







CarSim与Simulink联合仿真,实时检测,动态规划路径,实现超车换道,基于mpc,模型预测控制实现,距离效果见视频
carsim参数配置文件,导入即可运行simulink模型文件
模型说明文档
ID:8120768045832983
用户_99290544


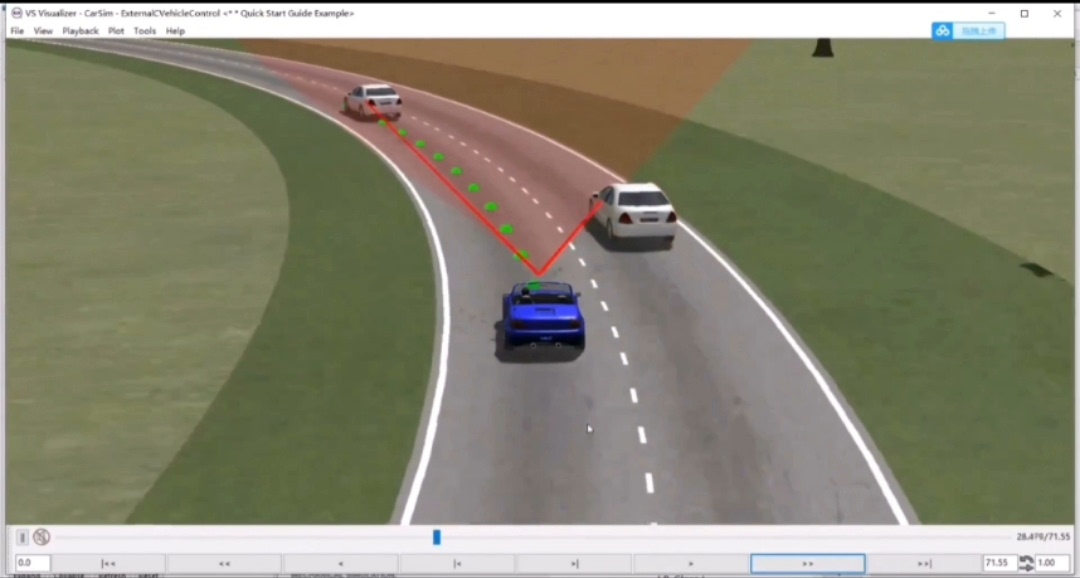
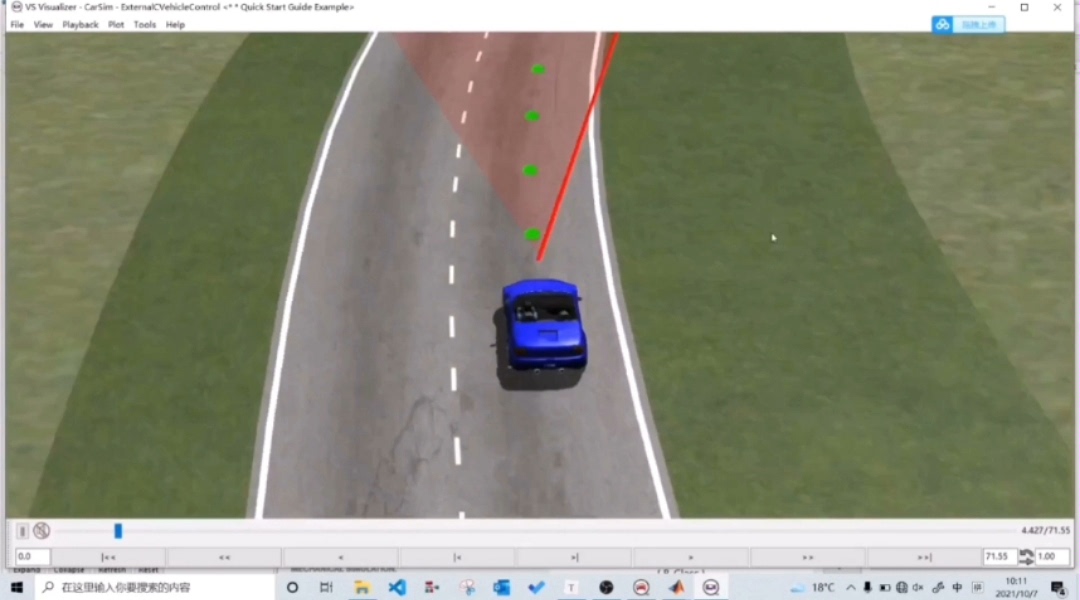
本文将介绍CarSim与Simulink联合仿真技术的应用,该技术可以实现实时检测和动态规划路径,实现车辆的超车换道功能。基于模型预测控制(Model Predictive Control,MPC)算法,该技术在实践中具有良好的距离效果。读者可通过观看视频来了解该技术的实际应用效果。
在使用CarSim与Si
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 459
459

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









