







 本文详细探讨了伺服驱动装置的关键要素,包括精确控制、快速响应、不同类型如伺服电机、控制器和传感器,以及高精度、稳定性和实时性要求。同时涵盖了伺服电机、步进电机的工作原理和控制技术,以及PLC编程在实际应用中的例子。
本文详细探讨了伺服驱动装置的关键要素,包括精确控制、快速响应、不同类型如伺服电机、控制器和传感器,以及高精度、稳定性和实时性要求。同时涵盖了伺服电机、步进电机的工作原理和控制技术,以及PLC编程在实际应用中的例子。
一、伺服驱动装置
1. 任务
- 精确控制:伺服驱动装置的首要任务是实现对机械系统的精确控制,包括位置、速度、加速度等参数的精准调节和控制。
- 快速响应:具备快速响应能力,能够在短时间内实现目标位置或速度的调整。
- 稳定性:保持系统运行稳定,防止震动、振动等不稳定因素影响系统性能。
2.类型
- 伺服电机:常用伺服电机作为驱动源,包括伺服直流电机和交流伺服电机等。
- 伺服控制器:用于控制伺服电机的位置、速度和力矩等,其中包括PID控制器、模糊控制器等不同类型的控制器。
- 传感器:用于反馈系统状态信息,如位置传感器、编码器等,以确保系统实时监测和控制。
3.基本要求
- 高精度性:能够实现高精度的位置控制和运动控制,满足系统对位置、速度、力矩等参数的精确要求。
- 快速响应性:具备快速响应能力,能够在短时间内对系统进行调整和响应,实现快速稳定的控制。
- 稳定性和可靠性:保持系统运行的稳定性,防止外界干扰或系统内部问题导致系统失控或故障。
- 实时性:具备实时监测和控制的能力,能够及时调整系统参数以应对外部环境变化和工作要求的变化。
二、伺服驱动装置的执行元件
1.类型
- 伺服电机:常见的伺服电机类型包括直流伺服电机和交流伺服电机。
- 执行器:如液压执行器、气动执行器等,用于将电能转换为机械运动。
2.特点
- 高精度性:能够实现高精度的位置控制和运动控制。
- 快速响应性:具备快速响应能力,能够在短时间内对系统进行调整和响应。
- 可编程性:可以通过编程实现各种复杂的运动轨迹和控制逻辑。
- 稳定性和可靠性:保持系统运行的稳定性,防止外界干扰或系统内部问题导致系统失控或故障。
- 多功能性:可以实现多种运动模式和控制方式,如位置控制、速度控制、力控制等。
3.应用
- 工业自动化:用于自动化生产线上的各种定位、装配、搬运等操作。
- 机器人控制:作为机器人关节驱动装置,实现机器人的精确运动和灵活控制。
- 数控机床:用于控制数控机床上的各种运动轴,实现复杂加工工艺的精确控制。
- 航空航天:用于飞行器的姿态控制、舵面控制等精密控制任务。
- 医疗设备:如手术机器人、影像设备中的运动控制等。
三、伺服驱动装置的相关设计
1.方案设计
- 需求分析:明确系统的功能需求和性能指标,包括所需的精度、速度、负载等。
- 选型:根据需求选择合适的伺服电机、控制器和传感器等元件,并设计相应的机械结构和传动系统。
- 系统架构设计:确定伺服系统的整体结构和各个部件之间的连接方式,包括电气连接、通讯协议等。
- 控制策略设计:选择合适的控制算法和参数,如PID控制、模糊控制等,以实现对系统的精确控制。
2.系统稳态设计
- 稳定性分析:通过数学建模和仿真分析,评估系统的稳定性,并优化系统结构和参数以提高稳定性。
- 防振设计:采取措施减小系统的振动和震动,如优化机械结构、增加阻尼器等。
- 电气保护设计:设计电路保护措施,防止电气部件因电压浪涌、过载等问题而损坏。
3.动态设计
- 响应速度优化:通过优化控制算法和参数,提高系统的响应速度,减少调整时间。
- 动态性能评估:对系统进行动态性能测试和仿真,评估系统在不同工况下的动态性能,并根据测试结果进行调整和优化。
- 负载适应性设计:考虑系统在不同负载条件下的性能表现,设计相应的负载适应性控制策略。
四、步进电机
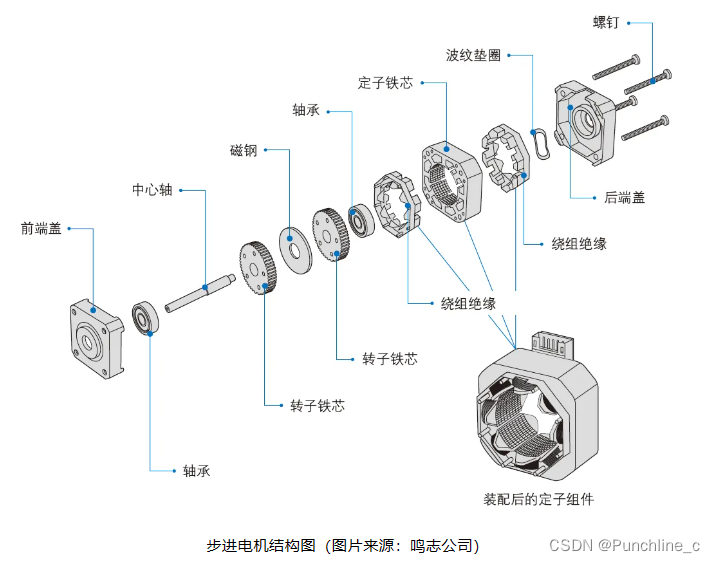
1.结构
- 步进电机通常由定子、转子、端部支架、轴承和端部盖等部件组成。定子由电磁线圈和磁铁组成,而转子则由磁性材料制成。根据不同的结构类型,步进电机可分为单相步进电机、双相步进电机和多相步进电机。
2.工作原理
- 基于电磁学原理,其转子上的磁性材料受到定子电磁线圈的磁场作用,从而产生一定的磁矩。通过依次激活不同的线圈,使得转子顺序转动,从而实现步进运动。步进电机的每一步运动对应着一个固定的角度,称为步距角。
3.控制方式
- 开环控制:根据事先确定好的步序和步距,以固定的速度或脉冲频率控制步进电机转动,无反馈系统。
- 闭环控制:在开环控制的基础上增加了位置反馈系统,可以实现更精确的位置控制和运动控制,提高了系统的稳定性和精度。
五、伺服电机
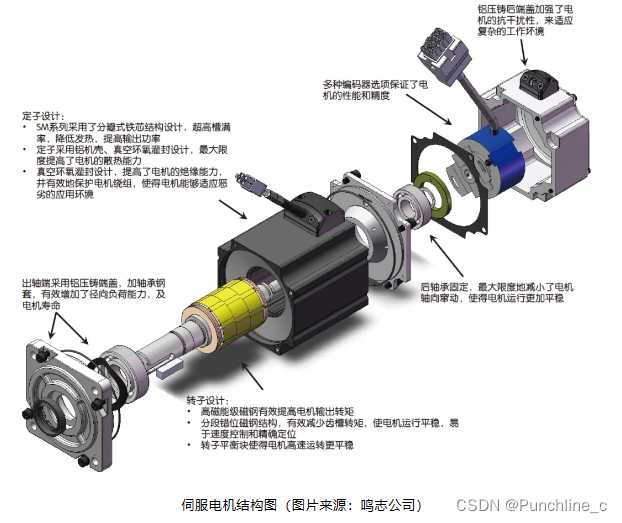
1.结构
- 伺服电机的结构类似于普通电机,通常由转子、定子、轴承等组成。与普通电机不同的是,伺服电机配备了编码器或其他位置传感器,并且通常配合伺服控制器使用。
2.工作原理
- 伺服电机的工作原理是通过控制系统精确地调节电机的转子位置、速度和力矩,以实现对机械系统的精准控制。控制系统通过接收来自编码器或其他传感器的反馈信息,与设定的目标值进行比较,并根据差值调整电机的控制信号,使其达到预期的运动状态。
3.控制方式
- 位置控制:根据预先设定的位置目标,控制电机精确地移动到目标位置。
- 速度控制:控制电机达到预期的转速。
- 力矩控制:控制电机输出的力矩大小。
六、控制技术
1.控制装置的组成、分类
-
组成:控制装置通常由控制器(包括硬件和软件)、执行元件和传感器组成。控制器负责接收输入信号、进行处理,并输出控制信号,执行元件则根据控制信号执行相应的动作,传感器则用于采集系统的反馈信息。
-
分类:
- 根据控制方式分类:包括开环控制和闭环控制。开环控制指没有反馈系统的控制方式,闭环控制则包括了反馈系统,能够根据系统反馈信息进行调节。
- 根据控制对象分类:包括连续控制和离散控制。连续控制是指对连续变化的控制对象进行控制,如温度、压力等;离散控制则是针对离散事件进行控制,如开关控制、步进控制
2.控制系统的数学模型建立
-
连续系统模型:连续系统可以用微分方程或传递函数描述,通常采用微分方程建模,如常微分方程、偏微分方程等。
-
离散系统模型:离散系统可以用差分方程或差分方程组描述,通常用于描述数字控制系统。
3.控制系统的过渡过程
控制系统的过渡过程是指系统从初始状态到稳态的过程,通常包括以下指标:
-
超调量:过渡过程中输出信号超过稳态值的最大百分比。
-
调节时间:系统从开始响应到稳定在稳态值附近的时间。
-
上升时间:系统从初始状态到达稳态值的时间。
-
稳态误差:过渡过程结束时系统输出与期望输出之间的差值。
4.控制系统的性能指标
控制系统的性能指标反映了系统的稳定性、准确性和响应速度等方面:
-
稳定性:系统稳定性指系统在受到扰动或参数变化时能否保持稳定,通常通过系统的极点位置和频率响应来评估。
-
准确性:系统准确性指系统输出与期望输出之间的偏差,包括稳态误差和动态误差。
-
灵敏度:系统对参数变化或外部干扰的敏感程度,灵敏度越低表示系统对干扰的抵抗能力越强。
-
稳定裕度:系统稳定性的保证程度,通常用相对稳定度、相位裕度等指标来评估系统的稳定性。
5.PLC编程方法及实例分析
-
PLC编程方法:PLC编程主要采用 ladder diagram(梯形图)或者类似的编程语言进行。编程的基本原理是根据控制逻辑和条件设置,将输入信号经过逻辑处理后得到输出信号,从而实现对执行元件的控制。
-
实例分析:以自动化生产线的控制为例,可以利用PLC编程实现对生产线上各个设备的控制和协调。比如,通过采集传感器信号,PLC可以判断物料是否到位,然后控制电机启停、气缸动作等,实现自动化生产流程。

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









