









ORBSLAM2初步探究&笔记本摄像头测试单目
笔记本摄像头ROS节点
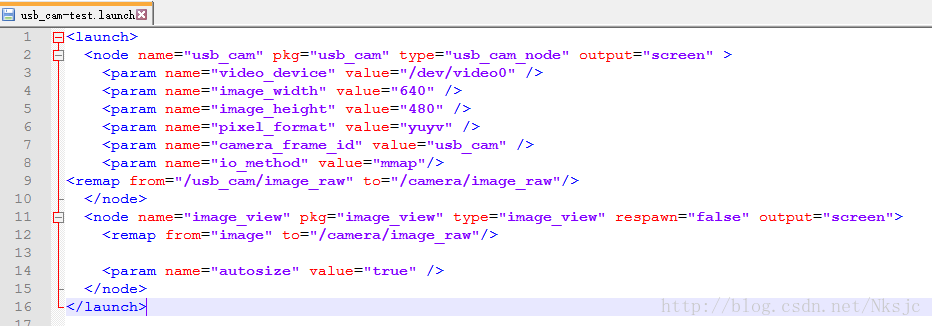
- 获取笔记本上摄像头ROS有开源的程序,详情见http://wiki.ros.org/usb_cam。为了之后在运行rosun ORB_SLAM2 Mono时的topic吻合。将launch文件改为:
此时发布的topic是/camera/image_raw - 摄像头标定采用http://wiki.ros.org/camera_calibration,编译安装后启动标定程序rosrun camera_calibration cameracalibrator.py –size 7x5 –square 0.03 image:=/camera/image_raw camera:=/usb_cam。其中7x5是棋盘格中内点数。
。尽量让标定板出现在摄像头视野的各个位置里,获得更好的标定结果。不断的移动标定板的位置,直到CALIBRATE按钮使能,标定完成。
ORB_SLAM2编译安装使用。
开源程序地址https://github.com/raulmur/ORB_SLAM2。编译参见readme的说明。 首先安装Pangolin
cd Pangolin
mkdir build
cd build
cmake ..
make -j
sudo make install。
还需要OpenCV&Eigen3cd ORB_SLAM2
chmod +x build.sh
./build.shROS 节点编译:
export ROS_PACKAGE_PATH=${ROS_PACKAGE_PATH}:PATH/ORB_SLAM2/Examples/ROS.
chmod +x build_ros.sh
./build_ros.sh
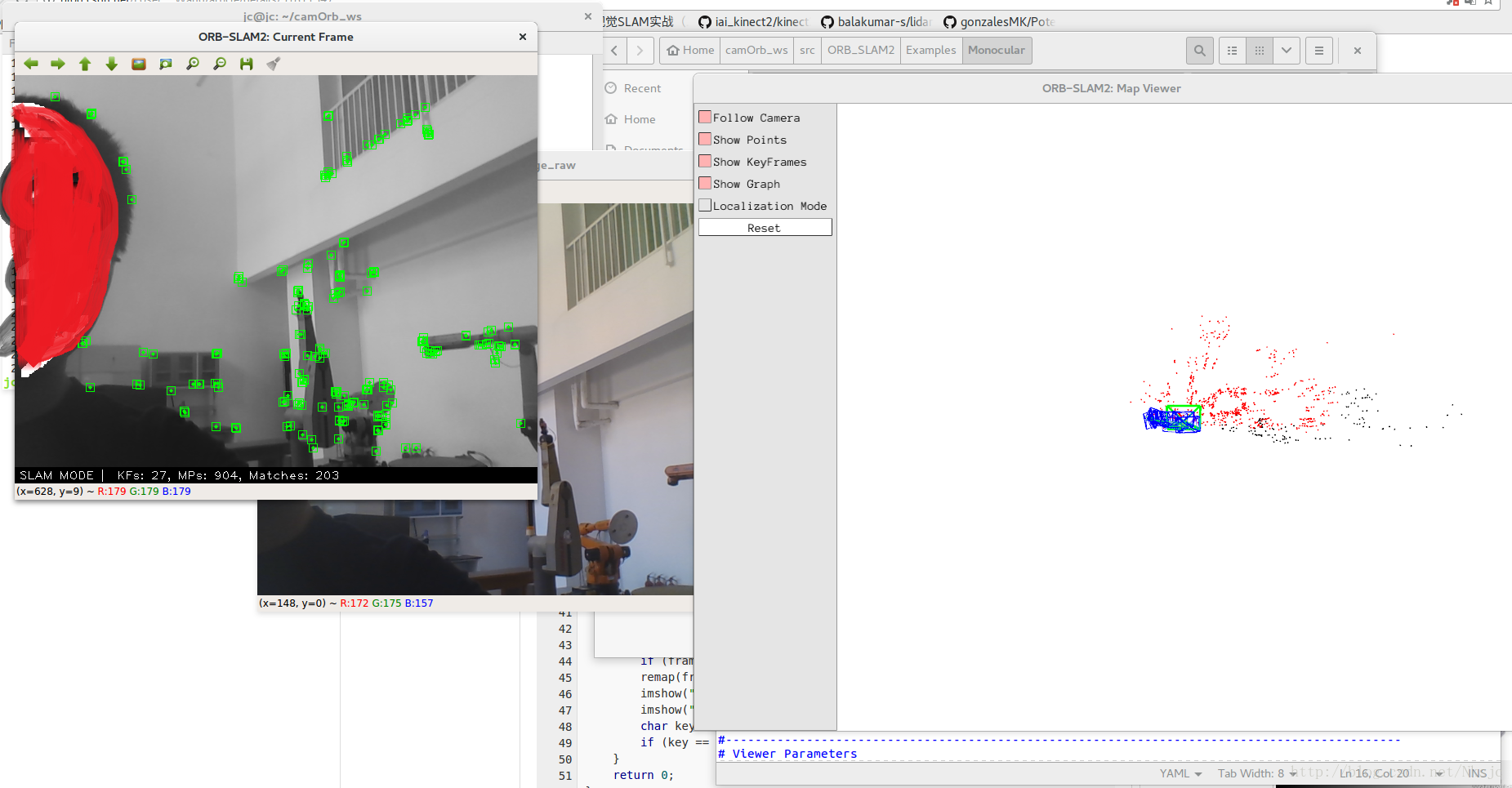
编译完成后 rosrun ORB_SLAM2 Mono PATH_TO_VOCABULARY PATH_TO_SETTINGS_FILE。配合笔记本摄像头完成初步工作。PATH_TO_SETTINGS_FILE中的数据按照笔记本摄像头标定结果修改。














 877
877











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









