






 文章探讨了四轮轮毂电机驱动车辆的AFS和DYC/VTC系统集成控制,涉及分层控制策略、滑模及PID控制方法,旨在优化车辆稳定性与操纵性能。
文章探讨了四轮轮毂电机驱动车辆的AFS和DYC/VTC系统集成控制,涉及分层控制策略、滑模及PID控制方法,旨在优化车辆稳定性与操纵性能。
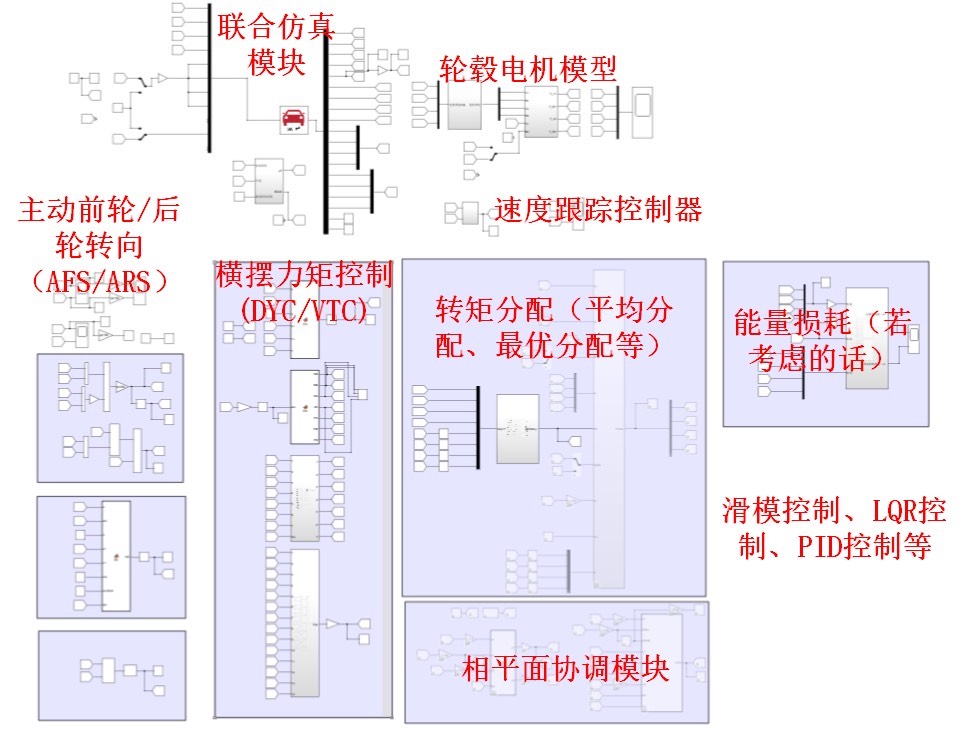
四轮轮毂电机驱动车辆AFS和DYC/VTC的联合仿真搭建、控制。
以四轮轮毂电机驱动车辆为控制对象,进行AFS/DYC的集成控制设计:
(1)DYC设计,整体采用分层控制策略。
其中顶层控制器的任务是利用车辆状态信息、横摆角速度以及质心侧偏角的误差计算出维持车辆稳定性的期望附加横摆力矩。
为了减少车辆速度影响,设计了纵向速度跟踪控制器;底层控制器的任务是对顶层控制器得到的期望附加横摆力矩以及驱动力进行分配,实现整车在高速地附着路面条件下的稳定性控制。
顶层控制器的控制方法包括:滑模控制(SMC)、LQR控制、PID控制、鲁棒控制、MPC控制等(发其中一个,默认发滑模和pid控制器)。
底层控制器的分配方法包括:平均分配、最优分配,可定制基于特殊目标函数优化的分配方法。
(2)AFS设计,根据横摆角速度和质心侧偏角的偏差计算出维持车辆稳定性所需的附加前轮转角。
控制方法:滑模控制、LQR控制、PID控制(发其中一个,默认发lqr控制器)。
最后根据相平面进行协调。
在稳定域中,单独使用AFS进行控制,改善车辆操纵稳定性,增强驾驶员的驾驶体验;在临界稳定域中,AFS和DYC同时进行控制,二者相互配合,协调进行,保证车辆稳定性的情况下改善操纵性能;在失稳状态下DYC单独控制,力求保证车辆稳定性和安全性。
说明:驾驶员模型采用CarSim自带的预瞄模型(Simulink驾驶员模型请单独购买);速度跟踪可加可不加,采用的是PID速度跟踪控制器;默认发(AFS/DYC)。
ID:14299757183747124
爱生气的二狗


四轮轮毂电机驱动车辆AFS ARS和DYC VTC的联合仿真搭建、控制
随着科技的不断进步,四轮轮毂电机驱动车辆的技术也越来越成熟。在这篇文章中,我们将讨论如何利用联合仿真搭建和控制AFS ARS和DYC VTC系统,以实现对四轮轮毂电机驱动车辆的集成控制设计。
首先,我们来看一下DYC设计。DYC设计采用了分层控制策略,分为顶层控制器和底层控制器。顶层控制器的主要任务是根据车辆状态信息、横摆角速度以及质心侧偏角的误差计算出维持车辆稳定性的期望附加横摆力矩。为了减少车辆速度的影响,我们还设计了纵向速度跟踪控制器。底层控制器的任务是对顶层控制器得到的期望附加横摆力矩以及驱动力进行分配,以实现整车在高速地附着路面条件下的稳定性控制。顶层控制器的控制方法包括滑模控制、LQR控制、PID控制、鲁棒控制、MPC控制等。而底层控制器的分配方法包括平均分配和最优分配,甚至可以根据特殊目标函数进行定制化优化的分配方法。
接下来,我们来看一下AFS设计。AFS设计的主要目标是根据横摆角速度和质心侧偏角的偏差计算出维持车辆稳定性所需的附加前轮转角。AFS的控制方法包括滑模控制、LQR控制和PID控制等。在稳定域中,我们可以单独使用AFS进行控制,以改善车辆操纵稳定性,增强驾驶员的驾驶体验。在临界稳定域中,AFS和DYC同时进行控制,二者相互配合、协调进行,旨在保证车辆稳定性的情况下改善操纵性能。在失稳状态下,DYC单独进行控制,力求保证车辆的稳定性和安全性。
值得一提的是,我们在仿真中使用的驾驶员模型采用了CarSim自带的预瞄模型(Simulink驾驶员模型请单独拿后)。另外,速度跟踪部分可选择加入或不加入,我们采用了PID速度跟踪控制器。
综上所述,通过联合仿真搭建和控制AFS ARS和DYC VTC系统,我们能够实现对四轮轮毂电机驱动车辆的集成控制设计。这一系统采用了分层控制策略,顶层控制器和底层控制器的相互配合与协调,以实现车辆的稳定性和操纵性能的优化。通过选择不同的控制方法和分配方法,我们可以根据具体需求进行个性化的设计。
请注意,由于该系统的特殊性,一旦售出将不接受退款或更换,请在购买前慎重考虑。
这篇文章详细介绍了四轮轮毂电机驱动车辆AFS ARS和DYC VTC的联合仿真搭建和控制的设计原理和方法。通过分析顶层控制器和底层控制器的任务和功能,以及不同的控制方法和分配方法,我们可以更好地理解该系统的工作原理和优化策略。这些技术在实际应用中对提升四轮轮毂电机驱动车辆的稳定性和操纵性能具有重要意义。希望这篇文章对读者能够提供有益的启发和参考,并为相关领域的技术人员提供一些思路和方法。
以上相关代码,程序地址:http://wekup.cn/757183747124.html















 1942
1942











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









