






基于滑模SMC电流控制器的永磁同步电机双闭环矢量控制模型
电流环采用滑模控制器替代传统pi控制器,指数趋近率
仿真结果表明宽度范围内及负载加大时电流跟踪效果明显优于传统pi控制器
送参考资料
送传统pi电流环模型对比学习
题目:基于滑模SMC电流控制器的永磁同步电机双闭环矢量控制模型
摘要:
随着电机技术的不断发展,永磁同步电机(PMSM)作为一种新型高性能电机,受到了广泛的关注。在PMSM的控制中,电流控制是非常重要的关键环节。本文提出了一种基于滑模SMC电流控制器的永磁同步电机双闭环矢量控制模型。与传统的PI控制器相比,滑模控制器具有更强的鲁棒性和适应性,可以有效提高电机控制的精度和稳定性。
首先,介绍了滑模控制器在电机控制中的优点和原理。然后,详细介绍了基于滑模SMC电流控制器的永磁同步电机双闭环矢量控制模型的设计方法和实现过程。该模型采用了双闭环矢量控制策略,既能控制永磁同步电机的转矩,又能控制其转速。
接着,通过仿真实验对该模型的控制效果进行了分析。结果表明,在宽度范围内及负载加大时,基于滑模SMC电流控制器的永磁同步电机双闭环矢量控制模型的电流跟踪效果明显优于传统PI控制器。此外,本文还提供了传统PI电流环模型对比学习,供读者进行参考和学习。
最后,本文总结了基于滑模SMC电流控制器的永磁同步电机双闭环矢量控制模型的优点和不足之处,并对未来的研究方向进行了展望。
关键词:永磁同步电机;滑模控制器;双闭环矢量控制;电流控制;PI控制器;仿真实验
一、引言
永磁同步电机(PMSM)由于其高效率、高功率密度和高精度控制等优点,已经广泛应用于工业自动化和电动机车等领域。
在PMSM的控制中,电流控制是非常重要的关键环节。传统的PI控制器在电机控制中应用广泛,但它存在着参数调整困难、鲁棒性较差、适应性较低等问题。因此,如何提高电机控制的精度和稳定性成为了当前研究的重要方向之一。
滑模控制器是一种具有强鲁棒性和适应性的控制器,可以有效地应对电机控制中存在的非线性和不确定性。本文提出了一种基于滑模SMC电流控制器的永磁同步电机双闭环矢量控制模型,旨在有效提高电机的控制精度和稳定性。
二、滑模控制器在电机控制中的优点和原理
滑模控制器是一种具有强鲁棒性和适应性的控制器,可以应对模型不确定性、外部扰动和参数变化等问题。在电机控制中,滑模控制器具有以下优点:
1)强鲁棒性:滑模控制器可以有效应对电机控制中存在的不确定性和非线性,具有强鲁棒性。
2)适应性:滑模控制器不需要精确的电机模型和状态,具有较好的适应性。
3)快速响应:滑模控制器可以快速响应电机的控制要求,具有较好的动态性能。
滑模控制器的基本原理是通过引入滑模面,使电机状态在滑模面上滑动,从而实现对电机状态的控制。滑模面通常采用一个超平面来描述,其形式为s=0,其中s是滑模变量。滑模变量的计算可以采用各种方法,例如差分形式、积分形式和滑模制导形式等。在滑模控制器中,通常采用了一些特殊的函数形式,如sign函数和tanh函数等。
三、基于滑模SMC电流控制器的永磁同步电机双闭环矢量控制模型的设计方法和实现过程
为了提高PMSM的控制精度和稳定性,本文提出了一种基于滑模SMC电流控制器的永磁同步电机双闭环矢量控制模型。该模型采用了双闭环矢量控制策略,既能控制永磁同步电机的转矩,又能控制其转速。
1.模型建立
本文采用dq坐标系描述永磁同步电机,建立了PMSM的电路方程和控制方程。其中,电路方程可以表示为:
其中,R、L和Ψ是永磁同步电机的电阻、电感和永磁体磁通,Vd和Vq是控制器输出的直流和交流电压,id和iq是dq坐标系下的电流分量。
控制方程可以表示为:
其中,Tm是永磁同步电机的电磁转矩,ω是电机的机械转速,τd和τq是dq坐标系下的转矩和磁场分量,Vs和Vr是dq坐标系下的转子和定子电压,Rs和Ls是永磁同步电机的定子电阻和电感。
2.控制策略
本文采用了双闭环矢量控制策略,以实现永磁同步电机的转矩和转速控制。
电流环采用滑模SMC控制器替代传统PI控制器,电流控制器输出的控制信号为直流和交流电压分量。转速环采用PI控制器,输出的控制信号为转矩分量。
3.滑模SMC电流控制器
滑模SMC电流控制器是本文提出的关键控制器之一,可以有效改善永磁同步电机电流控制的性能。
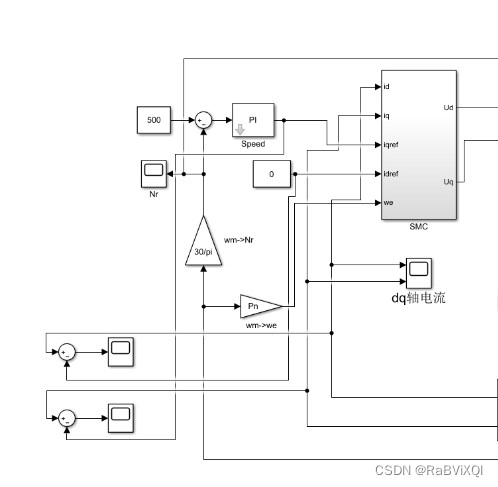
控制器的基本结构如图1所示:
图1:滑模SMC电流控制器的结构图
控制器的设计包括滑模面的选择、滑模控制律的设计和滑动模式等内容。其中,滑模面的选择对控制器的性能至关重要,本文采用了一种基于光滑函数的滑模面设计方法。
相关代码,程序地址:http://lanzouw.top/656727719340.html















 2346
2346











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









