






AES-自动紧急转向
AES 主动转向 紧急转向 避障系统 转向避障
五次多项式 PID控制 纯跟踪控制 MPC控制 模型预测
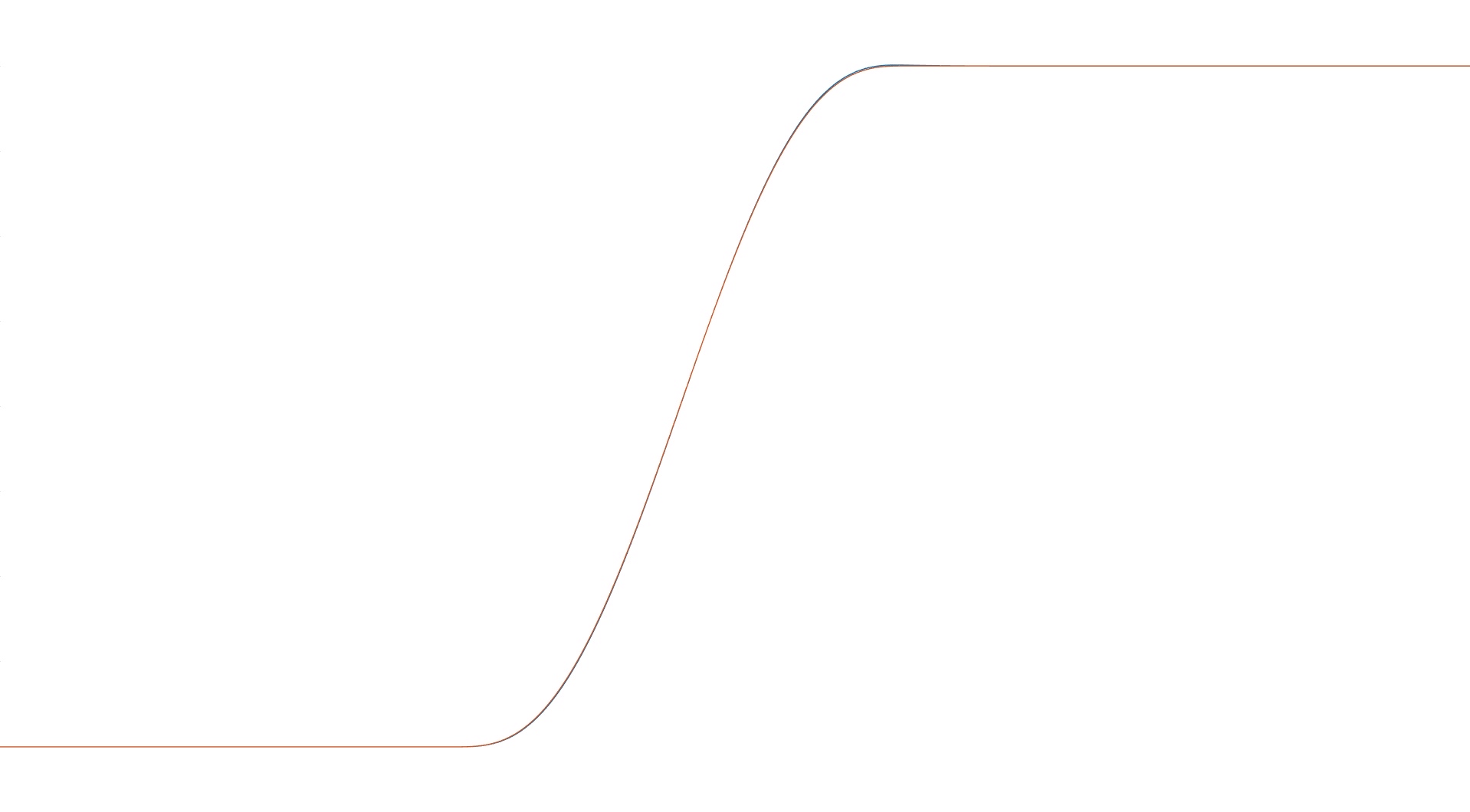
车辆行驶过程中,利用主动转向的方式躲避前方障碍物。
主要利用安全距离进行判断,并利用各种控制算法模型进行车辆转向控制。
所有资料包括:
1、相关问题的文档分析
2、simulink模型和carsim模型(simulink为2021b carsim为2019)
3、可代转simulink版本(文件中有一个转的2018a版本)
4、均包含simulink文件和cpar文件
YID:949674906973764
小呆的鹅
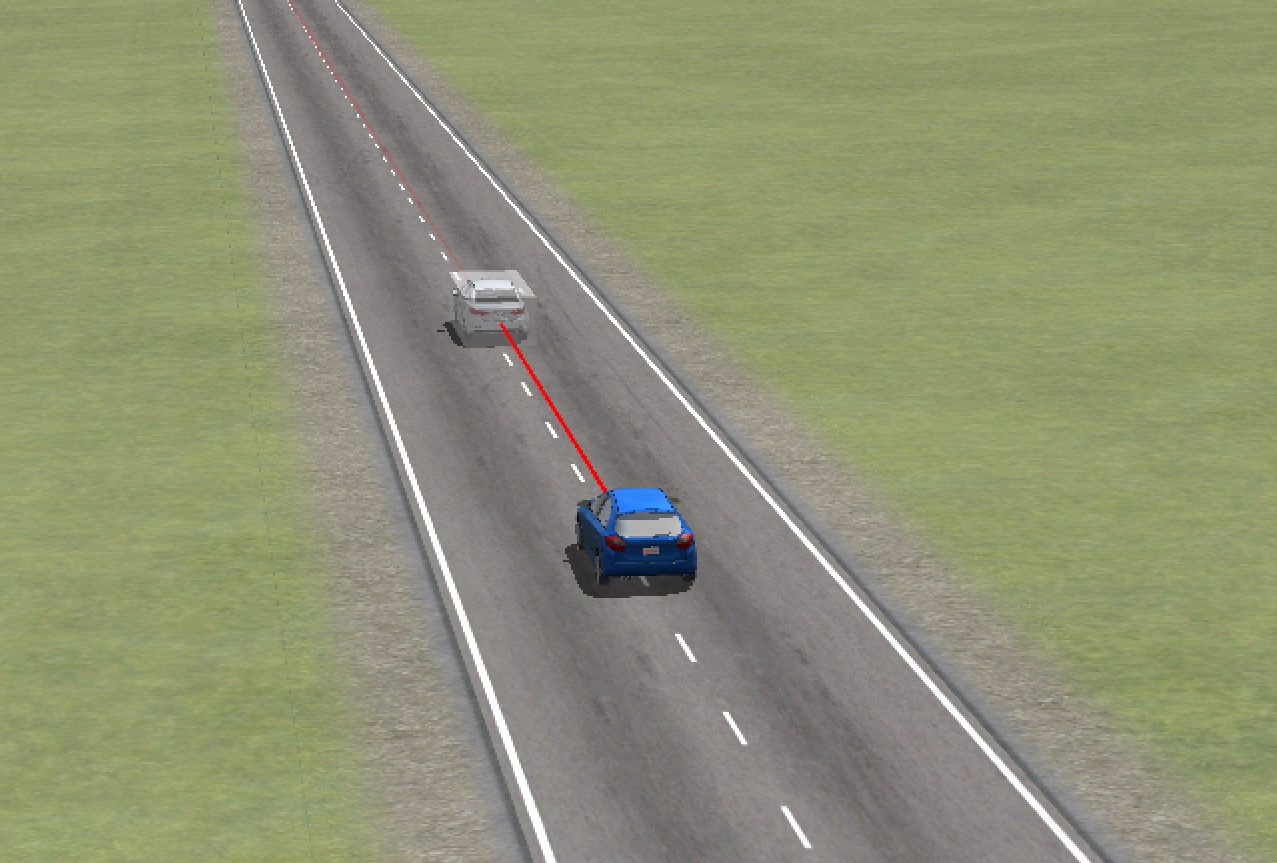
AES(Automatic Emergency Steering)是一种主动转向紧急避障系统,它可以在车辆行驶过程中通过自动转向的方式躲避前方障碍物。该系统主要通过利用安全距离进行判断,并利用各种控制算法模型进行车辆转向控制。
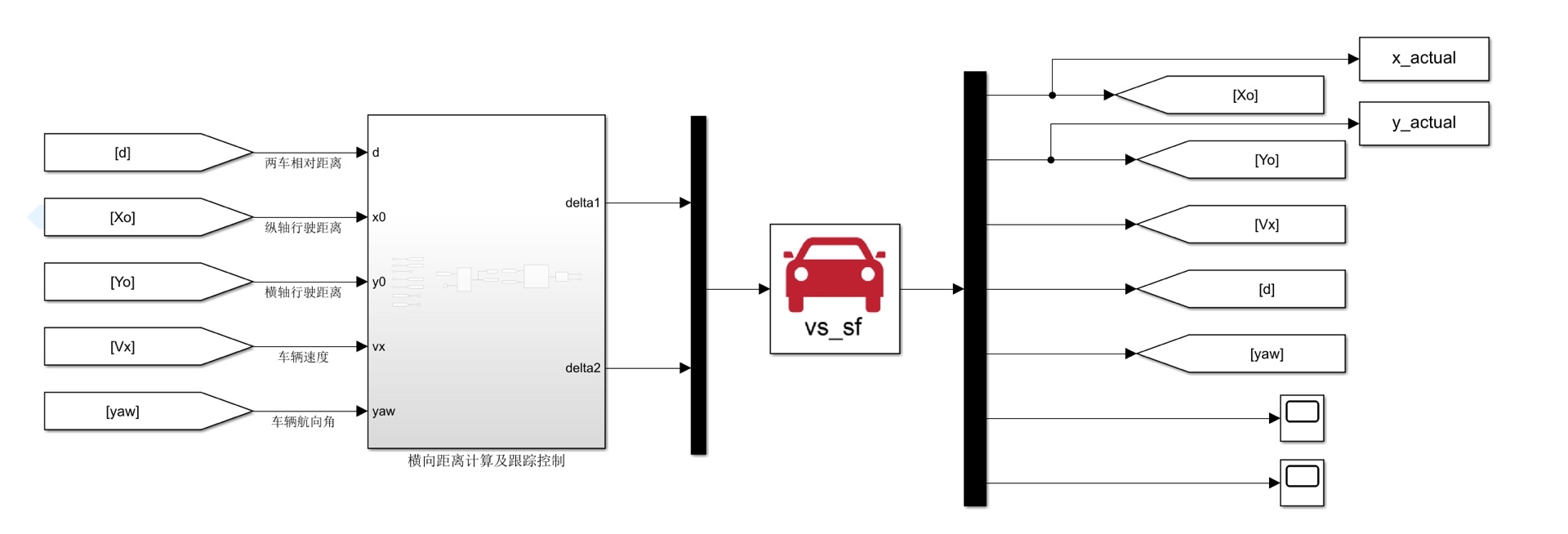
在实现AES功能的过程中,最常用的控制算法包括五次多项式控制、PID控制、纯跟踪控制以及MPC(Model Predictive Control)控制等。这些算法模型可以通过相关问题的文档分析得到,并且可以在Simulink和CarSim这两个软件平台上进行建模和仿真。
Simulink是一种功能强大的系统级建模和仿真环境,它可以帮助开发人员在软件平台上进行车辆转向控制算法的开发和测试。而CarSim是一种经过验证的车辆动力学仿真软件,它可以用于验证车辆转向控制算法的性能和安全性。
在Simulink模型和CarSim模型中,我们可以设置车辆的初始状态、障碍物的位置和运动轨迹等参数,然后通过调节控制算法的参数来实现车辆的主动转向避障功能。同时,我们还可以对Simulink版本进行适配,以满足不同版本的需求。
为了方便使用和参考,我提供了Simulink文件和CarSim文件的压缩包,其中包含了相关的模型和参数文件。这些文件可以帮助开发人员更好地理解和应用AES系统。
总之,AES-自动紧急转向系统是一种基于安全距离的主动转向避障系统,通过五次多项式控制、PID控制、纯跟踪控制和MPC控制等算法模型实现车辆转向控制。Simulink和CarSim作为仿真和验证工具,可以帮助开发人员在实现过程中进行建模和测试。希望以上提供的资料对您在研究和开发AES系统时有所帮助。
以上相关代码,程序地址:http://wekup.cn/674906973764.html















 809
809











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









