







CT成像的细节和清晰度依赖于运动控制系统对X射线进行控制定位,主要是使用伺服电机配合结构进行控制,一些电机厂家都有对应的控制器,比如科尔摩根、安川、步科、西门子等。
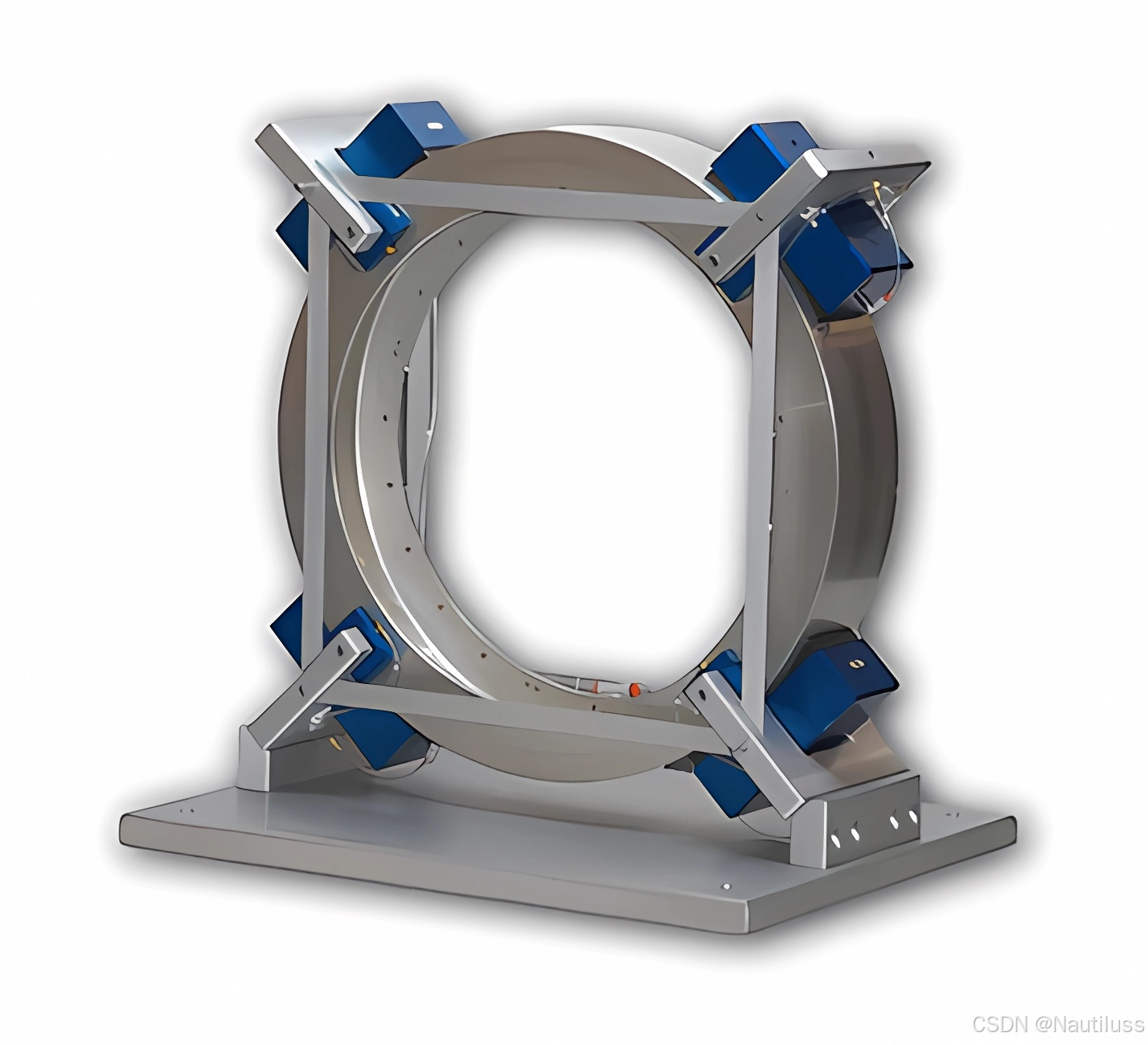
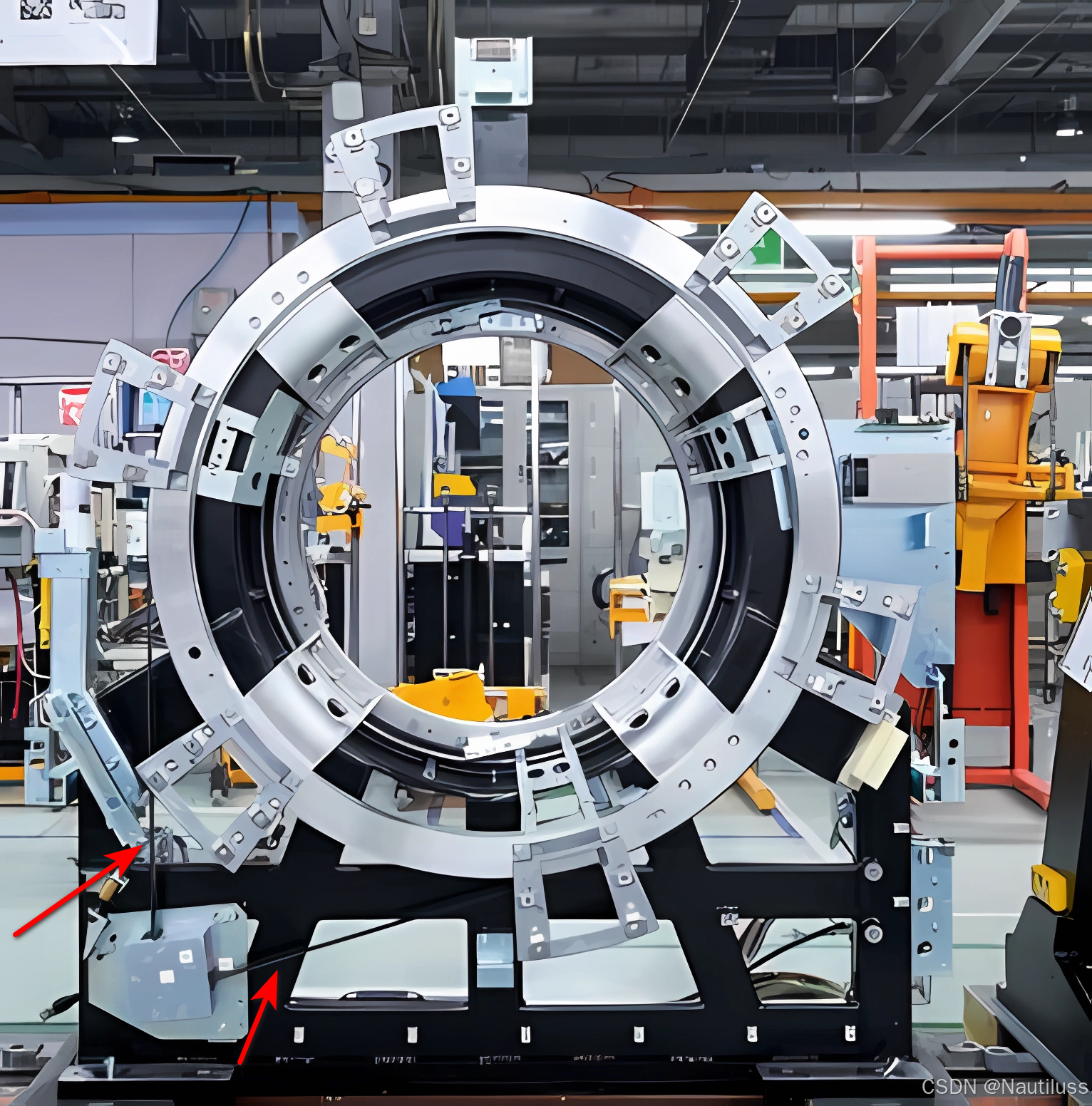
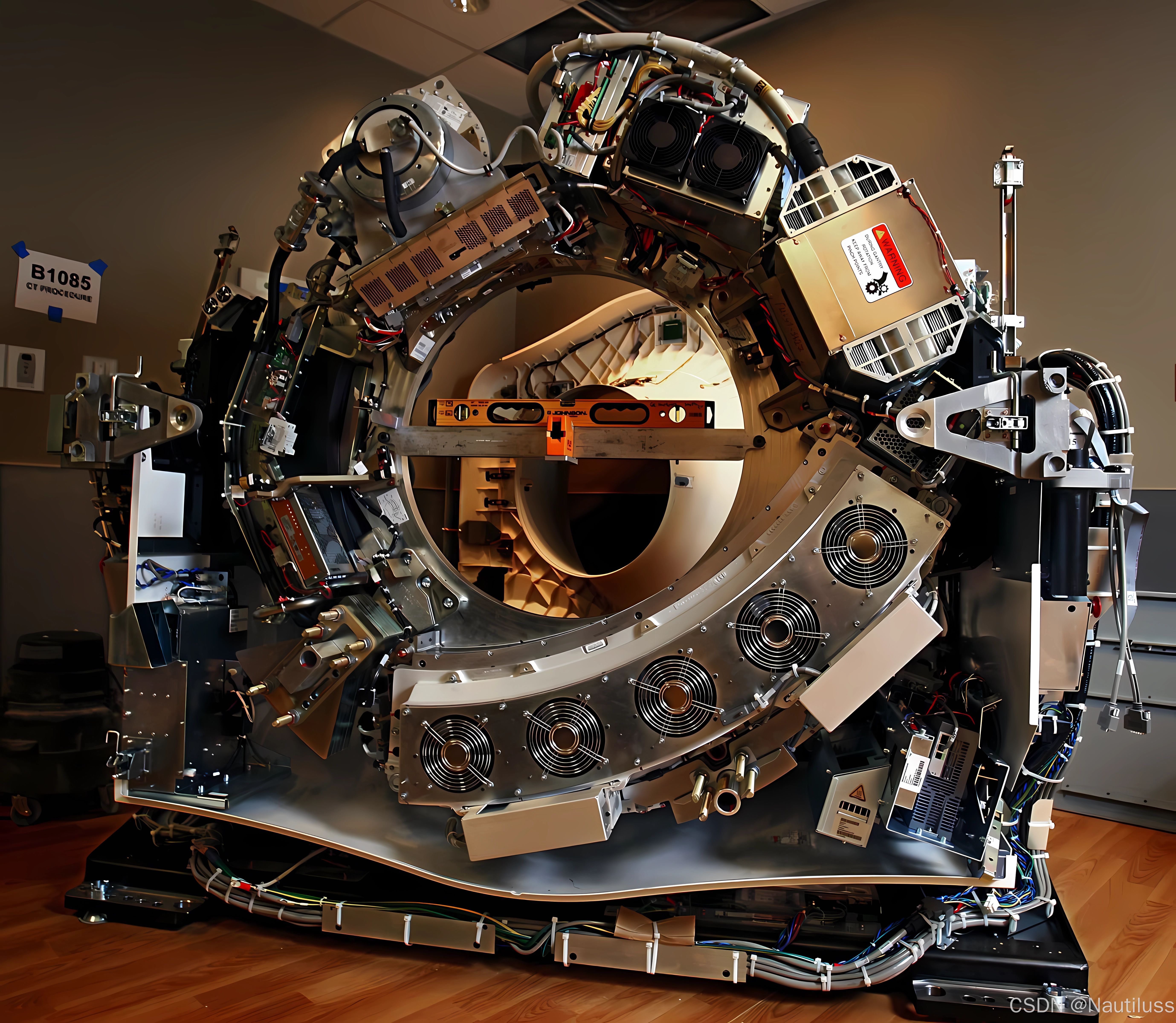
主骨架包括定子部分(Stationary)和转子部分(Rotar),二者之间依靠轴承(Bearing)链接在一起。其中,定子部分,即机架固定部分,机架控制电路、部分通讯电路、驱动电机、电源分配、倾角液压、通风等均位于定子;转子部分,即机架旋转部分,高压发生器、球管、探测器等影像链核及其辅助控制均位于转子。装在主骨架的高压、球管、探测器等零部件高达数百公斤,带着如此巨大的负载,仍然必须保持足够的角度精度和位置精度,实际临床应用要求的扫描层厚如今已为亚毫米级。
- 角度精度,在很高的转速下,机架依旧保持恒定旋转。
- 位置精度,在所有方向上,XYZ轴在高转速下,机架没有明显震动。
高转速带来的好处是毋庸质疑的,CT对其的追求始终没有停止过,尤其是2007年 RSNA以后,超高端CT百花齐放。比如,飞利浦的Air Glide气垫机架系统,其转速高达到0.272s/r,率先使CT转速进入了0.3秒以内;比如,西门子、佳能、GE、联影、东软、明峰、安科等品牌的高端CT均实现了0.2X的转速;还比如,GE最新的APEX平台已实现0.23s/r。不过,随着逼近0.2秒,转速提高带来好处的边际效应递减。运动器官追踪、深度学习等创新技术,也是提高动态器官成像能力的一种手段。
主轴承的核心技术在于材料学与加工精度,这直接决定了是否可以耐受高转速,以及在长时间使用后等中心ISO位置不偏移。CT轴承分为接触式滚珠轴承和非接触式气垫轴承,目前除飞利浦以外,均采取的是机械滚珠轴承。
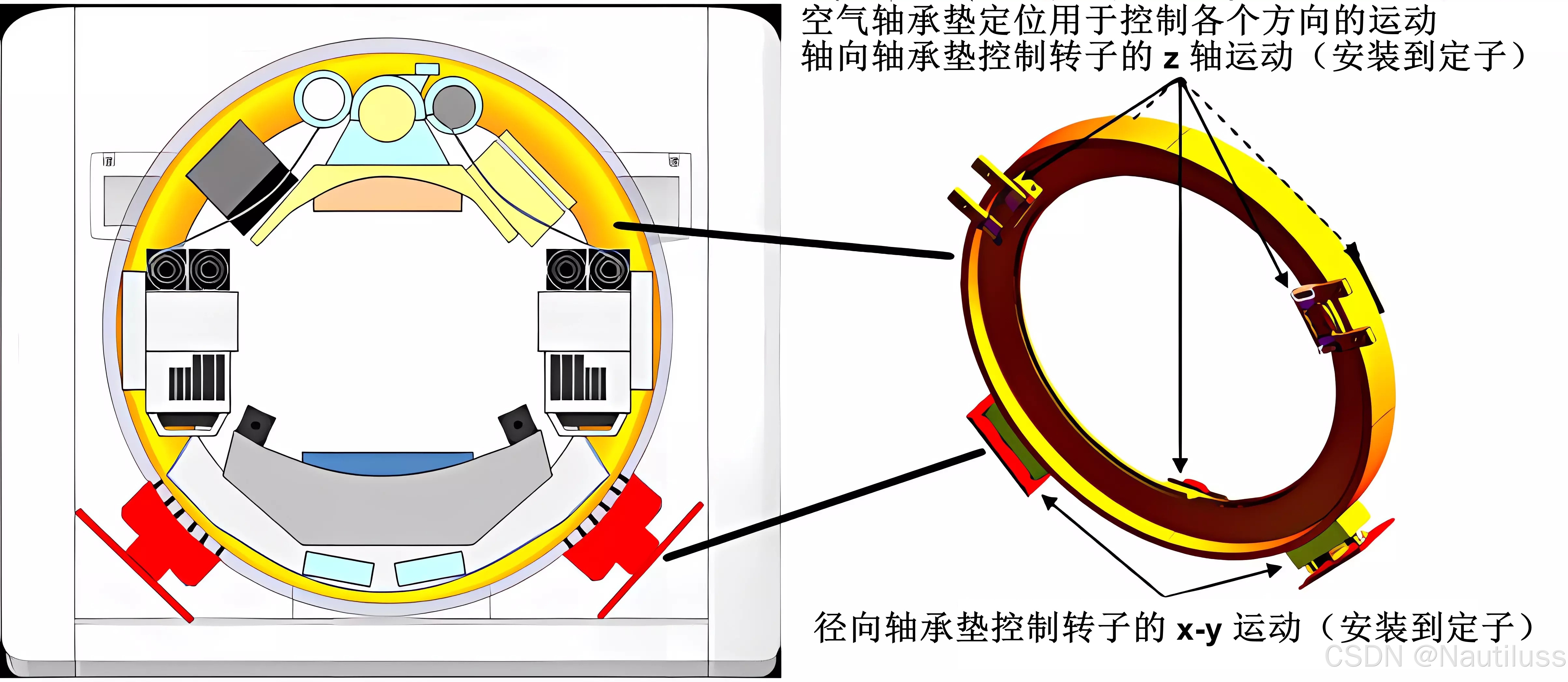
气垫轴承是一种成本很高的技术,需配备单独空气压缩机,使用高压空气将转子托举起来,使定子和转子之间有5微米的空隙,这使得摩擦力大大减小,从而支持超高转速。
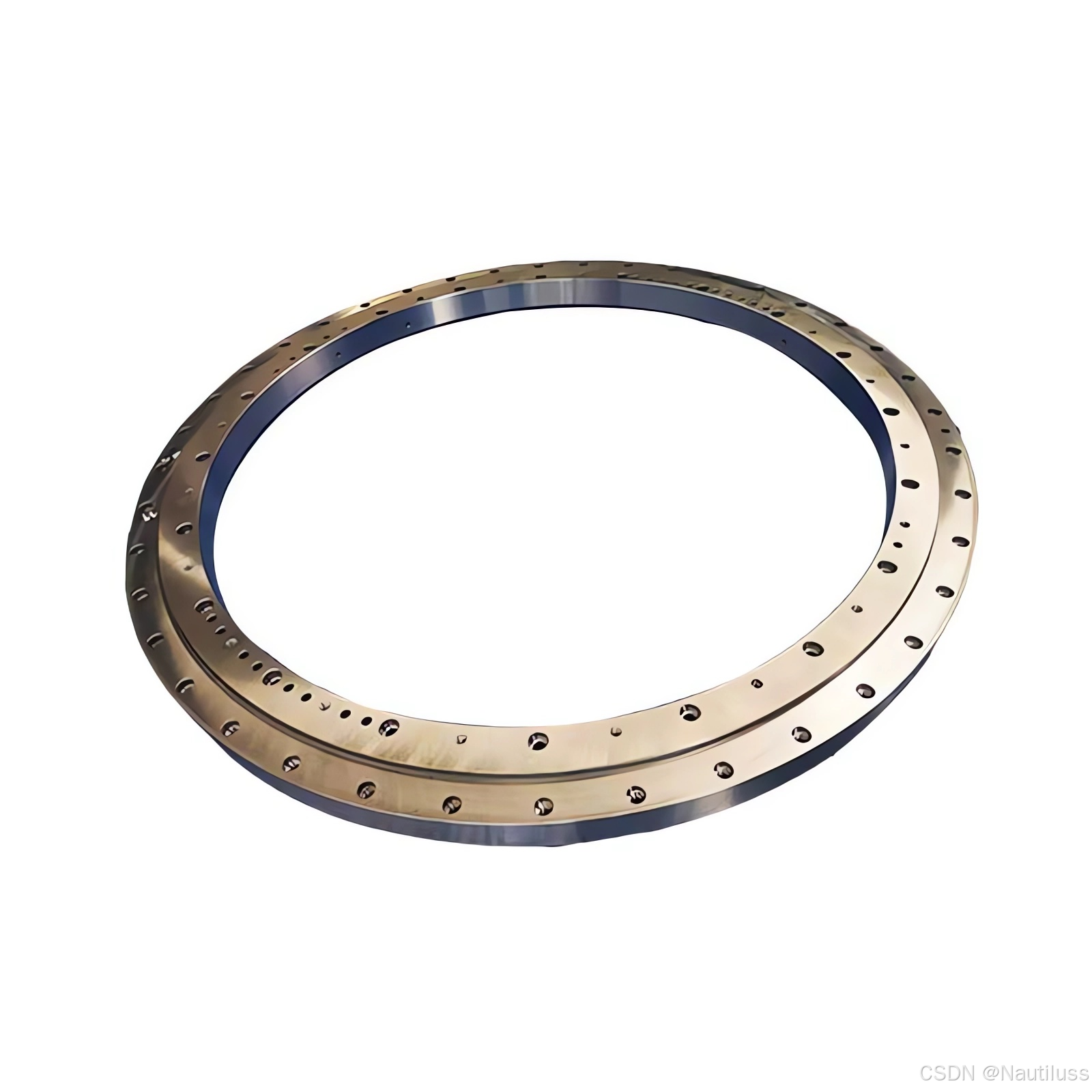
根据CT转速,目前包括第2代(60~90rpm,即1~0.67s/r)、第3代(120~180rpm,即0.5~0.33s/r)和第4代(240~300rpm,即0.25~0.2 s/r)主轴承,其中第3代CT机主轴承占据主要市场份额,而钢丝滚道轴承类型轴承是目前主导的主轴承结构。其第3代主轴承已有国产方案(洛阳LYC轴承有限公司);目前第4代主轴承仍主要依赖进口。
目前,CT的电机驱动方式主要包括数字钢带驱动和线性马达驱动两种。CT主机发出适当的脉冲信号驱动电机,电机带着钢带运动,钢带与CT轴承转子的外侧齿咬合,继而带动CT旋转。这一种是成本较低、但高度可靠的方式,其普遍支持的转速为1~0.35s/r,目前除超高端CT以外,绝大多数16-64排CT都在采用。
线性马达驱动(Liner Motor Drive),它摒弃钢带,将感应线圈埋设在转子的表面,在驱动和转动的能量传递上,驱动电机根据控制信号产生电磁斥力进行驱动,一般来讲,0.35 s/r以下的转速,都采用线性马达驱动,目前的超高端CT均采用这种技术。除了转速高优势外,其旋转所产生的噪音也会更小。
十几年来至今,超高端CT和部分64排CT在机架方面同属于一个系列,例如西门子Flash与AS+/Edge、飞利浦iCT与iCT sp、佳能Aquilion One与Prime、东软Epoch与Prime、联影uCT960+与uCT820等,这是基于历史沿革以及摊薄主要零部件成本考虑。
机架转速越快,离心力越大,这就特别考验随着转子高速旋转的重要零部件的耐受力,特别是球管,这是因为球管旋转阳极的轴承方向和离心力方向垂直,机架转速越大,球管轴承的承受的负荷就越大,这也就是为什么越高端的CT,其球管越容易损坏,尤其是机械滚珠轴承球管,在应用于医疗环境之前,所有组件都需要进行 4 倍机械过载测试。
机架转子上各个部件的合理布局十分重要,需反复对结构设计进行讨论和仿真,最终将众多部件巧妙配置,其位置、外形、重量都是轻易不调整的。假如换了新型的球管,就算其总重量没有变化,但是其质心还是会发生轻微移动,故转子上有很多地方可以增减配重块。机架静止时,对静平衡影响不大;但高速旋转时,则极有可能发生杨氏模量的偏心,导致轴承旋转过程中,每个方向受力不均。在更换转子上的大型部件(球管、高压、探测器等)后,必须要做动平衡测试,否则CT是不允许使用的。


















 1496
1496

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









