






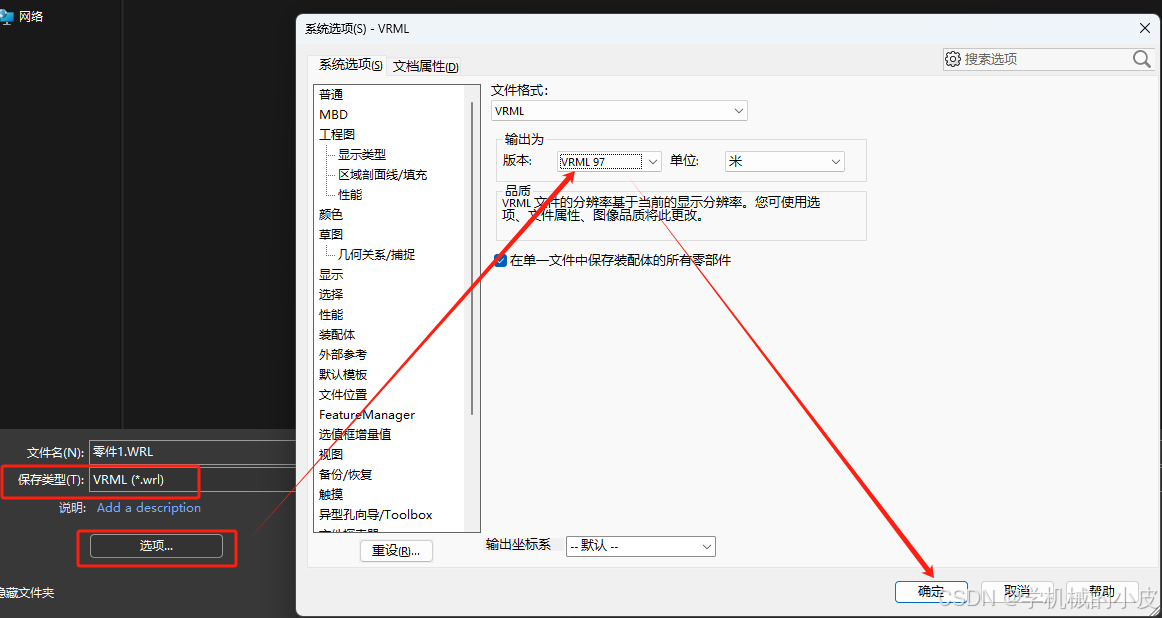
1. solidworks中保存文件为VRML 97文件
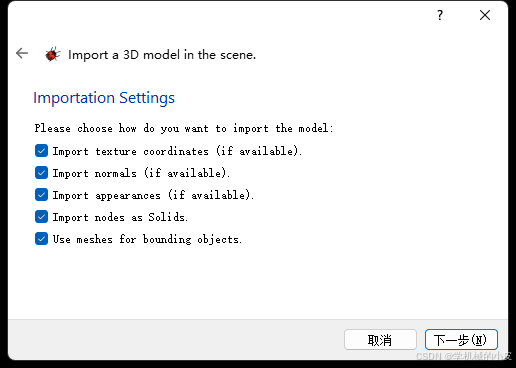
 2. webots中 文件->Import 3D Model
2. webots中 文件->Import 3D Model
> 选中上一步导出的文件,全选
 3
3
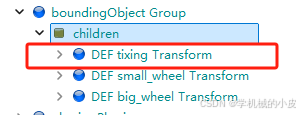
3. 使用得到的transform对象替换掉指定对象的bounding object,调整其translation和rotation属性与shape对应,即可得到需要的碰撞检测边界
1. solidworks中保存文件为VRML 97文件
2. webots中 文件->Import 3D Model
> 选中上一步导出的文件,全选
3
3. 使用得到的transform对象替换掉指定对象的bounding object,调整其translation和rotation属性与shape对应,即可得到需要的碰撞检测边界
 7683
3208
1832
6043
680
7683
3208
1832
6043
680

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言



























