







本工具箱教程以控制系统模型创建、分析与设计流程为主线,通过大量示例介绍MWORKS控制系统工具箱的功能和具体使用。共计10篇文章,上一篇主要介绍了控制系统根轨迹分析。
同元软控:【MWORKS专业工具箱系列教程】控制系列工具箱第六期:根轨迹分析
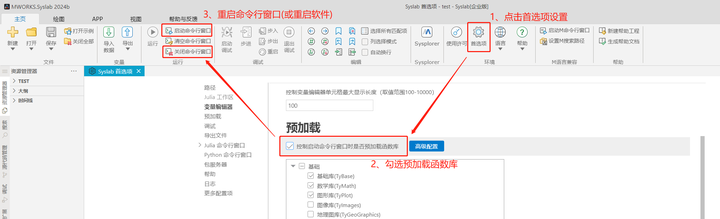
本教程代码均可直接复制到Syslab中运行,使用教程中代码前需参照下述方法加载函数库内容: 方法一:在Syslab的命令行窗口先后输入using TyControlSystems和using TyPlot并回车(重启软件或命令行窗口后需重新输入); 方法二:按照下图中的方法预加载函数库(设置好后每次启动软件默认加载)。
第七期:PID控制器设计
一、PID控制在工业界的应用
在当今应用的工业控制器中,有半数以上采用了PID或变形PID控制器。PID控制的价值取决于它们对大多数控制系统的广泛适用性,体现在:
-
原理简单,应用方便,参数整定灵活
-
适用性强,特别是当被控对象的数学模型未知,而不能使用解析设计方法时,PID控制就显得特别有用
-
鲁棒性强,控制品质对受控对象的变化不太敏感,如受控对象受外界扰动时,无需经常改变控制器参数或结构
国际自动控制联合会(IFAC)每三年召开一次的世界大会是自动控制领域的顶级学术会议

IFAC · International Federation of Automatic Control![]() http://www.ifac-control.org/
http://www.ifac-control.org/
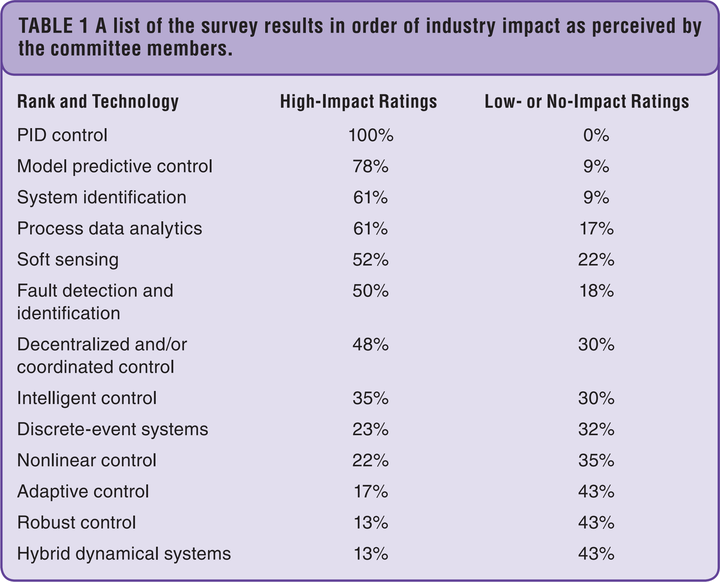
IFAC在2014年发布的一项调查报告(链接:A Survey on Industry Impact and Challenges Thereof,Tariq Samad)显示,PID控制在当时仍然是在工业领域具有最大影响力的控制技术。
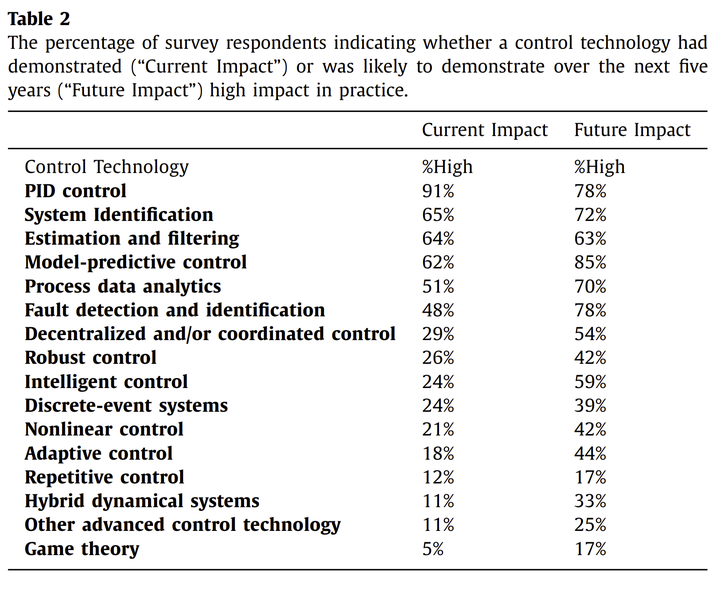
2020年在Annual Reviews in Control中发表的 Industry engagement with control research: Perspective and messages ,表明PID控制的当前影响力仍然最高,且在未来5年内可能是工业实践中影响力较高的控制技术,紧随其后的则是MPC技术。
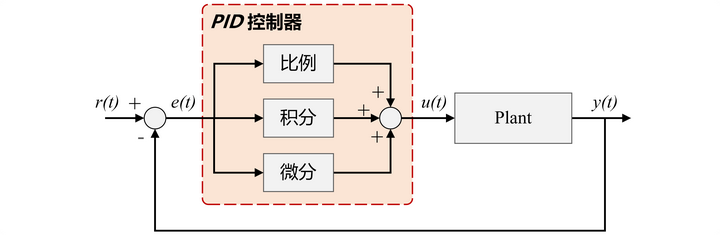
二、PID控制器基本结构与Syslab中pid函数
PID控制器基本结构
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1410
1410

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









