







 超级会员免费看
超级会员免费看
 该文介绍了如何将3D点云数据投影到不同的二维平面,如xy、xz和yz平面,通过数学原理推导和Python代码实现展示了投影过程。代码中使用了numpy和可视化库进行计算和图形展示。
该文介绍了如何将3D点云数据投影到不同的二维平面,如xy、xz和yz平面,通过数学原理推导和Python代码实现展示了投影过程。代码中使用了numpy和可视化库进行计算和图形展示。
目录
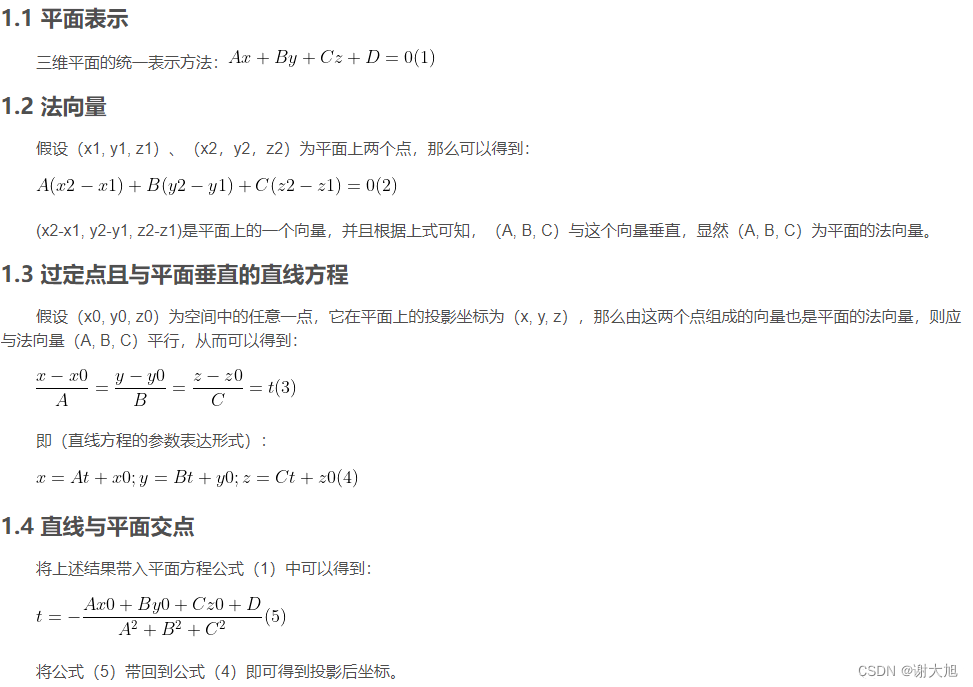
一、原理推导
点云是在一个三维空间中由一堆无序的点所组成,那么在三维中理所应该可以在任意的二维平面:Ax + By + Cz + D = 0 中进行投影,获得不同平面中的二维视图。
下面讲给出基础知识与手动推导过程,并使用代码进行验证推导结果。
感谢网络大佬的实现,让我可以偷懒cv
import numpy as np
import mayavi.mlab as mlab
# 参数说明:
# - points:点云数据
# - flat:3d平面的参数,Ax+By+Cz+D=0,参数即为(A,B,C,D)
# xy平面:(0 0 1 0) | xz平面:(0 1 0 0) | yz平面:(1 0 0 0)
def project_2d(points, flat):
# 点云投影平面
A, B, C, D = flat
dist
 订阅专栏 解锁全文
订阅专栏 解锁全文



















 3900
3900

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











