







本工具箱教程以控制系统模型创建、分析与设计流程为主线,通过大量示例介绍MWORKS控制系统工具箱的功能和具体使用。共计10篇文章,上一篇主要介绍了PID控制器设计。
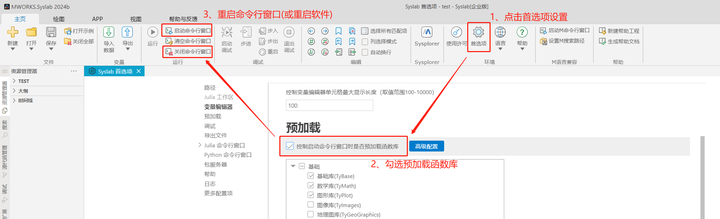
本教程代码均可直接复制到Syslab中运行,使用教程中代码前需参照下述方法加载函数库内容: 方法一:在Syslab的命令行窗口先后输入using TyControlSystems和using TyPlot并回车(重启软件或命令行窗口后需重新输入); 方法二:按照下图中的方法预加载函数库(设置好后每次启动软件默认加载)。
第八期:交互式控制系统设计APP
一、什么是控制系统设计APP?
经典控制理论有两大核心设计方法,分别是频率响应法和根轨迹法。控制系统设计器APP让用户可以使用交互式的波特图编辑器、根轨迹编辑器来添加、修改和删除控制器的极点、零点和增益,从而实现基于这两大方法的控制器设计和分析。
控制系统设计器APP支持用户自定义绘制阶跃、脉冲、波特、奈奎斯特及尼克尔斯图,通过交互式对话框的方式实现对控制器的设计,并且各绘图窗口会实时进行更新重绘,将控制器效果进行直观展示。相比传统的代码实现方式大大减少了计算、编程及后处理等所需要的时间。
二、经典控制理论核心设计方法
频率响应法: 主要应用bode图进行设计,通常的方法是先调整系统的开环增益以满足对稳态精度的要求。根据伯德图的幅值曲线和相角曲线获取幅值裕度、相角裕度、穿越频率、带宽等指标信息来为系统设计相应的校正装置;
根轨迹法: 用根轨迹法进行设计,是建立在改变系统根轨迹的基础上的,它是通过在系统开环传递函数中增加极点和零点,迫使根轨迹经过s平面内希望的闭环极点的一种方法。在设计控制系统时,如果通过改变系统增益无法实现控制要求,则必须通过引入适当的校正装置来改变原来的根轨迹。利用根轨迹法进行控制系统设计的实质是通过校正装置改变系统的根轨迹,从而使一对主导闭环极点位于需要的位置上。
本期内容基于控制系统设计器APP来展示如何利用根轨迹法进行控制器设计,并详细讲解APP应用流程。
三、控制系统设计器APP的应用
本期内容将以具体实例为基础,从“启动APP”到“指标验证”全流程的讲解控制系统设计器APP的具体使用方法:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 3950
3950

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









