






资源
https://www.bilibili.com/video/BV1ku411G7UR?
学习过程中存在bug,记录一下
1
Q:"package ‘joint_state_publisher_gui’ not found, searching: ['/home
A:
sudo apt install ros-humble-joint-state-publisher
2
https://fishros.org.cn/forum/topic/2417/ros2_control%E8%BF%9B%E8%A1%8C%E5%88%B0launch%E6%97%B6%E6%97%A0%E6%B3%95%E8%BF%90%E8%A1%8C/8
安装依赖项目 :https://control.ros.org/humble/doc/getting_started/getting_started.html
Q:[ERROR] [launch]: Caught exception in launch (see debug for traceback): executable ‘[<launch.substitutions.text_substitution.TextSubstitution object at 0x7feb0aeda440>]’ not found on the PATH
‘[<launch.substitutions.text_substitution.TextSubstitution object at 0x7f53ceac2440>]’ not found on the PATH
A:
rosdep update --rosdistro=$ROS_DISTRO
sudo apt-get update
rosdep install --from-paths src --ignore-src -r -y
https://answers.ros.org/question/412213/ros2-launch-gives-an-error-in-ros2_control_demos/
另一个小bug:
sudo apt-get update ✔ │ 10s │ base 🐍 │ 14:11:06
正在读取软件包列表… 完成
E: 无法获得锁 /var/lib/apt/lists/lock。锁正由进程 1571(packagekitd)持有
N: 请注意,直接移除锁文件不一定是合适的解决方案,且可能损坏您的系统。
E: 无法对目录 /var/lib/apt/lists/ 加锁
A: sudo kill 1571
在相应文件夹下安装:
rosdep install --from-paths src --ignore-src -r -y
executing command [sudo -H apt-get install -y ros-humble-xacro]
运行成功!
3
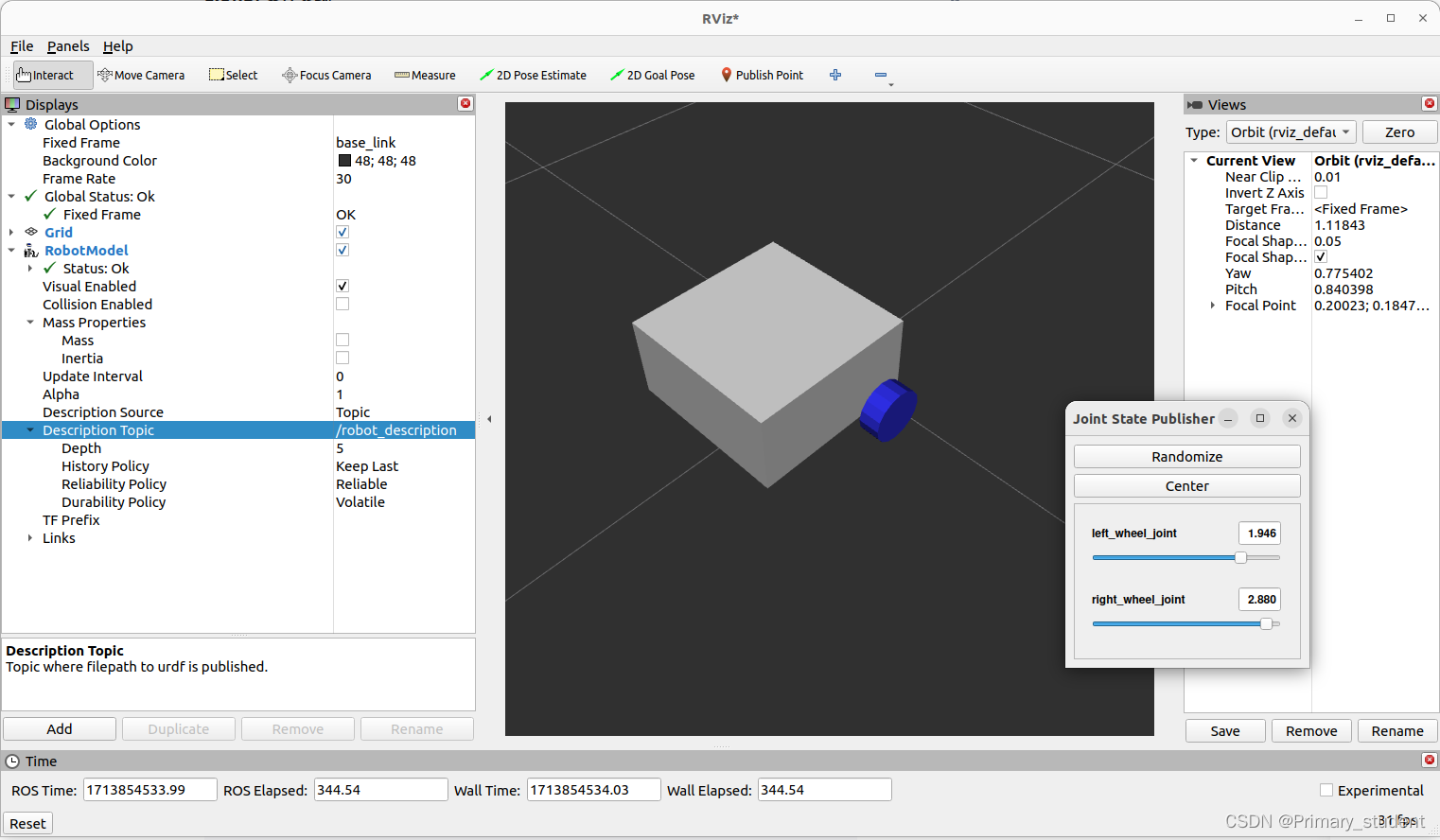
rviz中的模型不显示
农村__大叔
你这坐标系也不对
机器人robot—description插件也没添加
1.坐标系map–改成 base_link
2.在rviz左下角add打开添加robot_description组件
3.添加后在rviz左面看到robot_description 里面的topic设置成/robot_description
运行成功但是没有模型,参考https://zhuanlan.zhihu.com/p/664829955
逐步设置成功显示















 842
842











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









