






改进A星算法+dwa
YID:7425674070722557
永带妹55

改进A星算法+dwa
A算法是一种常用于寻路问题的启发式搜索算法,其通过评估当前状态与目标状态之间的距离,选择最优路径来达到目标。然而,在某些特定情况下,传统的A算法存在一些限制,例如在处理动态环境或非确定性环境中的路径规划问题时,由于算法的静态启发式函数,可能会导致搜索结果不准确或不可行。为了克服这些限制,我们可以改进A*算法并结合动态窗口方法(DWA)来提高路径规划的性能。
首先,我们可以通过引入一个动态窗口来解决A算法在动态环境中的问题。传统的A算法在规划路径时,只考虑了起点和终点之间的最短路径,而没有考虑到动态环境中存在的障碍物。改进的A算法通过引入动态窗口,即以机器人当前速度和机器人能够保持的最大加速度为基础,动态地调整窗口大小,以适应环境中的障碍物。通过这种方式,改进后的A算法可以更好地处理动态环境中的路径规划问题,提高路径的准确性和可行性。
其次,我们可以结合动态窗口方法(DWA)来进一步提高路径规划的性能。DWA是一种基于模型的移动机器人轨迹规划方法,它通过预先定义一个机器人的动力学模型,并根据当前环境中的障碍物信息,计算出最优的机器人速度和角速度。将DWA与改进的A*算法结合起来,可以在路径规划的过程中考虑机器人的动力学特性和环境的动态变化,从而更加准确地规划出可行的路径。
为了实现改进的A*算法和DWA的结合,我们可以按照以下步骤进行操作:
-
建立环境地图:首先,我们需要根据实际场景建立一个环境地图,包括起点、终点以及其他障碍物的位置信息。这个环境地图将作为路径规划的基础。
-
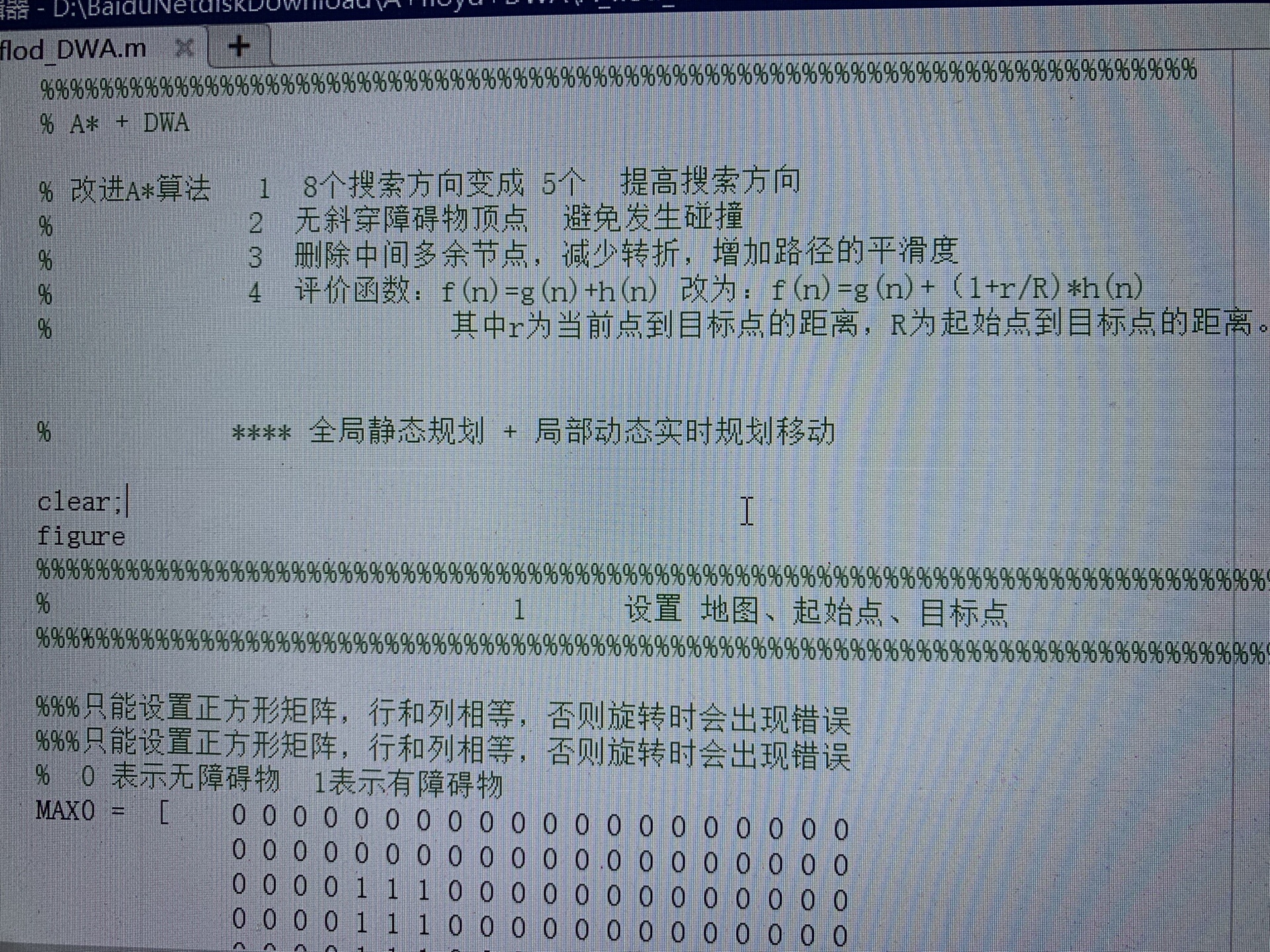
改进A算法:在传统A算法的基础上,引入动态窗口的概念。根据机器人的当前速度和最大加速度,动态地调整窗口的大小,以适应环境中的障碍物。通过改进后的A*算法,可以得到一条初始路径。
-
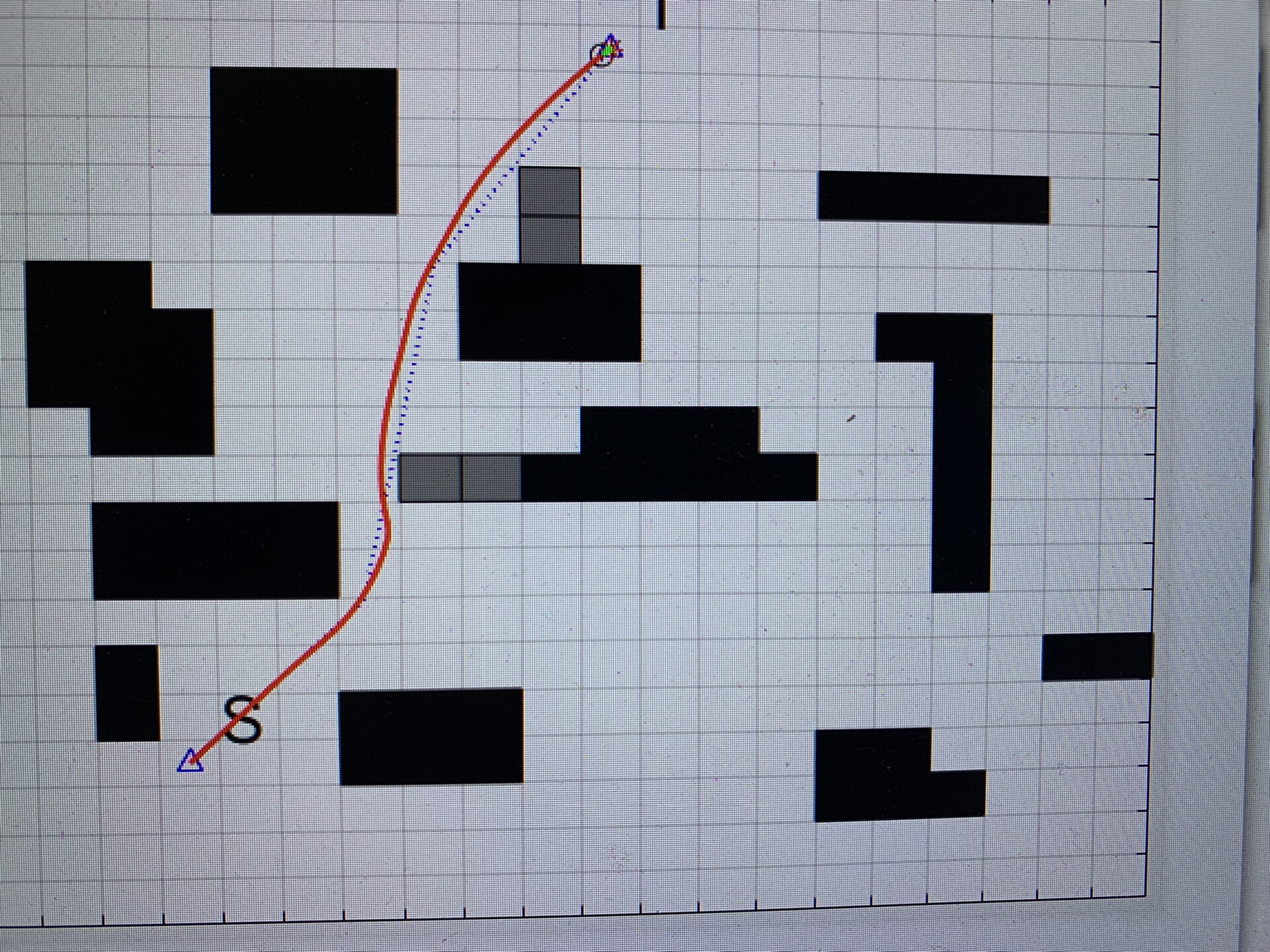
应用DWA方法:基于改进的A*算法得到的初始路径,结合机器人的动力学模型和环境的障碍物信息,计算机器人的最优速度和角速度。通过DWA方法,可以进一步优化路径规划的结果,使机器人在动态环境中能够更加灵活和高效地移动。
通过以上步骤,我们可以实现改进的A*算法和DWA的结合,从而提高路径规划的性能。在实际应用中,我们可以将该算法应用于机器人导航、无人驾驶等领域,以实现更加准确和可靠的路径规划。
总结起来,我们通过改进A算法并结合动态窗口方法,可以提高路径规划在动态环境中的准确性和可行性。这种方法可以适用于机器人导航、无人驾驶等领域,在实际应用中能够帮助机器人更加高效地完成路径规划任务。该算法的优化思想和实现步骤,对于研究者和工程师在路径规划领域具有一定的参考价值。未来,我们可以进一步研究改进A算法和DWA的应用场景,并结合更多的机器学习和深度学习方法,探索更加高效和智能的路径规划算法。
相关的代码,程序地址如下:http://coupd.cn/674070722557.html
















 1583
1583











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









