







求两个平行线的无穷远点,最简单的方法(二维空间和三维空间都适用)
两个平行线的交点就是无穷远点。求解的方法就是把直线的方向向量(向量我们都用列向量表示)拿到,然后给最后一维加个0就是它们的交点(无穷远点)。这里都是在齐次坐标系下的表示,因为无穷远点只能在齐次坐标系下才能表示。无穷远线或者无穷远面(3维空间才有)就是一个向量(我们把直线方程Ax+By+C=0的系数A,B,C拿出来组成一个向量,我们就称这个向量为这个直线,所说的无穷远线也就是指这个系数向量,无穷远面同理),这个向量的最后一维为1,其余维为0。
补充:
设直线方程Ax+By+C=0,它的直线方向向量可表示为(B,-A),那么与它垂直的向量(法向量)表示为(A,B)
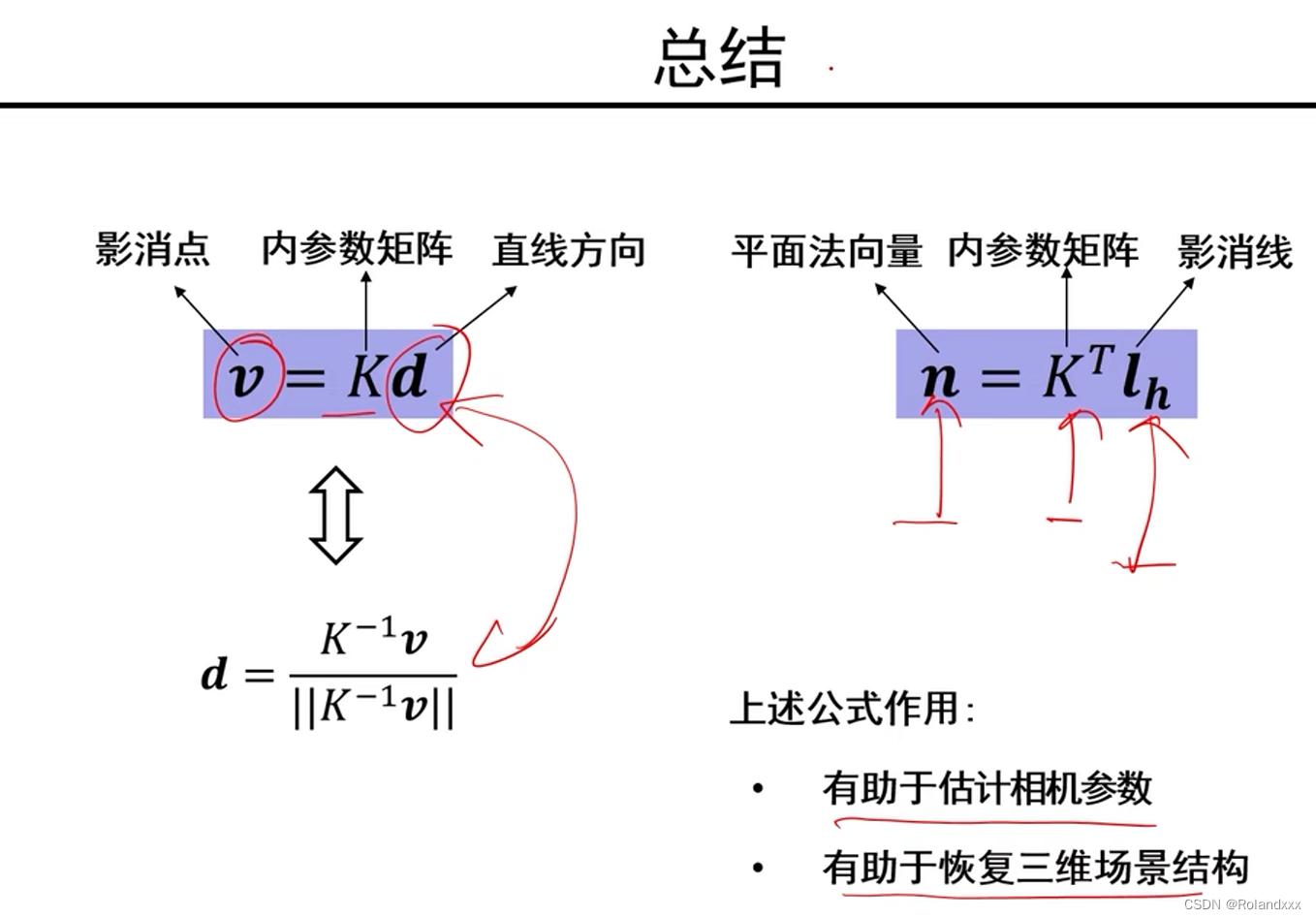
影消点:三维空间中的无穷远点(无穷远点就是一个平面上两条平行线的交点)在图像平面上的投影点称作影消点,投影到图像平面后不再是个无穷远点,因为相机投影到图像平面是透视变换,会让平行线不再保持平行。影消点的单位是像素。
影消线:无穷远线(无穷远线是指在一个平面上,无穷远点连起来构成的直线,一个平面有且对应一条无穷远线)在图像上的投影(透视变换)称作影消线,也就是影消点构成的线。一个平面对应一条影消线。影消线的单位是像素。
2D平面上的变换
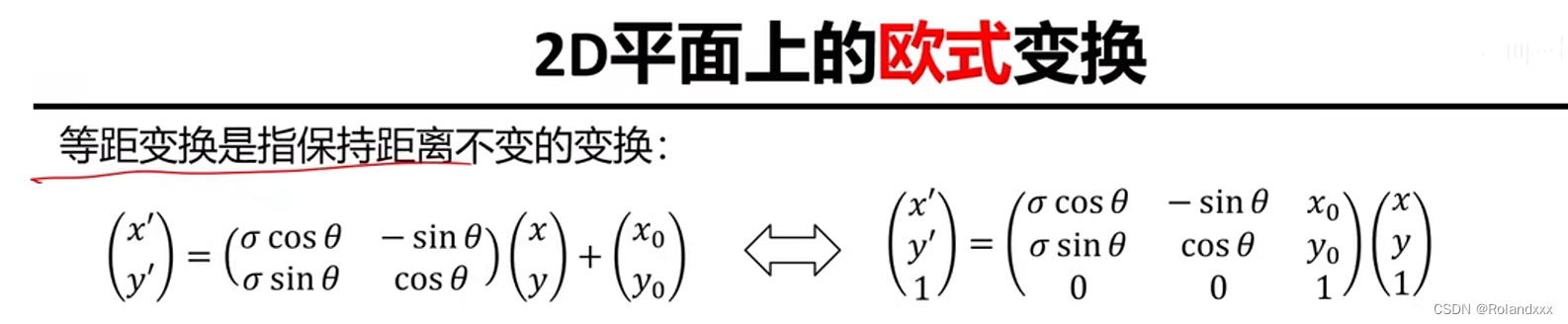
2D平面上的欧式变换:
等距变换就是原来有A和B两个点,A和B两个点经过了上述这个变换后,变换后的A和B两个点的距离还是和变换前一样。下图中左边是欧式坐标系(欧式就是二维坐标系)的表示,右边是齐次坐标系的表示。后面我们都只讨论齐次坐标系的情况。
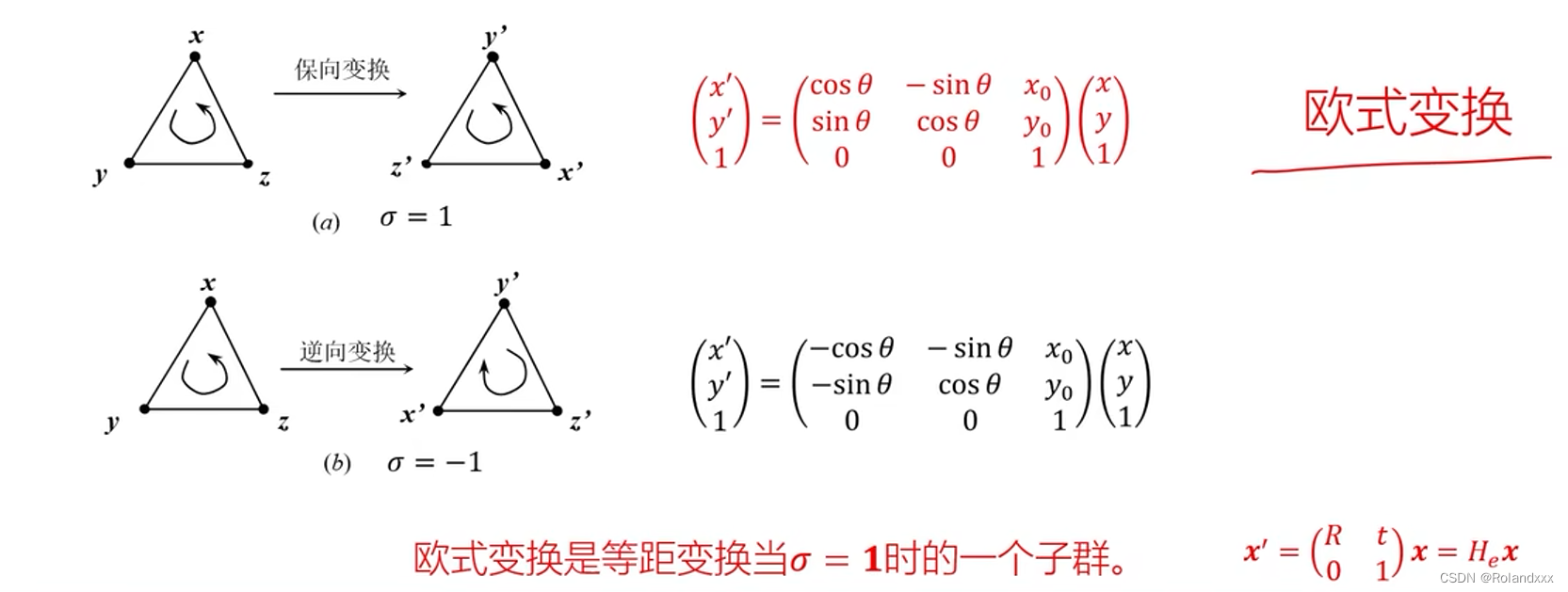
上图中等距变换矩阵里的σ取1和取-1时对应着两种不同的关系。σ取1叫保向变换(就是旋转变换),σ取-1时叫逆向变换(就是镜像变换)。σ取1的等距变换叫做欧式变换,即把一个点进行旋转+平移,这个矩阵相当于一个先旋转后平移的复合操作。
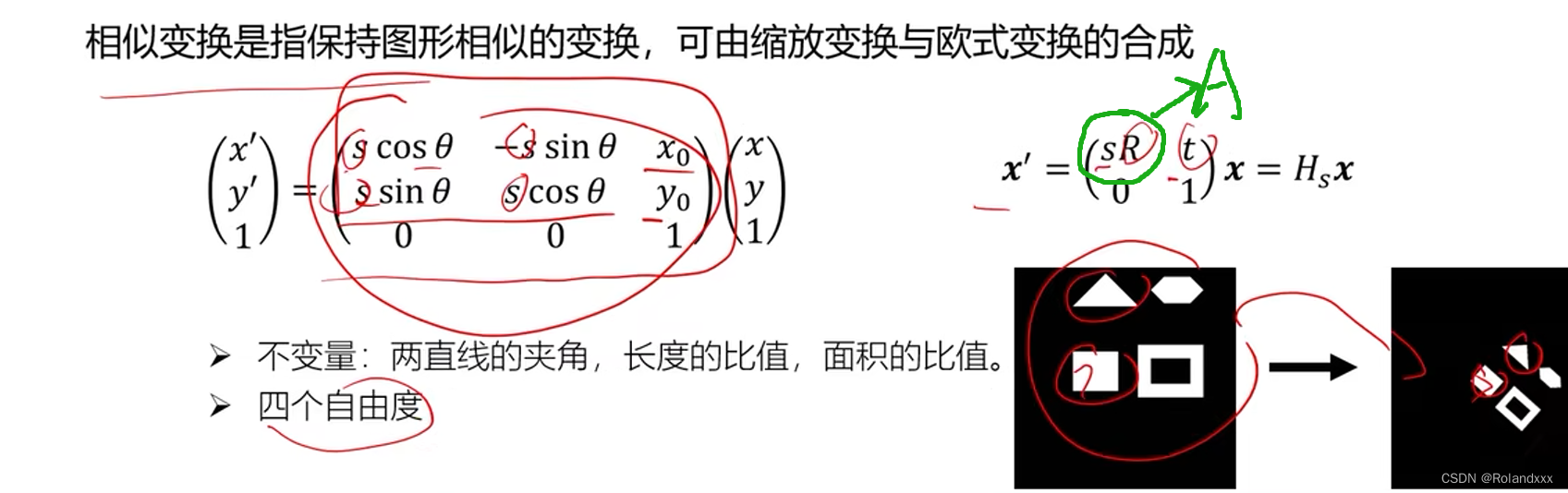
2D平面上的相似变换:
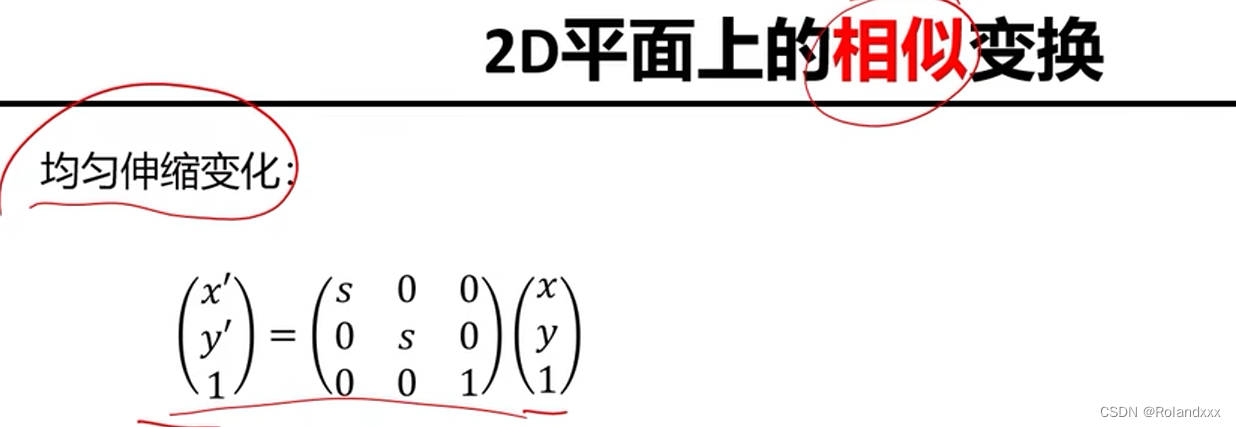
如下图所示,把均匀伸缩变换和欧式变换乘到一起就得到了相似变换,即先做一个欧式变换再做一个伸缩变换。相似变换就是旋转缩放平移。变换前后平行关系会保持,角度关系也会保持。
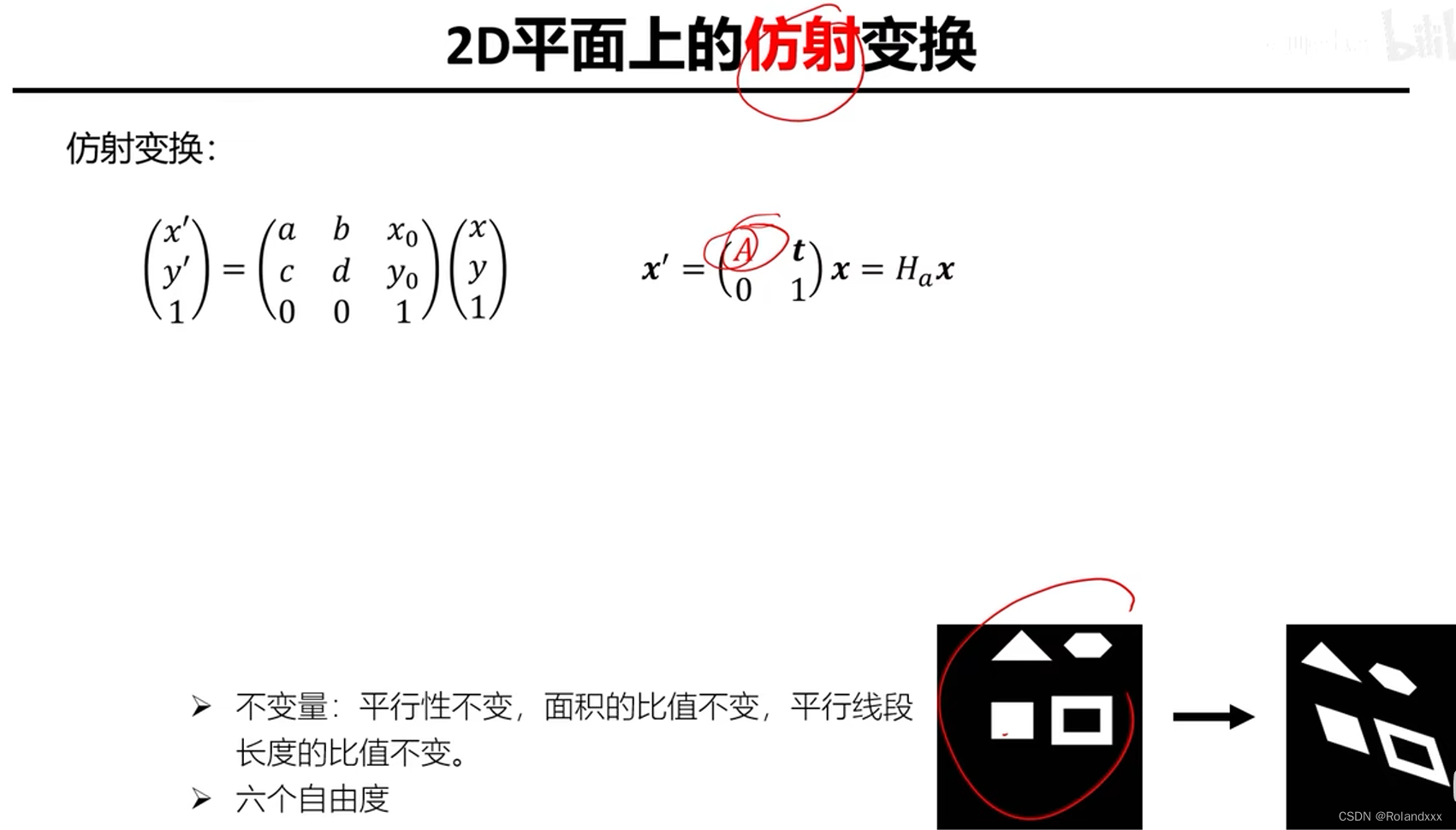
2D平面上的仿射变换
相似变换矩阵中的A是sR,R是一个旋转矩阵,旋转矩阵就必须满足某些固定的要求,得是正交矩阵,向量之间要正交,每个向量的模为1。如果把A随便设置,不再满足sR了,只要A是个满秩的矩阵都行,就得到了一个仿射矩阵,变换前后平行关系还是会保持,但是角度关系不保持了。
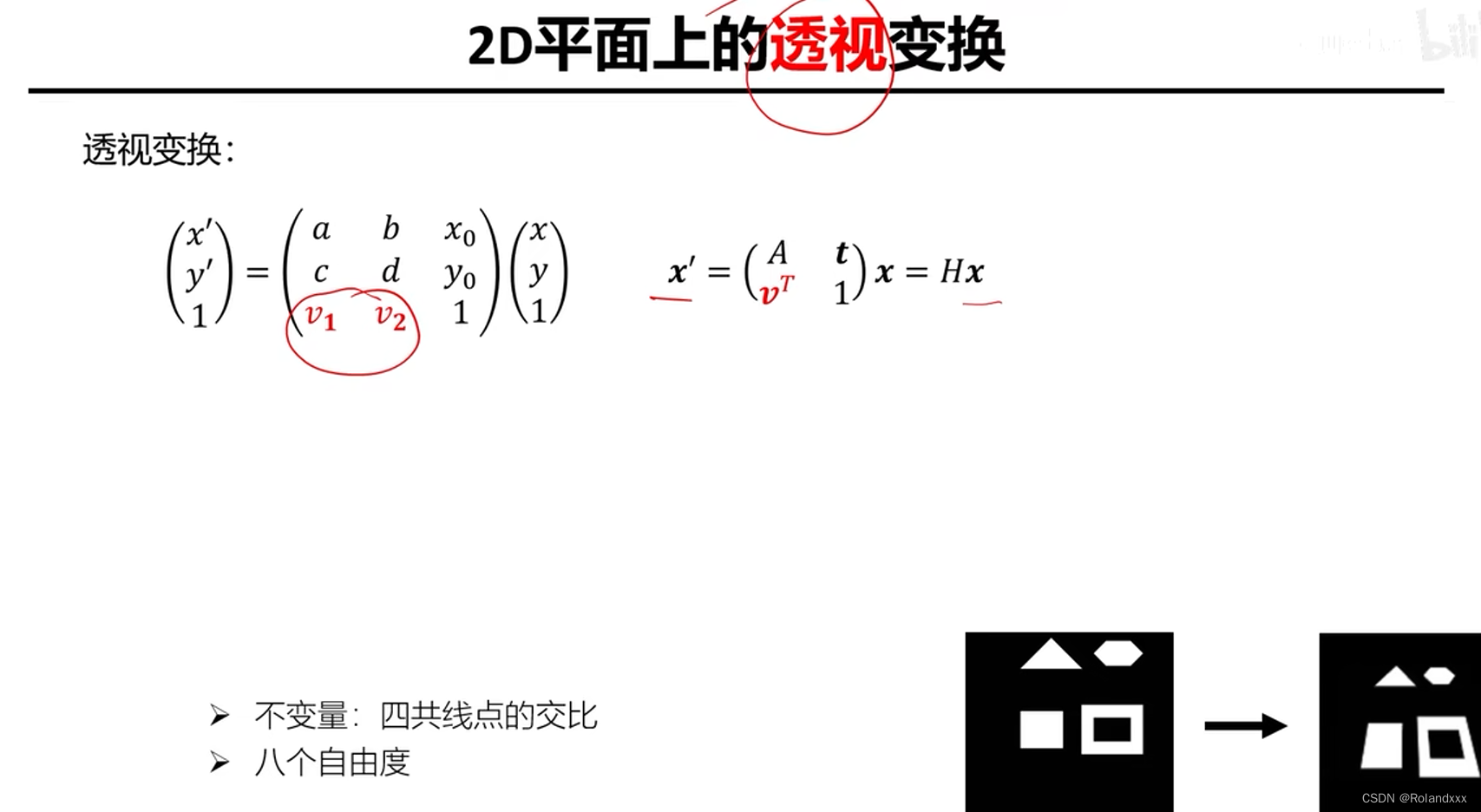
2D平面上的透视变换
透视变换前后平行关系不会保持了。只能保持原来是一个点映射后也还是一个点,原来是个线映射后也还是一个线,原来在同一个平面的东西映射后也还是在同一个平面上。
3D空间上的变换
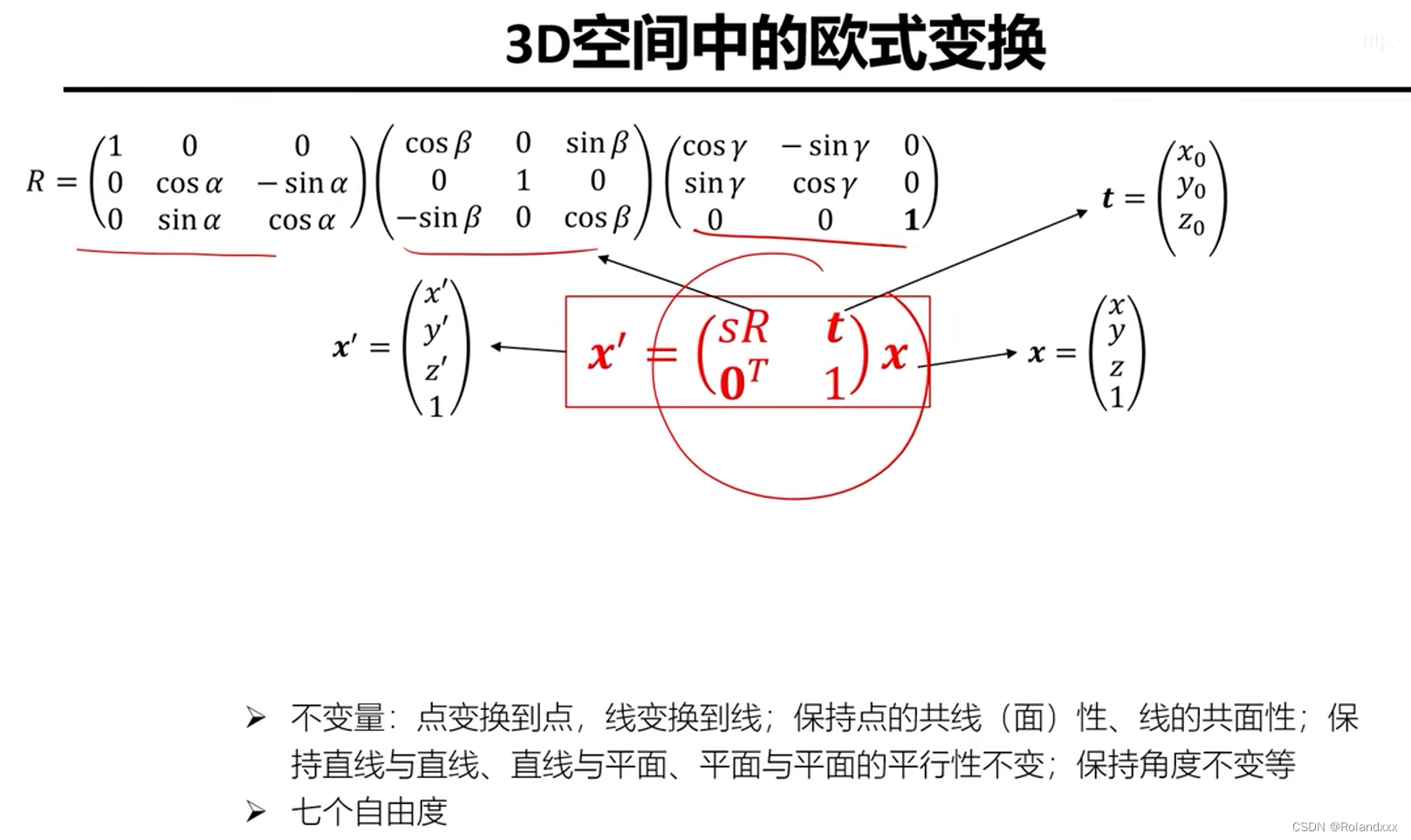
3D空间上的相似变换:
3D空间中变换就是3维到3维的变换,下图的变换也就是一个相似变换,只不过相似变换矩阵中的旋转矩阵有三个轴,所以R矩阵是3乘3的矩阵,s还是缩放因子,t还是平移量,但在三维空间中就是三个平移量了。0这有个转置T是因为所有的向量我们都默认表示为列向量。
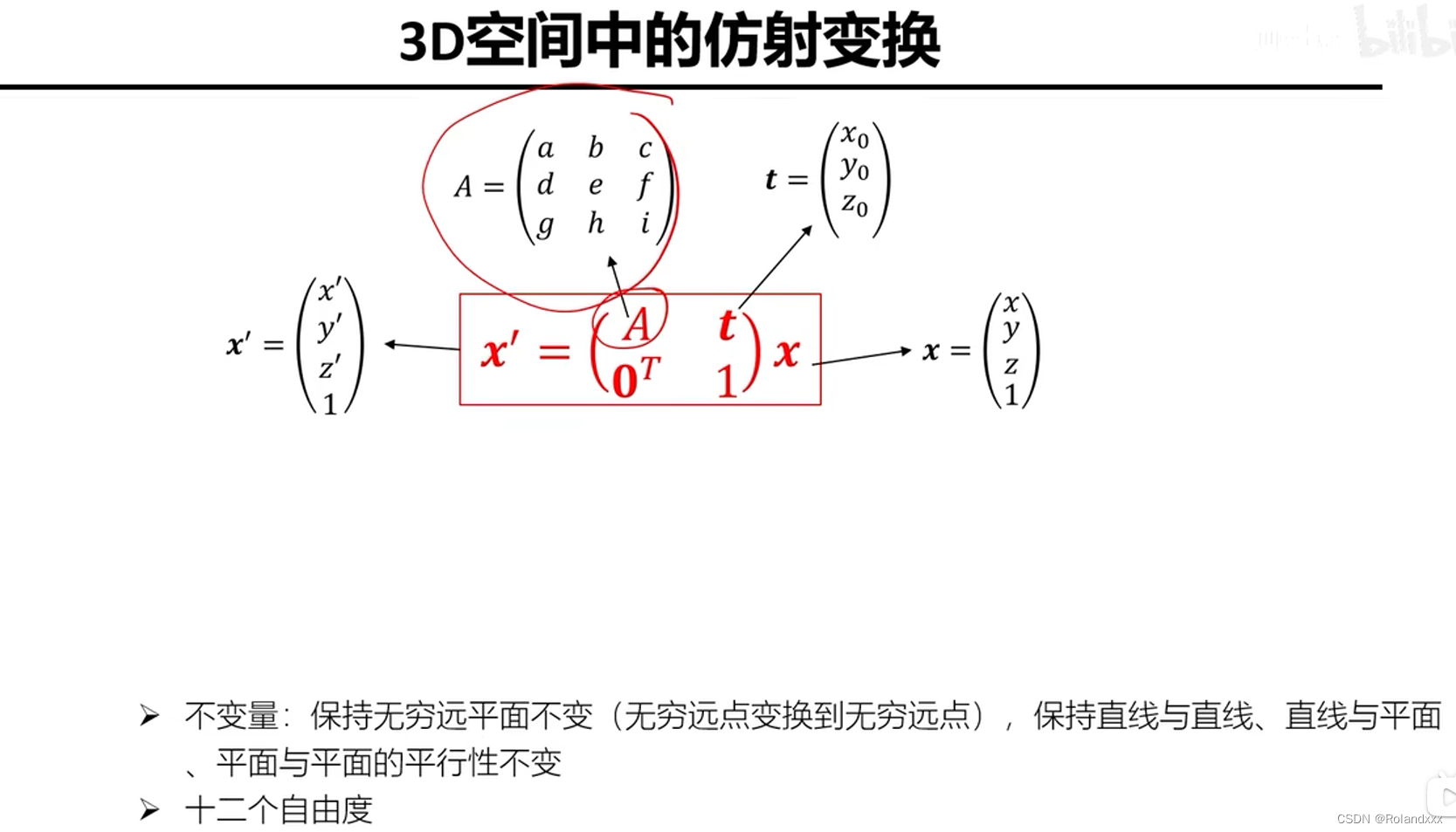
3D空间上的仿射变换:
同2维的仿射变换类似,也是把仿射矩阵中的A拓宽一下变成下图中的样子。下图中的无穷远点是什么意思呢?是因为平行线是会相交的,交点就在无穷远点处。
3D空间上的透视变换:
同二维中的透视变换类似
















 1965
1965











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









