






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
遗传算法(Genetic Algorithm,GA)是一种启发式搜索和优化算法,受到了达尔文的自然选择理论的启发,模拟了生物进化过程中的基本原理。 遗传算法通过模拟自然选择、交叉和变异等生物进化过程,来搜索问题的最优解。 算法利用进化论中的基本概念,如种群、个体、基因型和表现型等来描述问题的解空间。 通过代代遗传、自然选择和生存竞争等机制,逐步优化种群中的个体,以找到问题的最优解或近似最优解。 遗传算法具有较好的全局搜索能力和较强的鲁棒性,能够处理复杂的优化问题。 算法不需要问题的导数信息,适用于黑箱函数优化和非线性优化问题。 遗传算法能够在大规模优化问题和高维优化问题中发挥作用,并且易于并行化。
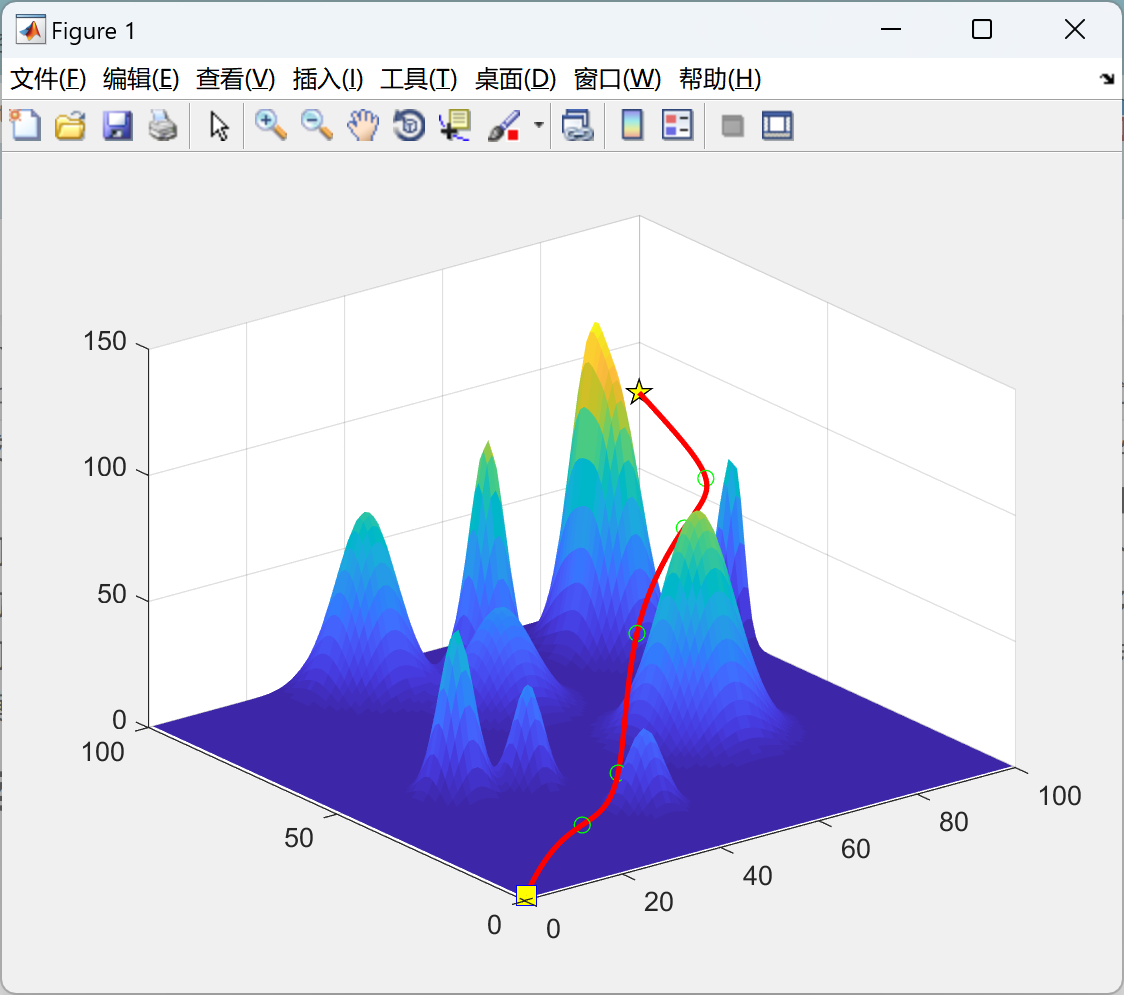
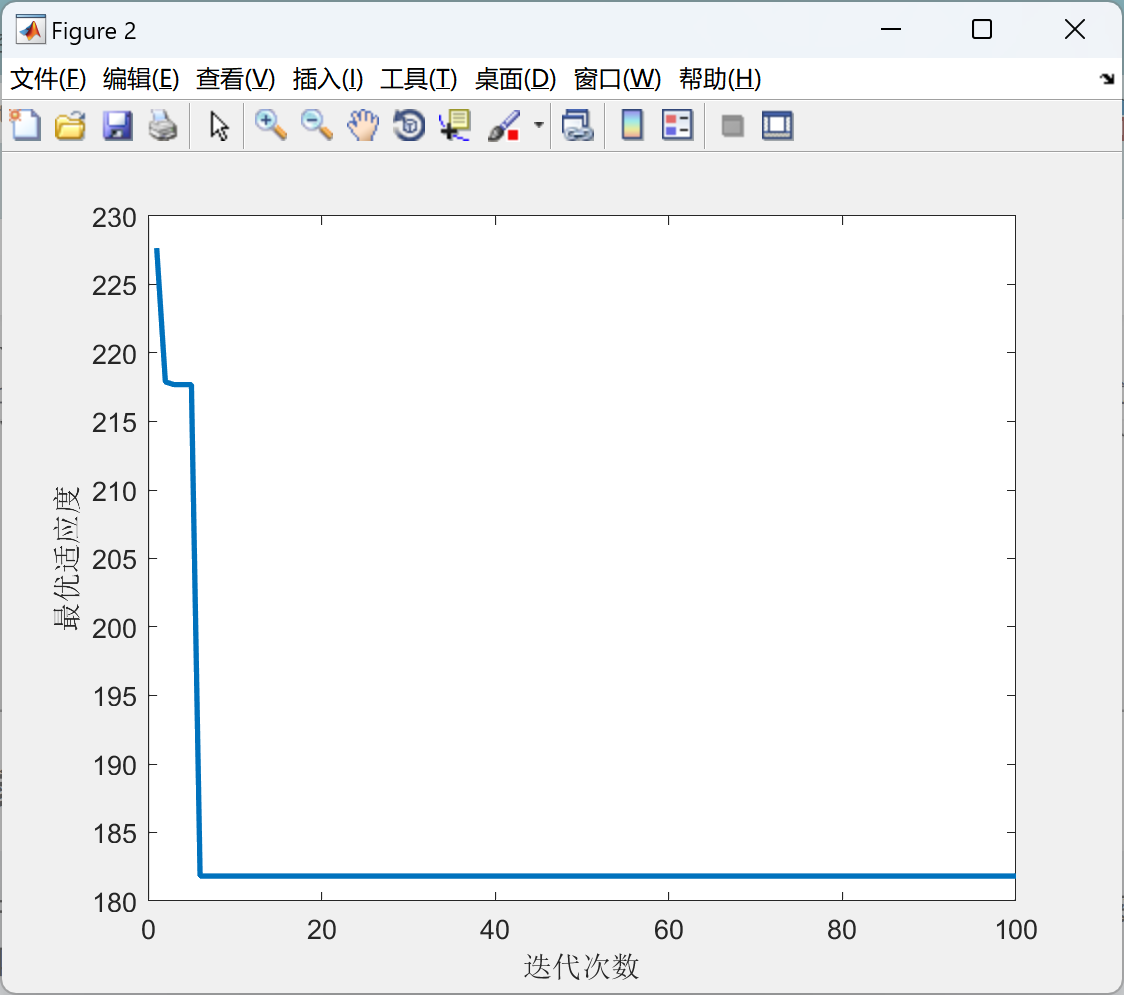
📚2 运行结果
 主函数部分代码:
主函数部分代码:
clc
clear
close all
%% 三维路径规划模型
startPos = [1, 1, 1];
goalPos = [100, 100, 80];
% 定义山峰地图
posBound = [0,100; 0,100; 0,100;];
% 地图长、宽、高范围
[X,Y,Z] = defMap(posBound);
%% 设置超参数
chromLength = 5; % 染色体长度,代表路线的控制点数,未加首末两点
p_select = 0.5; % 选择概率
p_crs = 0.8; % 交叉概率
p_mut = 0.2; % 变异概率
popNum = 50; % 种群规模
iterMax = 100; % 最大迭代数
%% 种群初始化
% 产生初始种群
pop = initPop(popNum,chromLength,posBound);
% 计算种群适应度
pop = calFitness(startPos, goalPos, X,Y,Z,pop);
% 更新种群最优
GlobalBest.fitness = inf; % 初始化每一代的最优粒子
[pop,GlobalBest] = calBest(pop,GlobalBest);
%% 主程序
for i = 1:iterMax
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]张星宇,吴保磊,王军,等.基于滑移预测的月球车双层路径规划方法研究[J/OL].系统仿真学报:1-17[2024-04-21].https://doi.org/10.16182/j.issn1004731x.joss.23-1552.
[2]符运来,王魏,刘妙男,等.基于改进P-RRT*算法的无人船路径规划[J/OL].控制工程:1-8[2024-04-21].https://doi.org/10.14107/j.cnki.kzgc.20231049.















 2015
2015











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









