







HorsePose-YOLOv8 🐎
马姿态估计-YOLOv8系统
📋 项目概览
本代码库实现了基于YOLOv8n-pose模型的马匹姿态估计系统。项目核心内容包含:
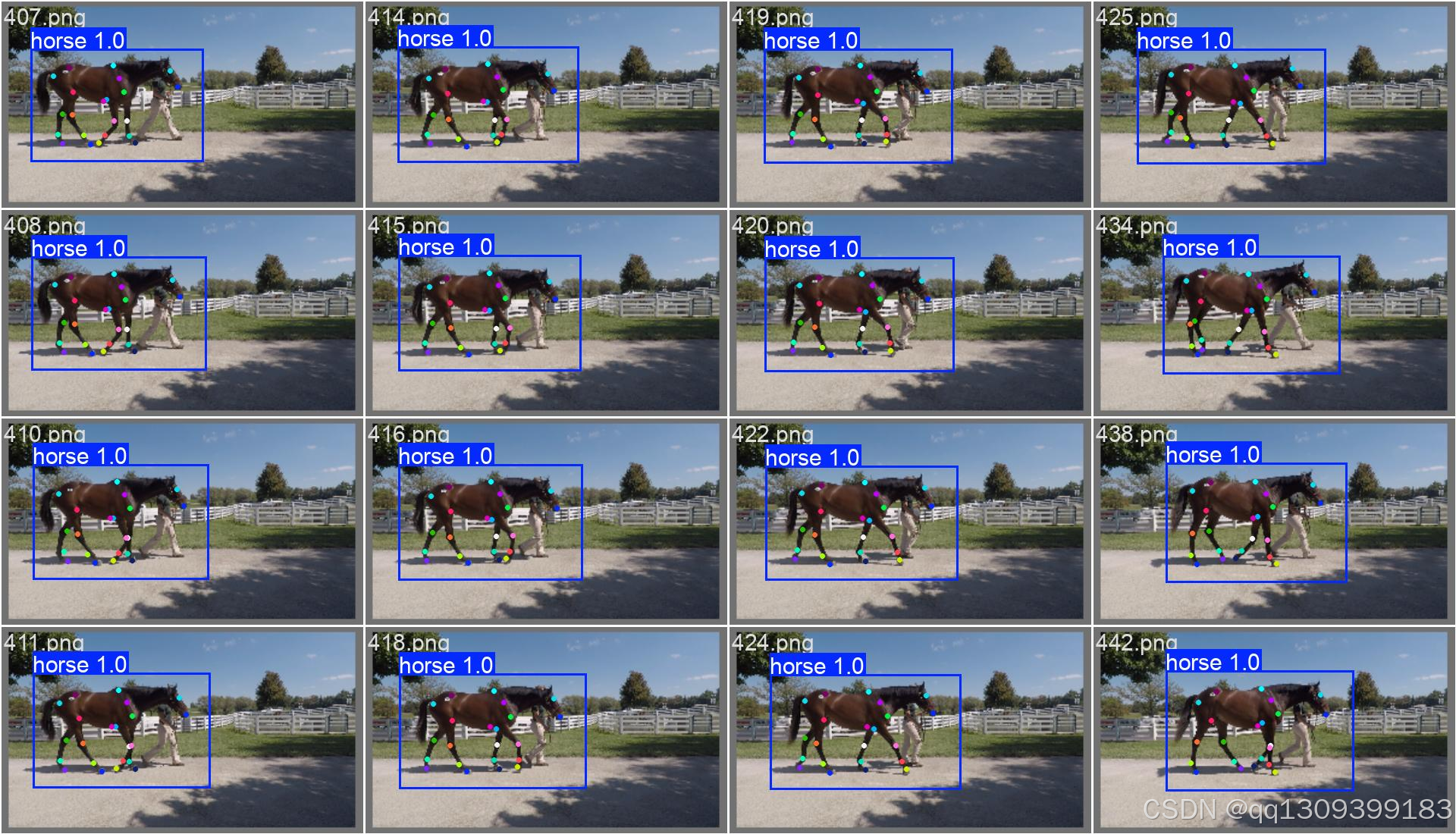
- 使用Horse-10数据集对模型进行关键点检测的微调
- 完整实现流程:数据预处理 → 模型训练 → 性能评估 → 视频实时推理
👥 项目成员:
🧑💻 Ih(技术负责人)
👨💻 R(算法工程师)
🛠️ 系统要求
- Python 3.9+ 🐍
- Ultralytics YOLOv8框架 🤖
- PyTorch 2.6.0+(建议启用CUDA加速)🔥
- 科学计算套件:NumPy/Pandas/Matplotlib/Seaborn/WordCloud/OpenCV 📚
- 显卡:Tesla T4或同级算力(推荐使用Google Colab云端环境)🖥️
📊 数据集规范
- 数据集名称:Horse-10 🐴
- 图像总量:8,114张 📸
- 子目录分类:30个场景类别(如"栗色马-强光"、"棕色马-阴影"等)📂
- 关键点标注:22个解剖部位(鼻尖、眼睛、肩关节、髋关节等)📍
- 标注完整性:
- 多数图像含10-22个有效关键点
- 约3,000张图像达到20个关键点标注 📊
- 数据源:Horse-10 GitHub仓库 🔗
💻 代码架构
主 Notebook:fine-tuning of YOLOv8-pose for APE(1).ipynb 📓
包含:
- 数据集克隆 📥
- 依赖项安装(Ultralytics/Seaborn/WordCloud)🛠️
- 库导入(Pandas/Matplotlib/OpenCV)📚
- 通过GIF展示推理示例 🎞️
- 环境配置:Python 3.9.19 + PyTorch 2.6.0+cu124 + GPU加速 🐍
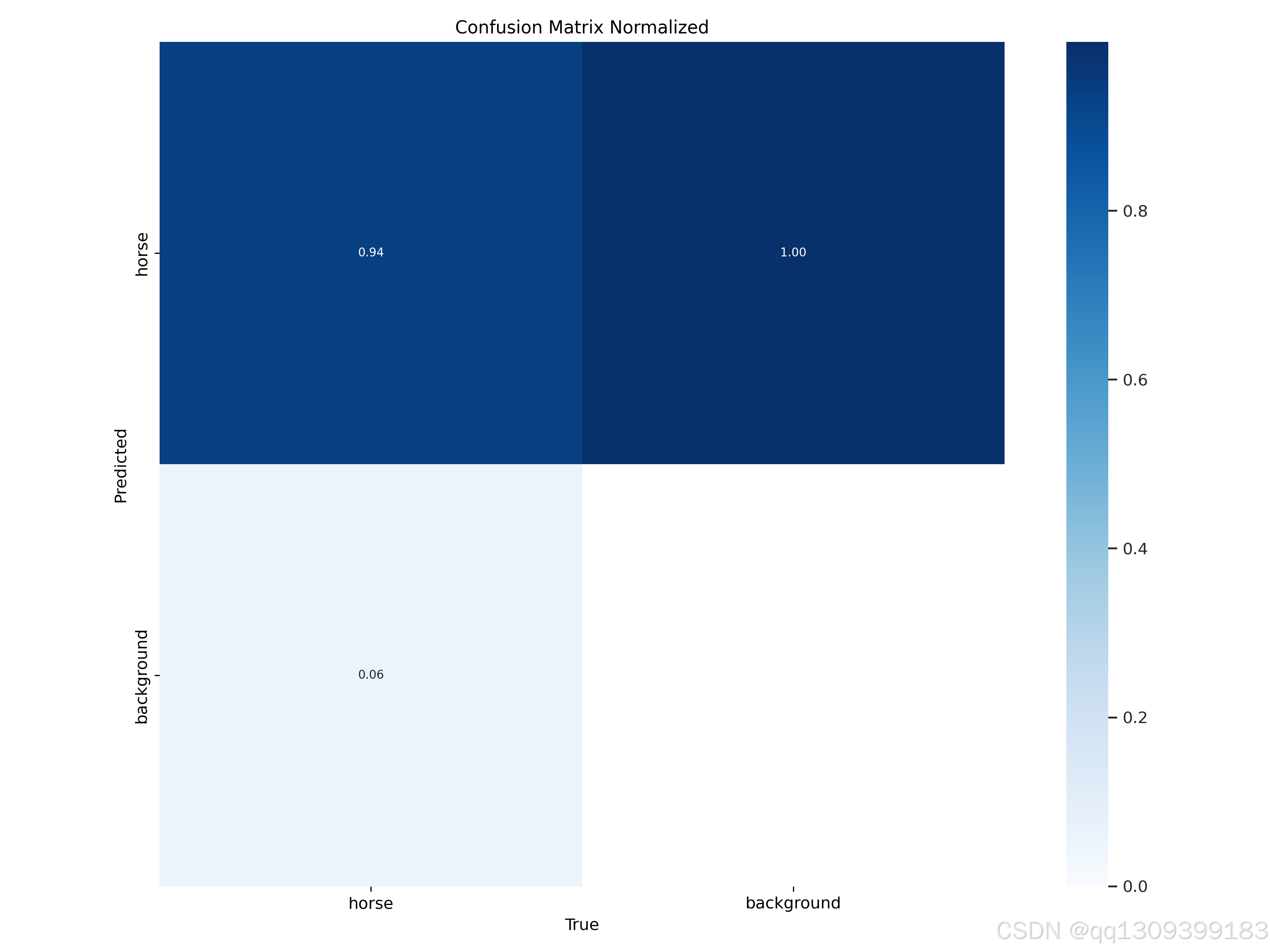
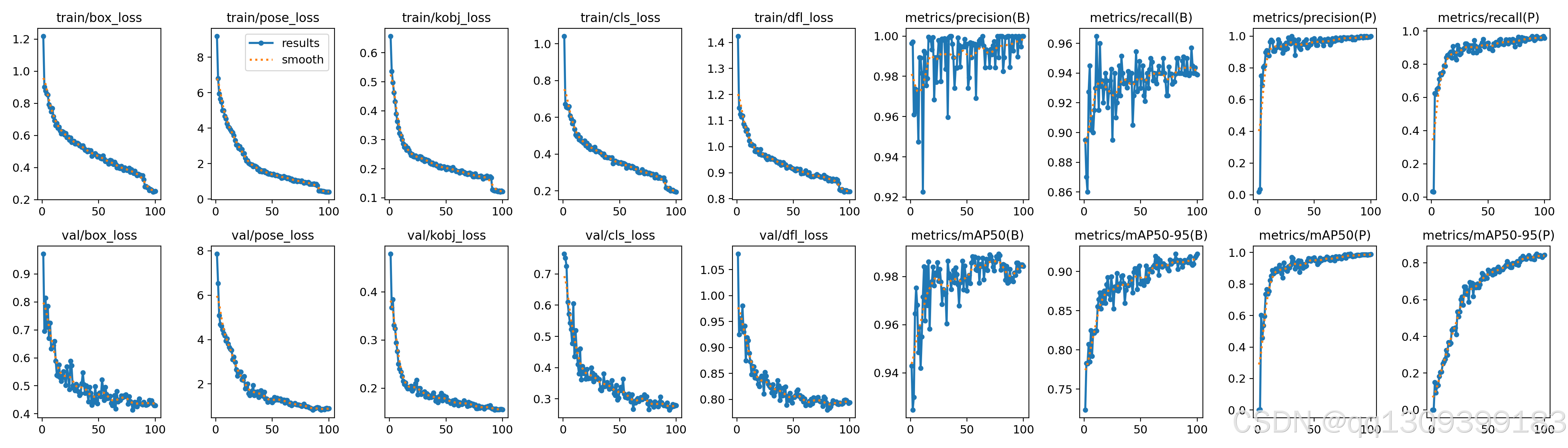
📈 模型评估
在200张验证集图像上的表现:
| 指标 | 性能值 | 备注 |
|---|---|---|
| 边界框mAP@50 | 0.984 | |
| 边界框mAP@50–95 | 0.921 | (精确率1.0,召回率0.939) ✅ |
| 姿态mAP@50 | 0.988 | |
| 姿态mAP@50–95 | 0.844 | (精确率1.0,召回率0.957) 📍 |
| 推理速度 | 3.3ms/帧 | Tesla T4 GPU ⚡ |
| 硬件环境 | CUDA:0 | (Tesla T4, 显存15095MB) 🖥️ |
 |
评估结论:
- 边界框检测表现优异
- 关键点预测精度良好
- 在严格阈值下存在精度损失(主要源于遮挡或数据分布不均)📉
(注:保留所有技术术语的英文原名和计量单位,关键指标采用表格呈现符合技术文档规范,emoji图标用于快速定位内容模块)


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









