







 本文深入探讨了TDOA(到达时间差)定位技术,对比TOA(到达时间),阐述了TDOA如何简化信号结构,降低时钟同步需求,从而在多种应用场景下提供更高效、准确的定位解决方案。
本文深入探讨了TDOA(到达时间差)定位技术,对比TOA(到达时间),阐述了TDOA如何简化信号结构,降低时钟同步需求,从而在多种应用场景下提供更高效、准确的定位解决方案。
As the name suggests, TDOA estimation requires the measurement of the difference in time between the signals arriving at two base nodes. Similar to TOA estimation, this method assumes that the positions of base nodes are known [5] .
The TOA difference at the base nodes can be represented by a hyperbola. A hyperbola is the locus of a point in a plane such that the difference of distances from two fi xed points(called the foci) is a constant.
顾名思义,TDOA估计需要测量到达两个基节点的信号之间的时间差。 与TOA估计类似,该方法假设基节点的位置是已知的[5]。
基节点处的TOA差可以用双曲线表示。双曲线是平面中点的轨迹,使得距两个固定点(称为焦点)的距离差是常数。
关于双曲线的基础知识,可自行充电: Hyperbola
Assuming known positions of base nodes and a coplanar scenario, three base nodes and two TDOA measurements are required to localize a target node (see Fig. 1.2 b).
Fig. 1.2 b
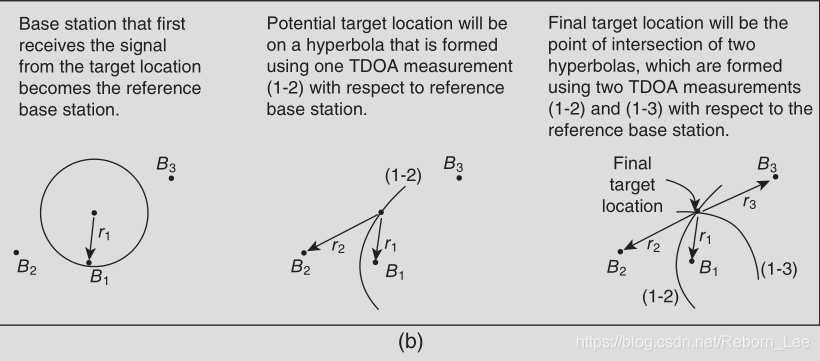
As shown in the figure, the base station that first receives the signal from the target node is considered as the reference base station . The TDOA measurements are made with respect to the reference base station. For a non - coplanar case, the positions of four base nodes and three TDOA measurements are required.
如图所示,首先从目标节点接收信号的基站被认为是参考基站。 TDOA测量是相对于参考基站进行的。 对于非共面情况,需要四个基节点的位置和三个TDOA测量。
TDOA addresses the first drawback of TOA by removing the requirement of synchronizing the target node clock with base node clocks. In TDOA, all base nodes receive the same signal transmitted by the target node. Therefore, as long as base node clocks are synchronized, the error in the arrival time at each base node due to unsynchronized clocks is the same.
TDOA通过消除将目标节点时钟与基节点时钟同步的要求来解决TOA的第一个缺点。 在TDOA中,所有基节点接收由目标节点发送的相同信号。 因此,只要基节点时钟同步,由于不同步的时钟,每个基节点的到达时间的误差是相同的。
意思是TOA的测量需要知道目标什么时候发送信号,这样我才能计算出来目标信号到达测量站之间的到达时间,用一句话总结就是目标节点和基节点时钟同步。然而,这在很多情况下是不现实的,例如,你对敌方目标进行侦察定位,你还要求对方告诉你什么时候发送信号吗?哈哈。。。
至于TDOA,我不需要知道对方什么时候发送信号,我只需要我的测量平台上的时钟同步即可,我的参考节点接收到信号的时间与其他基节点接收到信号的时间是同步的,我们之间有一个差值,通过这个差值可以实现定位。一个差值可以确定一个双曲线,在共面的情况下,两个差值就可以确定两个双曲线,这两个双曲线可以有一个交点,即为目标。如果不共面,则需要三个差值,那就是4个测量站。
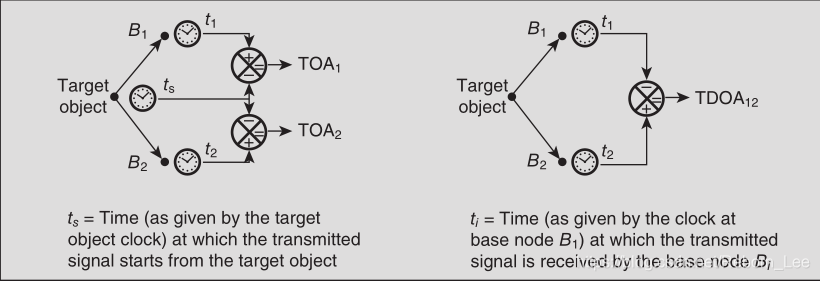
As shown in Figure 1.2 c, TOA is the time duration (or the relative time) between the start time ( t s ) of the signal at the transmitter (target node) and the end time ( t i ) of the transmitted signal at the receiver (base node B i ). However, as shown in Figure 1.2 c, TDOA is the time difference between the end times ( t i and t j ) of the transmitted signal at two receivers (base nodes B i and B j ). Thus, in the TDOA technique, only base nodes ’ clocks need to be synchronized to ensure minimum measurement error.
如图1.2c所示,TOA是发射机(目标节点)处的信号的起始时间(t s)与发射机信号的结束时间(t i)之间的持续时间(或相对时间)。 但是,如图1.2c所示,TDOA是两个接收机(基站节点B i和B j)的发送信号的结束时间(t i和t j)之间的时间差。 因此,在TDOA技术中,只需要同步基节点的时钟以确保最小的测量误差。
In general, the complexity of target node clock synchronization is higher compared with base node clock synchronization. This is mainly due to the use of quartz clocks at target nodes, which are not as precise as atomic clocks that are generally used for timing at base nodes [5] . Target node clock synchronization is further explained later in this chapter.
通常,与基节点时钟同步相比,目标节点时钟同步的复杂性更高。 这主要是由于在目标节点处使用石英钟,这不如通常用于基节点定时的原子钟精确[5]。 目标节点时钟同步将在本章后面进一步说明。
这句话我也比较迷惑,什么是石时钟:https://en.wikipedia.org/wiki/Quartz_clock
The base node clock can be synchronized externally by using a backbone network or internally using timing standards provided at the nodes. The fact that synchronization of target nodes is not required enables many applications for TDOA -based systems. For example, in battlefield applications, a rescue team may localize the position of a soldier using its beacon signal without the need of synchronization
of rescue team clocks with that of the soldier.
基节点时钟可以通过使用骨干网在外部同步,也可以在内部使用节点提供的时序标准进行同步。 不需要同步目标节点的事实使得基于TDOA的系统的许多应用成为可能。 例如,在战场应用中,救援队可以使用其信标信号来定位士兵的位置而无需同步
救援队的时钟与士兵的时钟。
With respect to the second drawback of TOA, the transmitted signal from the target node in TDOA need not contain a time stamp, since a single TDOA measurement is the difference in the arrival time at the respective base nodes. This simplifies the structure of transmitted signals and removes potential sources of error. This advantage of TDOA is again exploited by many applications such as emergency call localization on highways [6] and sound source localization by an artificially intelligent humanoid robot [7] .
关于TOA的第二个缺点,来自TDOA中的目标节点的发送信号不需要包含时间戳,因为单个TDOA测量是各个基节点处的到达时间的差异。 这简化了传输信号的结构并消除了潜在的错误源。 TDOA的这一优势再次被许多应用所利用,例如高速公路上的紧急呼叫定位[6]和人工智能人形机器人的声源定位[7]。


















 7148
7148

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











