






智能车辆路径跟踪控制:纯跟踪控制与Stanley控制算法,其他线相关算法。
主要是MATLAB程序,可以根据需要的路径进行跟踪
ID:6920649147612984
霸天虎1999


智能车辆路径跟踪控制一直是自动驾驶领域的重要研究方向之一。在智能车辆行驶过程中,路径跟踪控制的准确性和稳定性直接关系到整个系统的安全性与效率。本文将围绕纯跟踪控制与Stanley控制算法以及其他线相关算法展开介绍,并通过MATLAB程序进行路径跟踪。
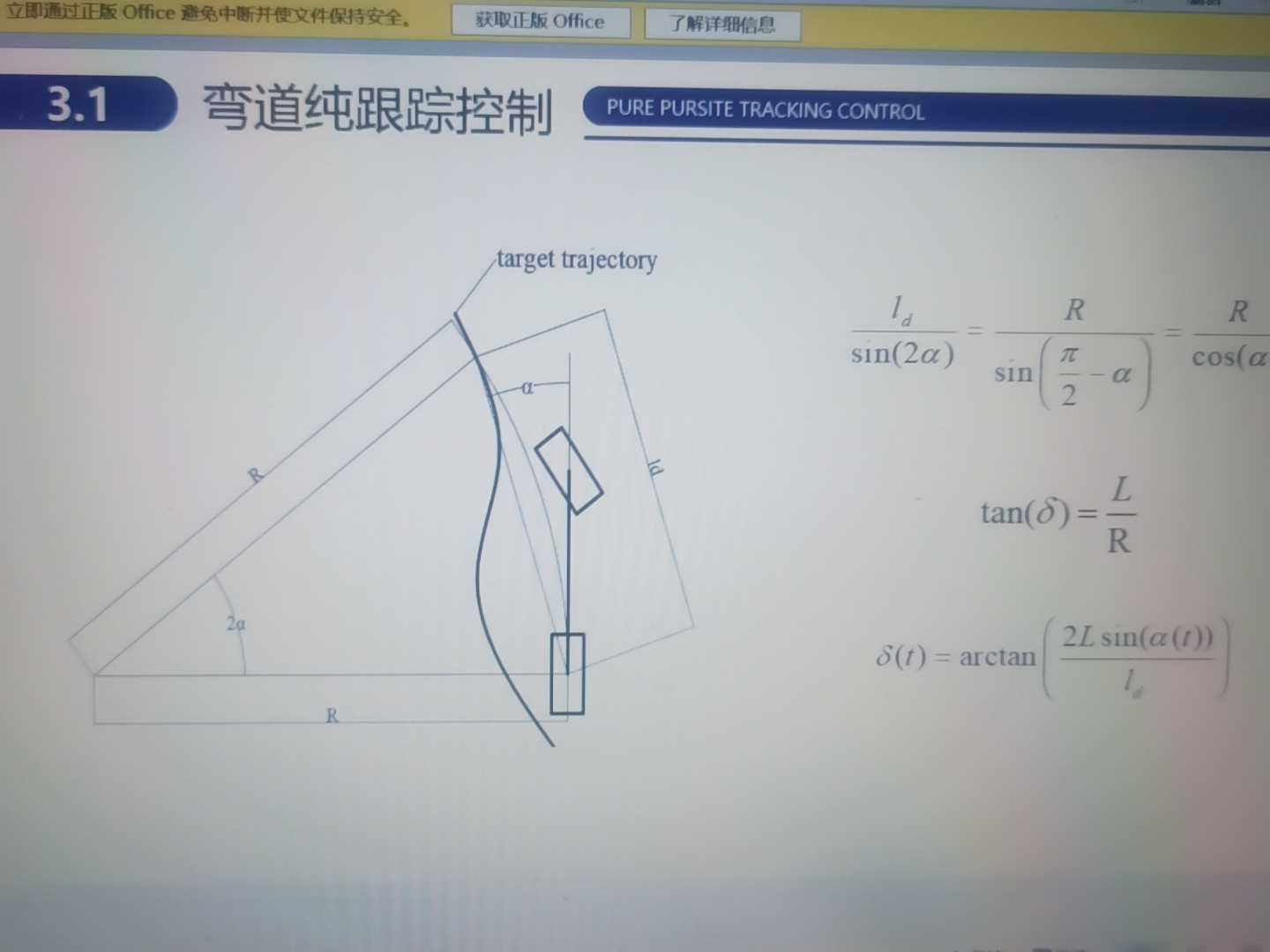
首先,我们来介绍纯跟踪控制算法。纯跟踪控制算法是一种基于车辆当前位置和目标路径的控制方法,旨在使车辆保持在预定义的路径上。该算法主要通过计算车辆与目标路径之间的横向偏差和角度偏差,进而生成相应的控制指令,使车辆能够沿着预定路径稳定行驶。纯跟踪控制算法在实际应用中具有计算简单、鲁棒性好以及对系统动态响应要求低等特点,因此在智能车辆的路径跟踪中得到了广泛应用。
随后,我们将介绍Stanley控制算法。Stanley控制算法是一种基于纯跟踪控制算法的增强型方法,通过结合车辆当前位置与目标路径之间的横向偏差和角度偏差以及车辆与目标路径之间的横向误差,进一步提升路径跟踪的准确性和稳定性。Stanley控制算法通过建立车辆与目标路径之间的状态空间模型,将控制指令分解为横向偏差和角度偏差的组合,从而实现了更加精确的路径跟踪效果。通过引入Stanley控制算法,在智能车辆的路径跟踪过程中可以更好地适应复杂的交通场景,提高车辆的安全性和稳定性。
除了纯跟踪控制和Stanley控制算法外,还有其他多种相关算法可以用于智能车辆的路径跟踪。例如,基于PID控制的路径跟踪算法、基于模糊逻辑控制的路径跟踪算法等。这些算法在不同的应用场景下,具有各自的优缺点和适用性。研究者可以根据具体需求选择合适的算法进行实验和应用。
在具体实现上,本文采用MATLAB进行路径跟踪算法的编程。MATLAB是一种强大的数学计算和仿真分析工具,具有丰富的算法库和直观的编程界面,非常适用于智能车辆路径跟踪的实验和验证。通过编写相关的程序,我们可以根据需要的路径进行跟踪,并对算法的效果进行评估和优化。
综上所述,智能车辆路径跟踪控制是一个非常重要的研究方向。本文围绕纯跟踪控制与Stanley控制算法以及其他线相关算法展开介绍,通过MATLAB程序进行路径跟踪。通过研究和实验,我们可以不断提升智能车辆路径跟踪的准确性和稳定性,为自动驾驶技术的发展做出贡献。
(以上文字为示例,仅供参考。请根据实际情况进行调整和修改)
以上相关代码,程序地址:http://matup.cn/649147612984.html















 483
483

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









