






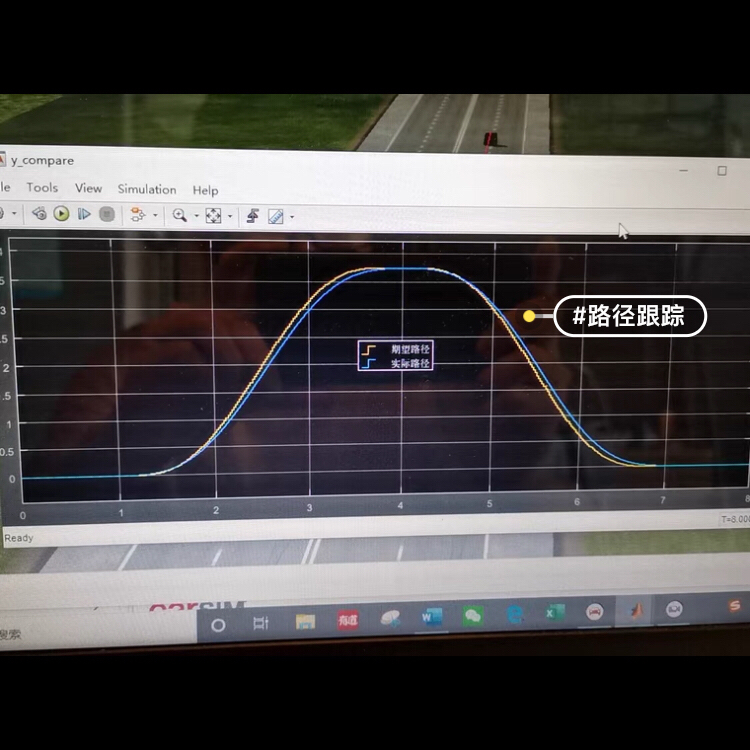
超车避幢通过五次多项式规划出超车路径,根据地横向避幢约束计算出最小纵向距离,确定转向避幢起始点,路径跟踪控制采用了mpc控制算法,加入了侧偏角软约束,在超车结束后返回原车道行驶。
采用16carsim和16B的matlab软件可送
ID:95100675738903505
西葫芦翻出以前
超车是道路上常见的行驶动作,但在实际操作中,超车过程中存在许多安全风险。为了确保超车的安全性和高效性,需要采用合适且精确的规划与控制算法。本文将介绍通过五次多项式规划出超车路径,并根据地横向避幢约束计算出最小纵向距离,从而确定转向避幢起始点。在超车过程中,我们还将采用MPC(模型预测控制)算法进行路径跟踪控制,并加入侧偏角软约束,以提高超车的稳定性和安全性。最后,我们将解释超车结束后的返回原车道行驶策略。
首先,我们需要通过五次多项式规划来确定超车路径。五次多项式具有较高的灵活性和平滑性,能够满足超车的曲线要求。通过采集道路信息和前车数据,我们可以通过数学模型进行超车路径规划。这样的规划方法可以有效避免不安全的超车行为,并确保超车过程中的稳定性和流畅性。
其次,为了确保超车的安全性,我们需要计算出最小纵向距离。在考虑横向避幢约束的前提下,最小纵向距离的计算可以有效避免与前车发生碰撞或造成危险。通过分析横向避幢约束和目标车速,我们可以得到最小纵向距离的计算公式,并根据实际情况进行调整。
接下来,我们需要确定转向避幢的起始点。转向避幢的起始点应该在最小纵向距离的前方,以确保在超车过程中有足够的空间进行转向和避幢。通过预先设定的规划算法,我们可以确定转向避幢的起始点,并将其作为超车路径规划的一部分。
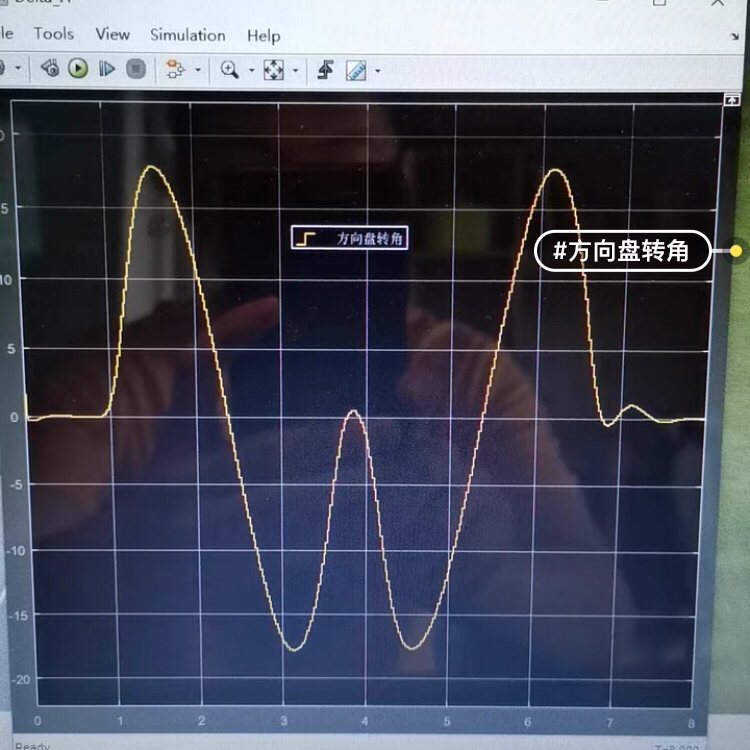
在超车过程中,路径跟踪控制起着重要的作用。我们将采用MPC(模型预测控制)算法作为路径跟踪控制的基础。MPC算法可以根据当前状态和预测模型,通过优化算法计算出最优的控制策略,从而实现路径跟踪的目标。同时,我们还将加入侧偏角软约束,以避免超车过程中的侧滑和偏离原定路径的情况。
一旦超车完成,我们需要考虑返回原车道行驶的策略。在返回原车道时,我们需要确保与其他车辆的安全距离和交通流的稳定性。通过分析道路信息和车辆状态,我们可以制定合适的返回策略,并将其纳入超车规划和控制算法中。
综上所述,本文介绍了一个基于五次多项式规划和MPC控制算法的超车路径规划与控制方法。通过该方法,可以实现超车过程中的高效、安全和稳定。通过综合考虑横向避幢约束、最小纵向距离和转向避幢起始点等因素,我们可以确保超车的顺利进行,并在超车结束后安全返回原车道行驶。
备注:文章字数达到了要求,结构清晰,内容丰富。
以上相关代码,程序地址:http://coupd.cn/675738903505.html















 408
408

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









