






机械臂运动控制:空间直线、圆弧及圆插补算法详解
一、引言
在工业自动化、机器人技术及精密制造等领域,机械臂的应用日益广泛。为了实现机械臂的精确运动控制,正逆运动学解析解、空间直线和圆弧插补算法以及基于Slerp、Nlerp算法的姿态插补技术显得尤为重要。本文将详细介绍这些算法的实现及原理。
二、正逆运动学解析解
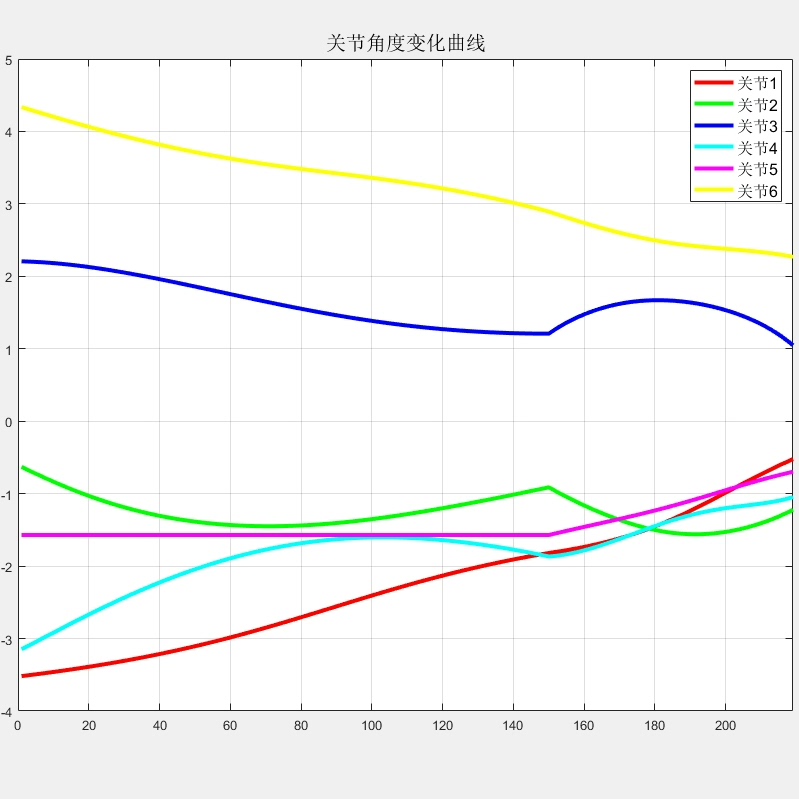
正运动学解析解主要用于根据关节角度计算机械臂末端的位置和姿态。而逆运动学解析解则是根据给定的末端位置和姿态,计算关节的角度。这两种解析解是机械臂运动控制的基础。
三、空间直线插补
空间直线插补算法用于在两个点之间生成平滑的直线运动路径。该算法通过计算一系列的中间点,使得机械臂能够按照这些点顺序移动,从而实现从起点到终点的直线运动。
四、空间圆弧插补
空间圆弧插补算法用于生成机械臂在空间中绘制圆弧的运动路径。该算法考虑了机械臂的空间姿态和运动范围,通过计算圆弧上的一系列点,使机械臂能够按照这些点顺序移动,从而绘制出所需的圆弧。
五、空间圆插补
空间圆插补算法用于在两个姿态之间进行平滑的过渡。与直线和圆弧插补不同,姿态插补需要考虑四元数或欧拉角等表示方法。基于Slerp(球面线性插值)或Nlerp(归一化四元数线性插值)算法,可以实现机械臂末端在两个姿态之间的平滑过渡。
六、基于Slerp、Nlerp算法的机械臂末端两姿态插补算法
Slerp和Nlerp算法是用于计算两个姿态之间平滑过渡的算法。Slerp基于四元数的球面插值,能够得到两个姿态之间的最优插值结果。Nlerp则是一种归一化的四元数插值方法,同样可以用于实现姿态的平滑过渡。这两种算法都可以应用于机械臂的末端姿态插补,使得机械臂能够在两个姿态之间进行平滑切换。
七、代码与文档说明
- 代码:所提供的代码均为个人手写,已包含必要的注释,方便理解和维护。代码包含了正逆运动学解析解、空间直线、圆弧及圆插补算法的实现。
- 文档:附带了运动学建模推理文档、空间圆弧插补原理推导文档以及基于单位四元数的姿态插补文档。这些文档详细解释了算法的原理和实现过程,是理解和使用代码的重要参考资料。
八、总结
本文详细介绍了机械臂运动控制中的正逆运动学解析解、空间直线、圆弧及圆插补算法的实现原理和过程。这些算法是实现机械臂精确运动控制的关键技术,对于提高机械臂的自动化程度和精度具有重要意义。通过使用本文所提供的代码和文档,用户可以方便地实现机械臂的运动控制,从而实现各种复杂的任务需求。
【机械臂空间直线&圆弧&圆插补】
代码主要功能:
- 正逆运动学解析解;
- 空间直线、圆弧以及圆插补;
- 基于Slerp、Nlerp算法的机械臂末端两姿态插补算法;
- 机械臂空间直线、圆弧以及圆插补。
购前须知: - 代码均为个人手写,已经包含必要的注释;
- 附运动学建模推理文档、空间圆弧插补原理推导文档以及基于单位四元数的姿态插补文档;


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









