






自动驾驶控制算法 -几何路径跟踪方法(Pure Pursuit和Stanley Method)
几何路径跟踪(Geometric Path Tracking)算法是自动驾驶中比较流行的路径跟踪控制方法之一。这类方法利用车辆与参考路径之间的几何关系,得到路径跟踪问题的控制律。通常,其利用“预瞄距离”(look ahead distance)来测量车辆前方的误差。最典型的几何路径跟踪控制方法是Pure Pursuit和Stanley方法,下面分别对其进行介绍(我们只考虑横向前轮转角的控制)。
附赠自动驾驶最全的学习资料和量产经验以及1000T的资源分享:链接
1. 几何车辆模型(Geometric Vehicle Model)
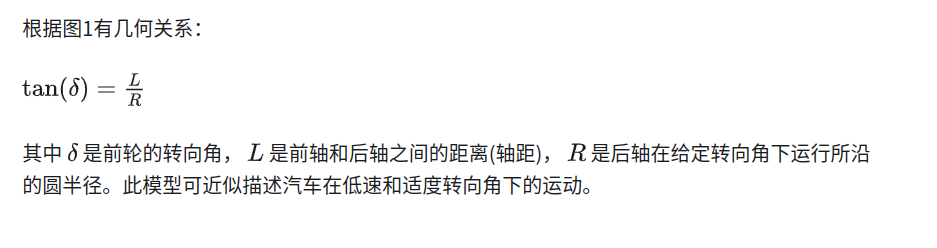
用于几何路径跟踪的阿克曼转向车辆的一个常见简化是自行车模型,或者叫单车模型。自行车模型简化了四轮汽车,将两个前轮和两个后轮组合在一起,形成一个两轮模型。自行车模型的第二个简化假设是,车辆只能在平面上进行移动。这些简化导致前轮转向角和后轴轨迹曲率之间将遵循简单的几何关系,如图1所示。

图1 几何单车模型
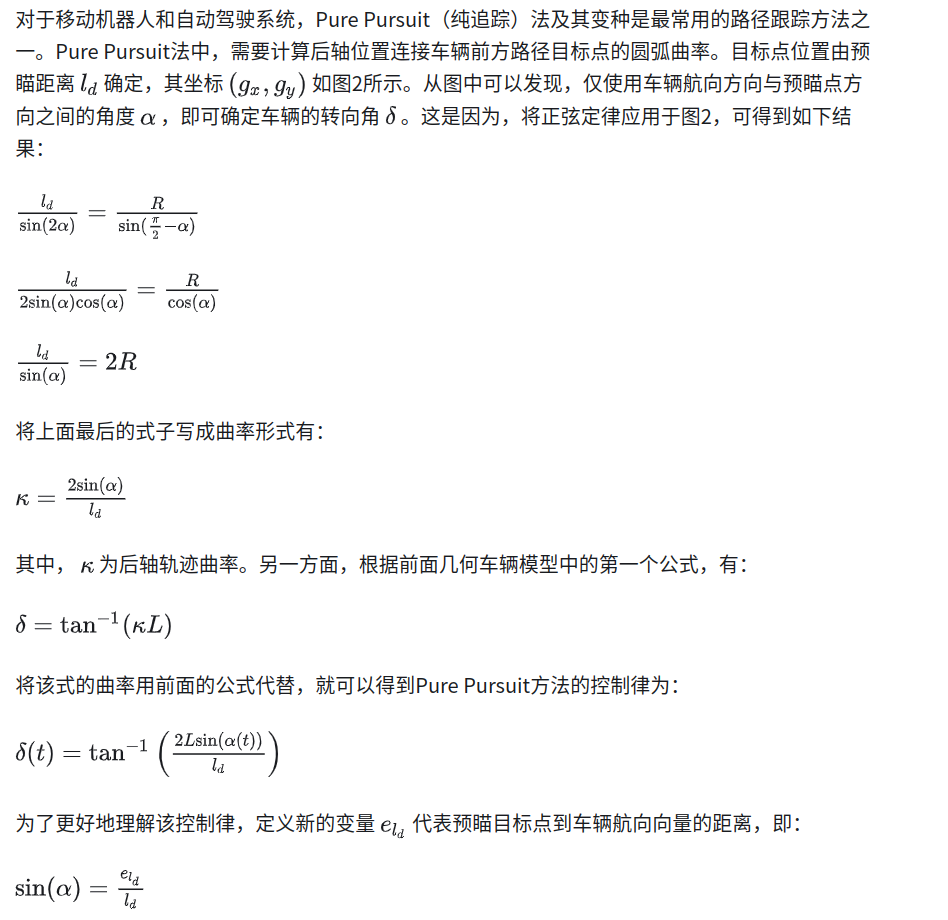
2. Pure Pursuit方法

图2 Pure Pursuit几何模型
则曲率公式可重写为:
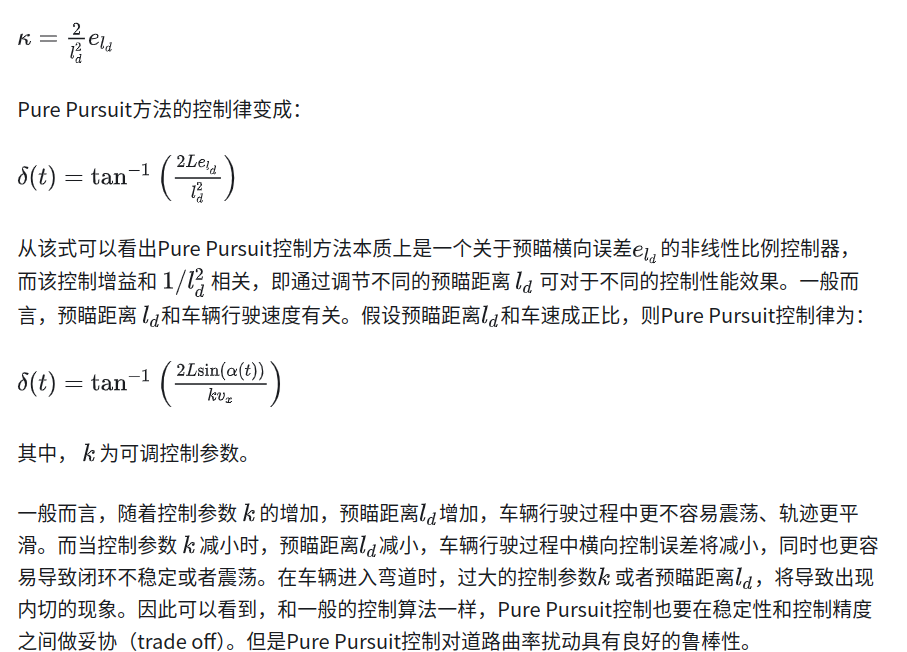
高速下转向曲率的快速变化易使车辆产生侧滑,系统模型与实际车辆特性相差较大会导致跟踪性能恶化,因此Pure Pursuit算法多适用于较低车速和小侧向加速度下的路径跟踪控制。
3. Stanley方法

图3 Stanley几何模型
















 1707
1707











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









