







YOLOv11交通信号灯识别检测项目扩展
交通信号灯识别是计算机视觉领域中的一个重要应用场景,广泛应用于自动驾驶、智能交通管理等领域。YOLOv11作为一种高效的目标检测算法,因其速度快、精度高的特点,非常适合用于交通信号灯的识别与检测。以下是对YOLOv11交通信号灯识别检测项目的详细扩展说明。

数据集配置
从你的配置文件来看,数据集的路径和类别信息已经基本定义清楚:
• 数据集根目录:path: light/
• train: 训练集路径,指向 light/train/images,包含4张图片。
• val: 验证集路径,指向 light/val/images,包含4张图片。
• test: 测试集路径未定义(可选)。
• 类别数量:nc: 4,表示数据集中有4个类别。
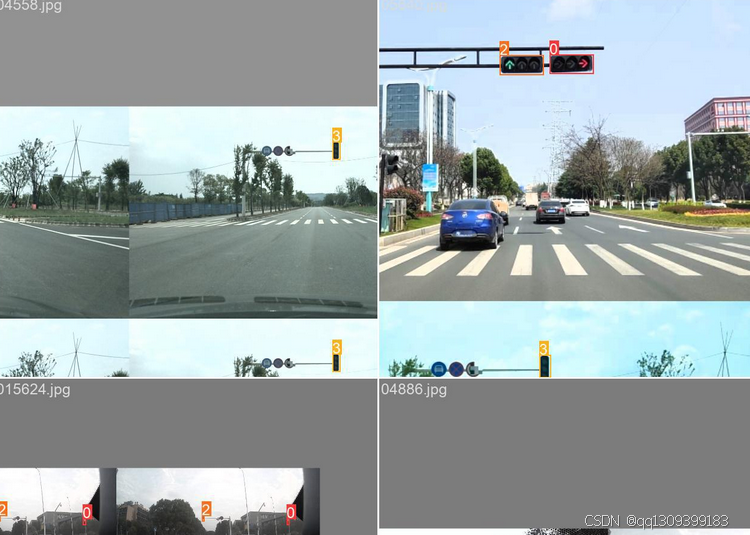
• 类别名称:
• Traffic Light-Red Light:红灯。
• Traffic Light-Yellow Light:黄灯。
• Traffic Light-Green Light:绿灯。
• Traffic Light-Off:信号灯熄灭状态。
从配置来看,这是一个小规模数据集,仅包含4张图片。为了训练一个高性能的YOLOv11模型,数据集的规模和多样性需要进一步扩展。
数据集扩展建议
-
数据收集:
• 收集更多交通信号灯的图片,建议从公开数据集中获取,例如:
◦ [KITTI 数据集](:包含多种交通场景的图片。
◦ [BDD100K 数据集]:包含10万张驾驶场景图片,其中有丰富的交通信号灯标注。
◦ [AI City Challenge]:专注于智能交通的竞赛数据集,包含交通信号灯检测任务。
• 如果条件允许,可以通过实地拍摄获取真实场景的图片。

-
数据增强:
• 使用数据增强技术扩充数据集,提升模型的泛化能力。常见的数据增强方法包括:
◦ 随机旋转、翻转、裁剪。
◦ 调整亮度、对比度、饱和度。
◦ 添加噪声或模糊处理。
• YOLOv11支持在训练时直接使用数据增强参数,例如:augmentations: - random_flip - random_brightness - random_contrast
-
数据标注:
• 使用标注工具(如LabelImg、CVAT)对图片中的交通信号灯进行标注,生成YOLO格式的标注文件(.txt文件)。
• 每个标注文件的内容格式如下:<class_id> <x_center> <y_center> <width> <height>其中,
<class_id>是类别编号(如0表示红灯,1表示黄灯等),<x_center>和<y_center>是目标框中心点的归一化坐标,<width>和<height>是目标框的归一化宽高。 -
数据集划分:
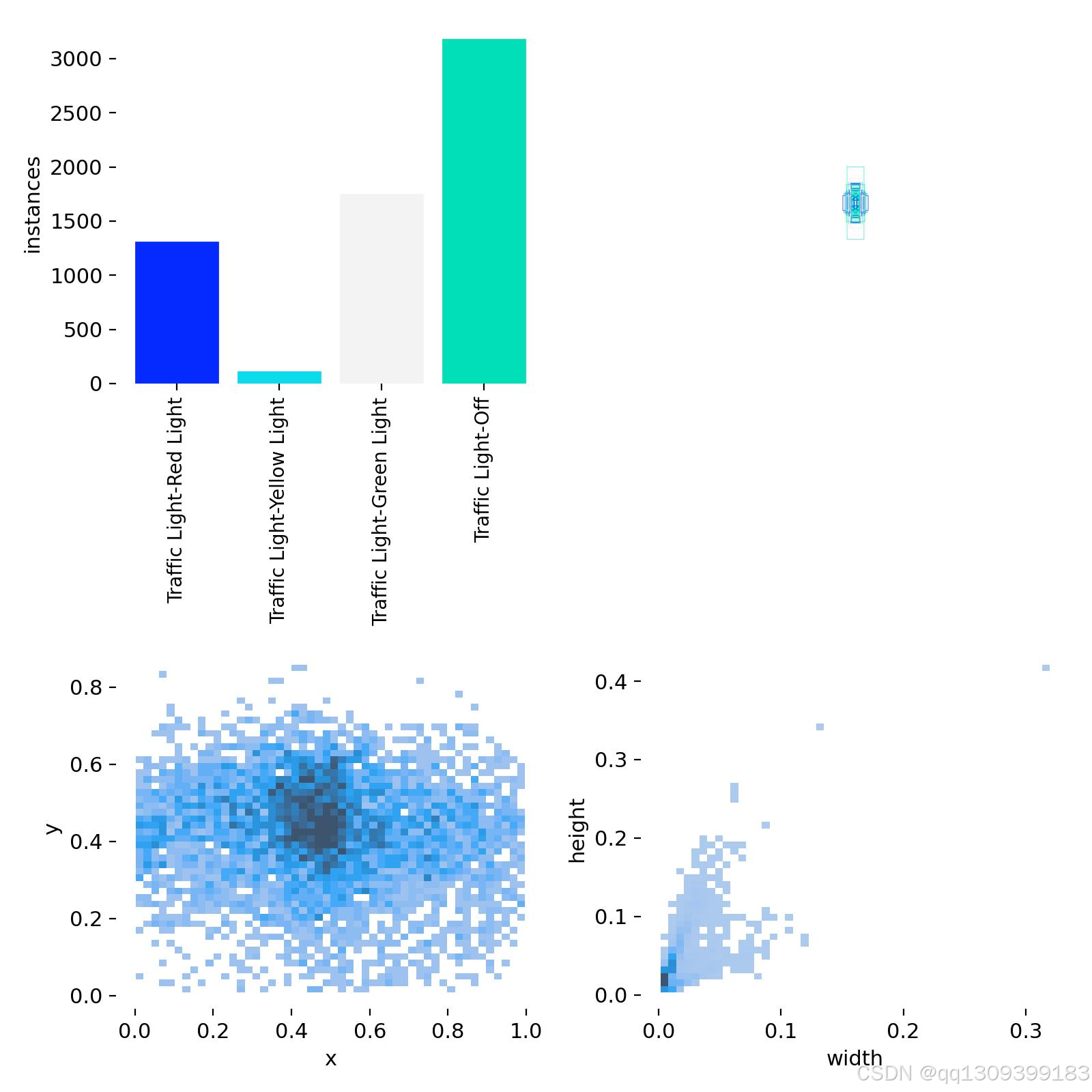
• 将数据集划分为训练集、验证集和测试集,建议比例为7:2:1。
• 确保每个类别的样本分布均匀,避免某些类别样本过少导致模型偏向某些类别。
模型训练
YOLOv11的训练过程相对简单,以下是一个示例命令:
python train.py --data your_data.yaml --weights yolov11n.pt --epochs 300 --batch-size 16 --img-size 640
• your_data.yaml:数据集配置文件。
• yolov11n.pt:YOLOv11的预训练权重。
• --epochs 300:训练300个epoch。
• --batch-size 16:每次训练的批量大小。
• --img-size 640:输入图片的分辨率为640x640。
如果数据集较小,可以适当减少batch-size,以避免显存不足的问题。
模型优化
-
学习率调整:
• 使用学习率调度器(如Cosine Annealing、ReduceLROnPlateau)动态调整学习率,提升模型的收敛速度和精度。 -
损失函数优化:
• YOLOv11默认使用CIoU损失函数进行目标框回归,可以尝试其他损失函数(如DIoU、GIoU)以进一步提升检测精度。 -
模型轻量化:
• 如果需要部署到嵌入式设备(如NVIDIA Jetson Nano),可以使用YOLOv11的轻量化版本(如YOLOv11n)以减少计算量。 -
多尺度训练:
• 在训练时启用多尺度训练(multi-scale training),使模型能够适应不同分辨率的输入图片。
模型评估
-
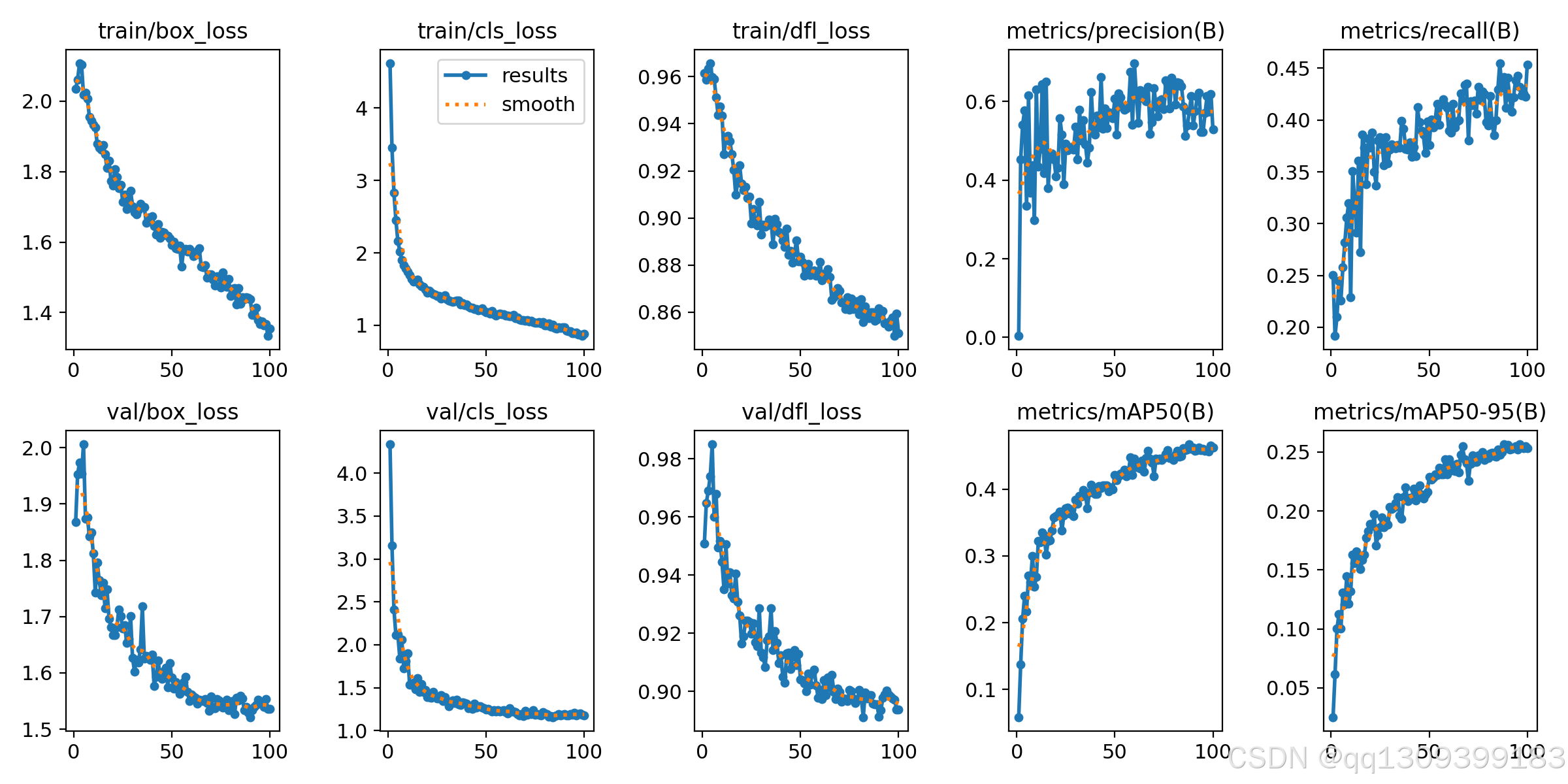
评估指标:
• 使用YOLOv11提供的评估工具,计算模型的mAP(平均精度均值)、F1分数等指标。
• 重点关注小目标和复杂场景下的检测效果。 -
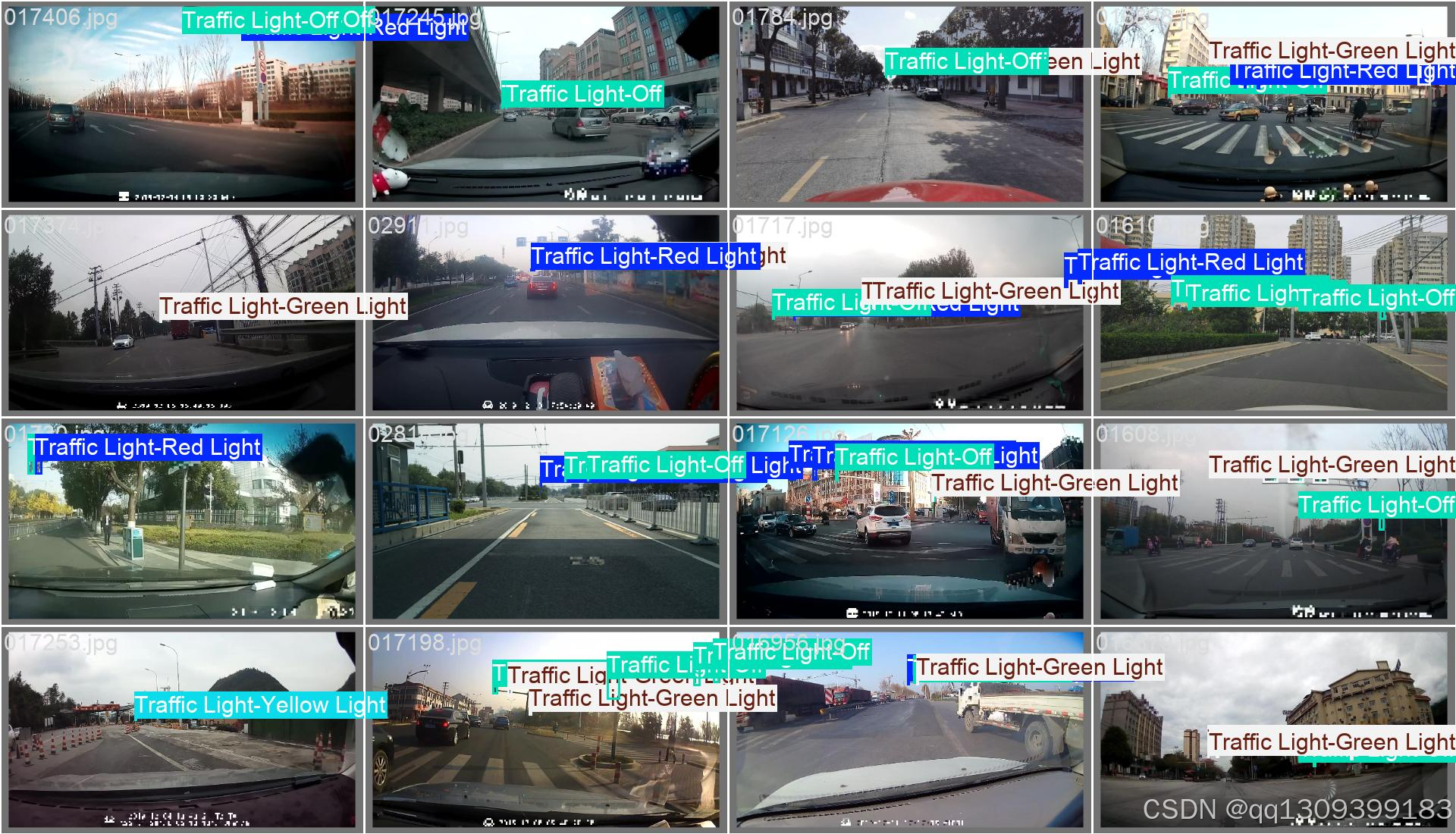
可视化结果:
• 使用YOLOv11的推理功能,对验证集或测试集进行预测,并将结果可视化:python detect.py --weights yolov11n.pt --source light/val/images• 可视化结果可以帮助发现模型在哪些场景下表现不佳。
部署与应用
-
模型导出:
• 将训练好的模型导出为ONNX或TensorRT格式,以提升推理速度。
• 示例命令:python export.py --weights yolov11n.pt --include onnx -
实时检测:
• 在嵌入式设备或移动设备上部署模型,实现实时交通信号灯检测。
• 结合OpenCV或其他图像处理库,对摄像头输入的视频流进行处理。 -
集成到智能交通系统:
• 将交通信号灯检测模块集成到自动驾驶系统或智能交通管理系统中,用于辅助驾驶或交通流量监控。
示例代码
以下是一个简单的YOLOv11推理代码示例:
from ultralytics import YOLO
# 加载模型
model = YOLO('light.pt')
# 推理
results = model.predict(source='light/val/images/001.jpg')
# 可视化结果
results[0].show()
总结
YOLOv11是一个非常适合交通信号灯检测的算法,其高效性和灵活性使其在智能交通领域具有广泛的应用前景。通过扩展数据集、优化模型训练和评估流程,可以进一步提升模型的性能。在实际应用中,结合嵌入式设备和智能交通系统,可以实现更高效的交通管理。
如果你有更多具体问题(如数据集不足、模型训练报错等),可以提供更多细节,我会尽力帮助你解决!


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









