






本文素材来源于北方民族大学 机电工程学院
作者:牟义达、黄瑞翔、李涛
指导老师:田国禾、张春涛
随着社会的发展,我们的生活不断走向智能化,机器人技术也日益成熟并朝着智能机器和智能系统的方向进行发展。
机器人技术主要是对生活和工作环境进行优化设计。特别是智能化作业,对人们的生活带来了大的改变,它让我们的生活和工作更加便捷。智能化作业主要是设计算法,算法也即控制方法。这些算法能够大大降低我们作业的复杂性,然后利用一些传感器和机械结构来实现我们设计的算法,进而实现我们所需的功能。
随着如今建筑结构的复杂性与高危性,灾难发生的不可预知性,一旦发生大型火灾就特别危险,因为可能伴随着大量有毒气体等毒性物质,每年有很多消防战士牺牲于消防作业之中,这时消防机器人就应运而生了。随着机器人技术的日益成熟,智能消防机器人也非常常见,相对于早期的非智能消防机器人,它能够更好地为人们去危区作业,大大地降低了人员伤亡,缓解损失。因此有非常不错的发展前景。
本作品所设计的消防机器人是以探索者组件进行搭建的,以Arduino为平台进行控制设计,模拟真实消防机器人进行消防作业。
这个消防机器人设计核心是检测功能,它能够在一块区域内基本无死角检测火源,检测到之后能够精确定位到火源处,再开启灭火装置进行消防操作。
1.功能分析
智能消防机器人应拥有自主抵达作业现场、对火源进行检测以及及时作出消防动作的能力。自主抵达作业现场功能的实现则需要消防机器人能够自主行走,对火源进行检测功能的实现则需要机器人有相应的范围内检测及传感功能,灭火功能的实现则需要机器人要有合适的灭火装置。因此消防机器人应具备的能力有:自主行走、火源检测、灭火等功能。
2.系统总体方案设计
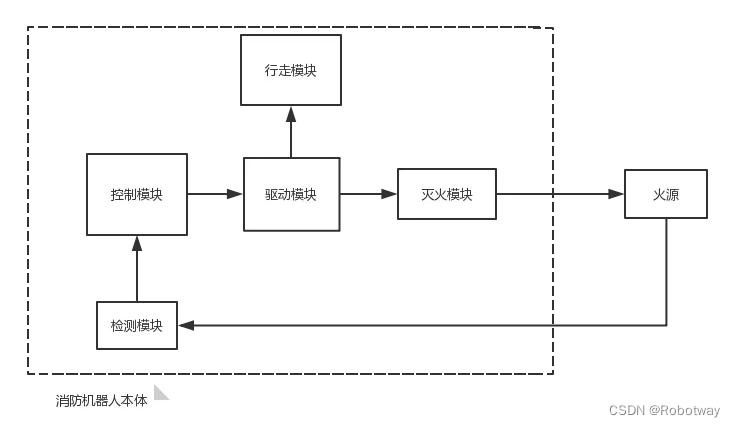
如上图所示,消防机器人的作业系统主要由机器人本体与被检测物(火源)组成。消防机器人本体主要由控制模块、驱动模块和检测模块组成;驱动模块包含驱动机器人自主行走和驱动灭火装置两部分。作业关系流程如下:消防机器人通过检测模块在一定范围内检测火源;若火源被检测模块检测到,则将该信息反馈于消防机器人的控制板模块,控制板模块则命令驱动模块驱动灭火模块,直到灭火模块完成灭火操作;灭火操作完成后则控制模块驱动机器人行走模块进入下一个消防作业区。
3.消防机器人控制模块
消防机器人的控制模块是机器人的大脑,机器人的执行由该模块控制。控制模块的设计主要就是软件设计,也即编程设计。编程设计主要是将各个功能模块有机结合起来,使得机器人各个功能相互协调,共同合作有效完成相应功能。
4.消防机器人驱动模块
消防机器人的驱动模块是完成机器人进行消防作业功能的主要执行模块。驱动模块受控制模块的控制,安照控制模块给出的指令完成相应的操作。驱动模块主要完成的操作有“驱动机器人行走模块”和“驱动灭火装置”。
驱动行走模块是为了对消防机器人进行作业区转移,待当前的消防作业完成之后其进入下一个消防作业区进行作业。行走模块主要是基于探索者组件设计的,探索者里有功能各异的零部件,根据机器人的功能对零件进行分析选取,之后设计出自己所需要的机械结构完成行走行走功能。要实现驱动有很多方案,如轮式的、履带式的、足式的等,可以根据探索者组件进行分析筛选,选择出最合适的方案。
驱动灭火装置是待机器人检测到火源之后需要完成的动作,灭火装置具备扑灭火源的能力并且受命于控制模块。灭火装置也是基于探索者组件进行设计的,对探索者零部件进行分析筛选,最后根据功能需求选择最佳方案。
5.消防机器人检测模块
消防机器人的检测模块主要是检测作业区有无火源,若有火源则将该信息反馈于控制模块,若无火源也要将该信息反馈于控制模块,控制模块才能根据反馈的信息对驱动模块作出相应指令。检测模块具备在作业范围内检测火源的能力,基于探索者组件进行设计,其主要设计的零部件是相应的传感器以及能够使传感器在范围内检测的机械结构,可以分析筛选探索者组件,选择最佳设计方案。
关于移动消防机器人的详细内容可参考基于机器视觉的移动消防机器人
-----------------------------------------------未完待续---------------------------------------------------















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









