temp = rx_buffer[16];
temp <<= 8;
temp |= rx_buffer[17];
if(temp&0x8000){
temp = 0-(temp&0x7fff);
}else temp = (temp&0x7fff);
hy=temp;//磁力计 Y轴的ADC值
temp = 0;
temp = rx_buffer[18];
temp <<= 8;
temp |= rx_buffer[19];
if(temp&0x8000){
temp = 0-(temp&0x7fff);
}else temp = (temp&0x7fff);
hz=temp;//磁力计 Z轴的ADC值
}
//在接收完一帧GPS位置报告后,调用这个子程序来取出姿态数据
void UART2_Get_GPS(void)
{
long int temp;
//经度值,单位0.0001度。当传送的值为 1234567 表示 123.4567度
temp = 0;
temp = ((long int)rx_buffer[2]<<24);
temp |= ((long int)rx_buffer[3]<<16);
temp |= ((long int)rx_buffer[4]<<8);
temp |= ((long int)rx_buffer[5]);
Longitude_GPS = ((float)temp) / ((float)10000.0);
//纬度值,单位0.0001度。当传送的值为 123456 表示 12.4567度
temp = 0;
temp = ((long int)rx_buffer[6]<<24);
temp |= ((long int)rx_buffer[7]<<16);
temp |= ((long int)rx_buffer[8]<<8);
temp |= ((long int)rx_buffer[9]);
Latitude_GPS = ((float)temp) / ((float)10000.0);
//GPS海拔高度值,单位0.1米。当传送值为 1623 表示当前海拔为 162.3米
temp = 0;
temp |= ((long int)rx_buffer[10]<<8);
temp |= ((long int)rx_buffer[11]);
GPS_Altitude = ((float)temp) / ((float)10.0);
//锁定的卫星数量, 0 表示没有定位、
GPS_STA_Num = rx_buffer[12];
//GPS航向值,单位0.1度。当传送值为 125时,表示12.5度。
temp = 0;
temp |= ((long int)rx_buffer[13]<<8);
temp |= ((long int)rx_buffer[14]);
Course_GPS = ((float)temp) / ((float)10.0);
//GPS速度,单位0.1米/S 当传送的值为 255时,表示 25.5M/S
temp = 0;
temp |= ((long int)rx_buffer[15]<<8);
temp |= ((long int)rx_buffer[16]);
Speed_GPS = ((float)temp) / ((float)10.0);
}
//以下中断子程序是基于STM32的,如果你使用的不是STM32 请做相应的修改
//------------------------------------------------------
void USART2_IRQHandler(void) //接收中断子程序
{
unsigned char data;
if(USART_GetITStatus(USART2, USART_IT_RXNE) != RESET) //是否收到数据?
{
data=USART_ReceiveData(USART2); //读取接收到的字节
if(data==0xa5)
{
RC_Flag|=b_uart_head; //如果接收到A5 置位帧头标专位
rx_buffer[rx_wr_index++]=data; //保存这个字节.
}
else if(data==0x5a)
{
if(RC_Flag&b_uart_head) //如果上一个字节是A5 那么认定 这个是帧起始字节
{ rx_wr_index=0; //重置 缓冲区指针
RC_Flag&=~b_rx_over; //这个帧才刚刚开始收
}
else //上一个字节不是A5
rx_buffer[rx_wr_index++]=data;
RC_Flag&=~b_uart_head; //清帧头标志
}
else
{ rx_buffer[rx_wr_index++]=data;
RC_Flag&=~b_uart_head;
if(rx_wr_index==rx_buffer[0]) //收够了字节数.
{
RC_Flag|=b_rx_over; //置位 接收完整的一帧数据
}
}
if(rx_wr_index==RX_BUFFER_SIZE) //防止缓冲区溢出
rx_wr_index--;
/* Clear the USART2 Recive interrupt */
USART_ClearITPendingBit(USART2, USART_IT_RXNE); //清中断标志.
}
}
//--校验当前接收到的一帧数据是否 与帧校验字节一致
unsigned char Sum_check(void)
{
unsigned char i;
unsigned int checksum=0;
for(i=0;i<rx_buffer[0]-2;i++)
checksum+=rx_buffer[i];
if((checksum%256)==rx_buffer[rx_buffer[0]-2])
return(0x01); //Checksum successful
else
return(0x00); //Checksum error
}
//--这个子程序需要在主程序中 定时调用,以检查 串口是否接收完一帧数据
void UART2_CommandRoute(void)
{
if(RC_Flag&b_rx_over){ //已经接收完一帧?
RC_Flag&=~b_rx_over; //清标志先
if(Sum_check()){
//校验通过
if(rx_buffer[1]==0xA1){ //UART2_ReportIMU 的数据
UART2_Get_IMU(); //取数据
}
if(rx_buffer[1]==0xA2){ //UART2_ReportMotion 的数据
UART2_Get_Motion(); //取数据
}
if(rx_buffer[1]==0xA3){ //UART2_ReportPosition 的数据
UART2_Get_GPS(); //取数据
}
}//校验是否通过?
}
}















 999
999











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











