






第一个问题版本对应错误。 以下命令是Ubuntu16.0。
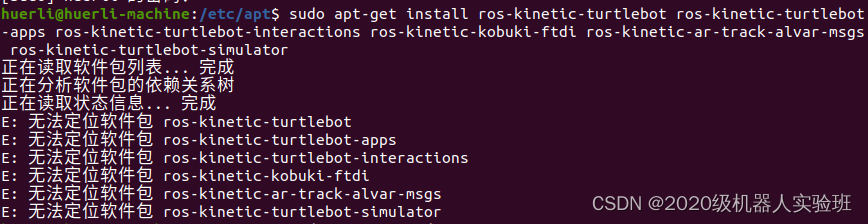
Ubuntu20.0需要使用以下命令
sudo apt-get install ros-noetic-turtlebot-*
可以在中端看到以下的东西,就是安装的内容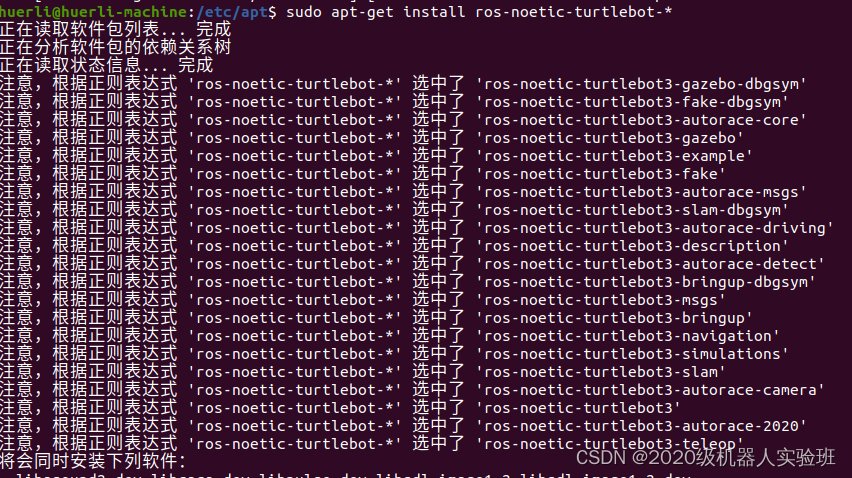
安装完成之后我们可以在 /opt/ros/noetic 下找到我们安装的 .launch 的文件,turtlebot3和turtlebot 的 *.launch 的文件名称不一样,所以不能直接通用。
直接输入就会出现以下问题。
所以我们需要在该目录下寻找类似的文件。
替换的命令如下所示,但是在使用这个命令
roslaunch turtlebot3_gazebo turtlebot3_world.launch
直接输入会出现以下问题,提示是TURTLEBOT3_MODEL没有设置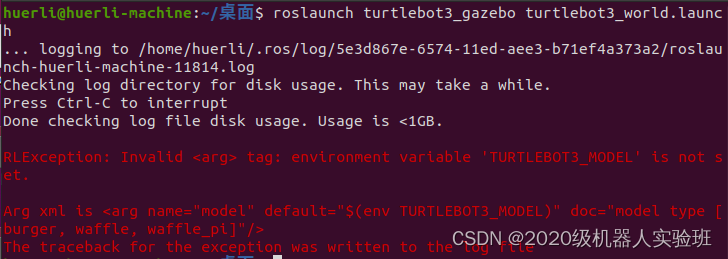 如果是找不到命令建议source一下,再设置TURTLEBOT3_MODEL
如果是找不到命令建议source一下,再设置TURTLEBOT3_MODEL
source /opt/ros/noetic/setup.bash
export TURTLEBOT3_MODEL=waffle_pi
roslaunch turtlebot3_teleop turtlebot3_teleop_key.launch















 1011
1011











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









