







Learning-Based Efficient Phase-Amplitude Modulation and Hybrid Control for MRI-Guided Focused Ultrasound Treatment
Authors: Jing Dai, Student Member, IEEE, Bohao Zhu, Member, IEEE, Xiaomei Wang, Member, IEEE, Zhiyi Jiang, Mengjie Wu, Liyuan Liang, Xiaochen Xie, Senior Member, IEEE, James Lam, Fellow, IEEE, Hing-Chiu Chang, and Ka-Wai Kwok, Senior Member, IEEE
Source: IEEE ROBOTICS AND AUTOMATION LETTERS, VOL. 9, NO. 2, FEBRUARY 2024
Abstract:
磁共振引导聚焦超声 (MRg-FUS) 因其非侵入性而变得具有吸引力。然而,由于软组织异质性引起的像差,超声束的聚焦和转向仍然具有挑战性。特别是对于波束运动控制,以确保在腹部器官的深部区域进行实时和精确的跟踪,同时考虑全波传播。为此,我们提出了一种闭环混合控制方案和一种基于学习的机器人辅助MRg-FUS治疗调制模型。通过引入快速相位估计器来提供高效的 (<3 ms) 解决方案,即使在未知干扰下,强大的 H 控制器也能实现实时和准确的跟踪 (0.30 mm),而无需事先了解异构介质。我们的模型可实现快速(2.65 ms)相位幅度调制和精确定位(平均值0.35 mm,最大值0.65 mm),符合临床标准。焦点倾角仅显着“对齐”至 2.7°。灵敏度分析和换能器设计的结果也支持了该模型在广泛的MRg-FUS治疗中的临床可行性和潜力。
在这封信中,提出了一种基于学习的调制模型和混合控制框架,用于HIFU和LIFU。这是首次尝试使用ML技术解决全波像差校正和光束运动控制的逆问题。
主要工作贡献如下:
1)为HIFU应用的软组织诱导像差开发一种基于学习的、无网格的、安全的补偿方案,该方案允许快速的全波相位幅度调制,同时实现精确的光束重新聚焦和恢复。
2)设计一个混合控制框架,该框架结合了快速相位估计器和用于LIFU的闭环鲁棒H控制器,即使在未知干扰下,也无需事先了解异构介质,即可在大范围内实现实时、鲁棒的跟踪。
3)结果相控阵设计的概念验证、模型灵敏度、计算效率、相位幅度调制靶向、跟踪鲁棒性和焦点倾角对齐,以支持其在HIFU和LIFU中的临床可行性和潜力。

图 1.(a)羊肝脏中的MR-ARFI组织位移图(以μm为单位)。(b) MRI引导的5-DoF机械人平台,为焦点转向提供足够的工作空间。(c) 显示相位像差效应的相场,其中波前由于组织异质性而异相。(d) 带有光栅裂片的扭曲焦点。

图 2.框架概述。(a) 闭环混合控制方案。相位信号由反馈方案和基于ELM的快速相位估计器生成。(b) 同时进行相位和幅度像差校正。目标位置充当 ELM 网络的输入,该网络映射到每个元素的所需相位和振幅模式。

图 3.(a)相位图和(b)幅图的灵敏度分析。训练样本数从总样本的 10% 到 100% 不等。

图 4.(a)所提出的基于学习的调制模型和传统的基于有限元分析的方法,以及(b)相位估计器的计算效率。处理时间以对数刻度显示。

图 5.(a) 换能器孔径大小与焦移。(b) 两个例子显示了孔径大小对光束形成的影响。焦点在肝脏 ROI 内以归一化强度可视化。p∗、pPAC 和 pNC 分别表示在真值、相位幅度校正和非校正条件下的焦点位置。
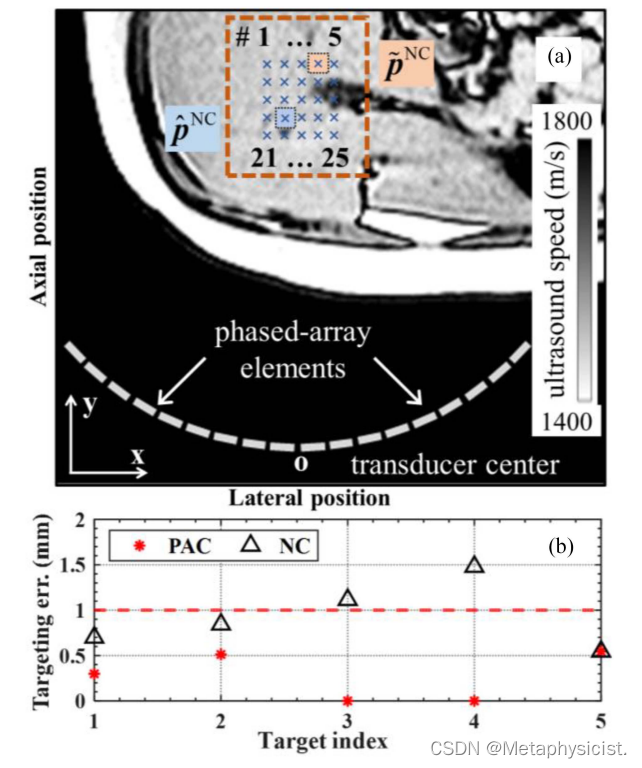
图 6.(a) 在肝脏 ROI 中选择的测试样本 (#1∼25)。p、“∼”和“^”的上标分别表示最大 (#1) 和最小 (#17) 焦点瞄准精度提高的目标。(b) 在五个最深的目标点进行重点瞄准。
表 I 对焦精度的平均值和最大值
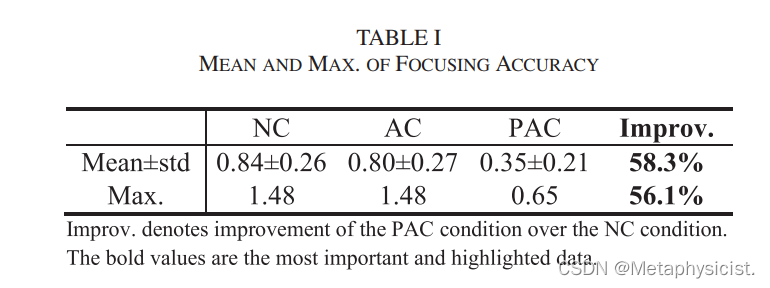

图 7.(a) PAC和NC情况之间的焦点倾角差异,其中最大和最小差异分别由黑色和红色虚线的气泡表示。目标的光束轮廓 (b) 最大 (#1) 和 (c) 最小 (#17) 目标精度,以及 (d) 最大 (#1) 和 (e) 最小 (#25) 倾角减小的目标。红色箭头表示具有最大特征值的协方差矩阵的特征向量。
表II:局灶倾角的平均值和最大值

结论和未来工作
在这封信中,提出了一个基于学习的调制和控制框架,用于广泛的MRg-FUS治疗,而无需先验了解异质介质。该模型可确保同时对相位和幅度像差进行快速(2.65 ms)全波校正。这使得在临床要求下具有较高的靶向精度(平均0.35 mm,最大0.65 mm),从而减轻了脱靶加热。此外,可以有效抑制不需要的光栅瓣,并且焦点倾角仅“对齐”到2.7°,从而降低了组织损伤的风险。与NC情况相比,目标误差降低了58.3%,倾角降低了67.9%。与劳动密集型和计算成本的传统方法相比,ML方法可获得快速调制,大大缩短了优化传感器设计所需的时间。模型灵敏度和计算效率的结果也支持了该模型在腹部器官上HIFU的可行性。闭环混合控制方法确保了即使在未知干扰下也能沿预期轨迹的精确跟踪精度(0.30 mm)。如此强大的跟踪性能证明了控制策略在 LIFU 应用中在人体内部的适应性。该估算器可以为鲁棒控制器提供计算效率高的相位致动(<3 ms),以促进实时光束运动控制。
未来,将在一系列离体或体内HIFU/LIFU实验(例如轻度热疗)中实现概念验证转导和控制器。此外,振幅校正可能会导致那些吸收率高的健康组织的功率发射增加,从而导致过热的风险。利用ML驱动的设计方法来进一步优化传感器配置(例如,鞍形传感器)将是一个很有前途的解决方案。















 2万+
2万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











