









本文转自:http://blog.csdn.net/holybin/article/details/41122493
概述
除了利用Harris进行角点检测和利用Shi-Tomasi方法进行角点检测外,还可以使用cornerEigenValsAndVecs()函数和cornerMinEigenVal()函数自定义角点检测函数。如果对角点的精度有更高的要求,可以用cornerSubPix()函数将角点定位到子像素,从而取得亚像素级别的角点检测效果。
cornerSubPix()函数
(1)函数原型
cornerSubPix()函数在角点检测中精确化角点位置,其函数原型如下:
- C++: void cornerSubPix(InputArray image, InputOutputArray corners, Size winSize, Size zeroZone, TermCriteria criteria);
- C: void cvFindCornerSubPix(const CvArr* image, CvPoint2D32f* corners, int count, CvSize win, CvSize zero_zone, CvTermCriteria criteria);
C++: void cornerSubPix(InputArray image, InputOutputArray corners, Size winSize, Size zeroZone, TermCriteria criteria);
C: void cvFindCornerSubPix(const CvArr* image, CvPoint2D32f* corners, int count, CvSize win, CvSize zero_zone, CvTermCriteria criteria);
(2)函数参数
函数参数说明如下:
image:输入图像
corners:输入角点的初始坐标以及精准化后的坐标用于输出。
winSize:搜索窗口边长的一半,例如如果winSize=Size(5,5),则一个大小为
zeroZone:搜索区域中间的dead region边长的一半,有时用于避免自相关矩阵的奇异性。如果值设为(-1,-1)则表示没有这个区域。
criteria:角点精准化迭代过程的终止条件。也就是当迭代次数超过criteria.maxCount,或者角点位置变化小于criteria.epsilon时,停止迭代过程。
代码示例
代码示例基于goodFeaturesToTrack()检测出来的角点,使用cornerSubPix()函数将角点位置精确到亚像素级精度。
- /**
- * @使用cornerSubPix()函数在goodFeaturesToTrack()的角点检测基础上将角点位置精确到亚像素级别
- * @author holybin
- */
- #include "opencv2/highgui/highgui.hpp"
- #include "opencv2/imgproc/imgproc.hpp"
- #include <iostream>
- #include <stdio.h>
- #include <stdlib.h>
- using namespace cv;
- using namespace std;
- /// 全局变量
- Mat src, srcGray;
- int maxCorners = 10; //角点个数的最大值
- int maxCornersThresh = 20; //角点个数最大值的上限(滑动条范围0-20)
- char* detectWindow = "detection";
- char* refineWindow = "refinement";
- /// 角点精准化函数声明
- void doCornerRefinement( int, void* );
- int main( int argc, char** argv )
- {
- /// 载入图像并灰度化
- src = imread( "D:\\opencv_pic\\house_small.jpg", 1 );
- cvtColor( src, srcGray, CV_BGR2GRAY );
- /// 创建显示窗口以及滑动条
- namedWindow( detectWindow, CV_WINDOW_AUTOSIZE );
- createTrackbar( "max num:", detectWindow, &maxCorners, maxCornersThresh, doCornerRefinement );
- imshow( detectWindow, src );
- doCornerRefinement( 0, 0 );
- waitKey(0);
- return(0);
- }
- /// 使用Shi-Tomasi方法检测角点,再对角点位置进行精准化
- void doCornerRefinement( int, void* )
- {
- if( maxCorners < 1 )
- maxCorners = 1;
- /// Shi-Tomasi的参数设置
- vector<Point2f> corners;
- double qualityLevel = 0.01;
- double minDistance = 10;
- int blockSize = 3;
- bool useHarrisDetector = false; //不使用Harris检测算法
- double k = 0.04;
- /// 深度拷贝原图像用于绘制角点
- Mat detectSrcCopy = src.clone();
- Mat refineSrcCopy = src.clone();
- /// 应用Shi-Tomasi角点检测算法
- goodFeaturesToTrack( srcGray,
- corners,
- maxCorners,
- qualityLevel,
- minDistance,
- Mat(), //未选择感兴趣区域
- blockSize,
- useHarrisDetector,
- k );
- /// 当maxCorners的值较小时,以下两个值基本是一样的;
- /// 当maxCorners的值较大时,实际检测到的角点数目有可能小于maxCorners,以下两个值不一样。
- cout<<"* detected corners : "<<corners.size()<<endl;
- cout<<"** max corners: "<<maxCorners<<endl;
- /// 1--显示角点检测结果
- int r = 3;
- cout<<"-- Before refinement: "<<endl;
- for( int i = 0; i < corners.size(); i++ )
- {
- // 标示出角点
- circle( detectSrcCopy, corners[i], r, Scalar(255,0,255), -1, 8, 0 );
- // 输出角点坐标
- cout<<" ["<<i<<"] ("<<corners[i].x<<","<<corners[i].y<<")"<<endl;
- }
- namedWindow( detectWindow, CV_WINDOW_AUTOSIZE );
- imshow( detectWindow, detectSrcCopy );
- /// 角点位置精准化参数
- Size winSize = Size( 5, 5 );
- Size zeroZone = Size( -1, -1 );
- TermCriteria criteria = TermCriteria(
- CV_TERMCRIT_EPS + CV_TERMCRIT_ITER,
- 40, //maxCount=40
- 0.001 ); //epsilon=0.001
- /// 计算精准化后的角点位置
- cornerSubPix( srcGray, corners, winSize, zeroZone, criteria );
- /// 2--显示精准化后的角点
- cout<<"-- After refinement: "<<endl;
- for( int i = 0; i < corners.size(); i++ )
- {
- // 标示出角点
- circle( refineSrcCopy, corners[i], r, Scalar(255,0,255), -1, 8, 0 );
- // 输出角点坐标
- cout<<" ["<<i<<"] ("<<corners[i].x<<","<<corners[i].y<<")"<<endl;
- }
- namedWindow( refineWindow, CV_WINDOW_AUTOSIZE );
- imshow( refineWindow, refineSrcCopy );
- cout<<endl;
- }
/**
* @使用cornerSubPix()函数在goodFeaturesToTrack()的角点检测基础上将角点位置精确到亚像素级别
* @author holybin
*/
#include "opencv2/highgui/highgui.hpp"
#include "opencv2/imgproc/imgproc.hpp"
#include <iostream>
#include <stdio.h>
#include <stdlib.h>
using namespace cv;
using namespace std;
/// 全局变量
Mat src, srcGray;
int maxCorners = 10; //角点个数的最大值
int maxCornersThresh = 20; //角点个数最大值的上限(滑动条范围0-20)
char* detectWindow = "detection";
char* refineWindow = "refinement";
/// 角点精准化函数声明
void doCornerRefinement( int, void* );
int main( int argc, char** argv )
{
/// 载入图像并灰度化
src = imread( "D:\\opencv_pic\\house_small.jpg", 1 );
cvtColor( src, srcGray, CV_BGR2GRAY );
/// 创建显示窗口以及滑动条
namedWindow( detectWindow, CV_WINDOW_AUTOSIZE );
createTrackbar( "max num:", detectWindow, &maxCorners, maxCornersThresh, doCornerRefinement );
imshow( detectWindow, src );
doCornerRefinement( 0, 0 );
waitKey(0);
return(0);
}
/// 使用Shi-Tomasi方法检测角点,再对角点位置进行精准化
void doCornerRefinement( int, void* )
{
if( maxCorners < 1 )
maxCorners = 1;
/// Shi-Tomasi的参数设置
vector<Point2f> corners;
double qualityLevel = 0.01;
double minDistance = 10;
int blockSize = 3;
bool useHarrisDetector = false; //不使用Harris检测算法
double k = 0.04;
/// 深度拷贝原图像用于绘制角点
Mat detectSrcCopy = src.clone();
Mat refineSrcCopy = src.clone();
/// 应用Shi-Tomasi角点检测算法
goodFeaturesToTrack( srcGray,
corners,
maxCorners,
qualityLevel,
minDistance,
Mat(), //未选择感兴趣区域
blockSize,
useHarrisDetector,
k );
/// 当maxCorners的值较小时,以下两个值基本是一样的;
/// 当maxCorners的值较大时,实际检测到的角点数目有可能小于maxCorners,以下两个值不一样。
cout<<"* detected corners : "<<corners.size()<<endl;
cout<<"** max corners: "<<maxCorners<<endl;
/// 1--显示角点检测结果
int r = 3;
cout<<"-- Before refinement: "<<endl;
for( int i = 0; i < corners.size(); i++ )
{
// 标示出角点
circle( detectSrcCopy, corners[i], r, Scalar(255,0,255), -1, 8, 0 );
// 输出角点坐标
cout<<" ["<<i<<"] ("<<corners[i].x<<","<<corners[i].y<<")"<<endl;
}
namedWindow( detectWindow, CV_WINDOW_AUTOSIZE );
imshow( detectWindow, detectSrcCopy );
/// 角点位置精准化参数
Size winSize = Size( 5, 5 );
Size zeroZone = Size( -1, -1 );
TermCriteria criteria = TermCriteria(
CV_TERMCRIT_EPS + CV_TERMCRIT_ITER,
40, //maxCount=40
0.001 ); //epsilon=0.001
/// 计算精准化后的角点位置
cornerSubPix( srcGray, corners, winSize, zeroZone, criteria );
/// 2--显示精准化后的角点
cout<<"-- After refinement: "<<endl;
for( int i = 0; i < corners.size(); i++ )
{
// 标示出角点
circle( refineSrcCopy, corners[i], r, Scalar(255,0,255), -1, 8, 0 );
// 输出角点坐标
cout<<" ["<<i<<"] ("<<corners[i].x<<","<<corners[i].y<<")"<<endl;
}
namedWindow( refineWindow, CV_WINDOW_AUTOSIZE );
imshow( refineWindow, refineSrcCopy );
cout<<endl;
}
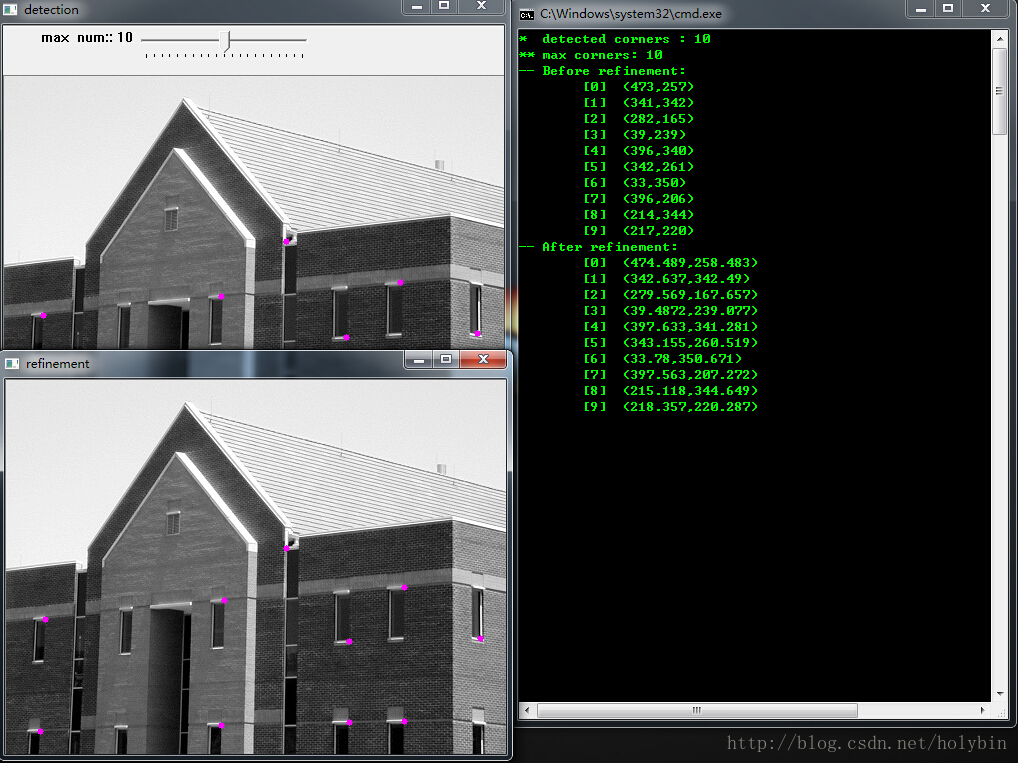
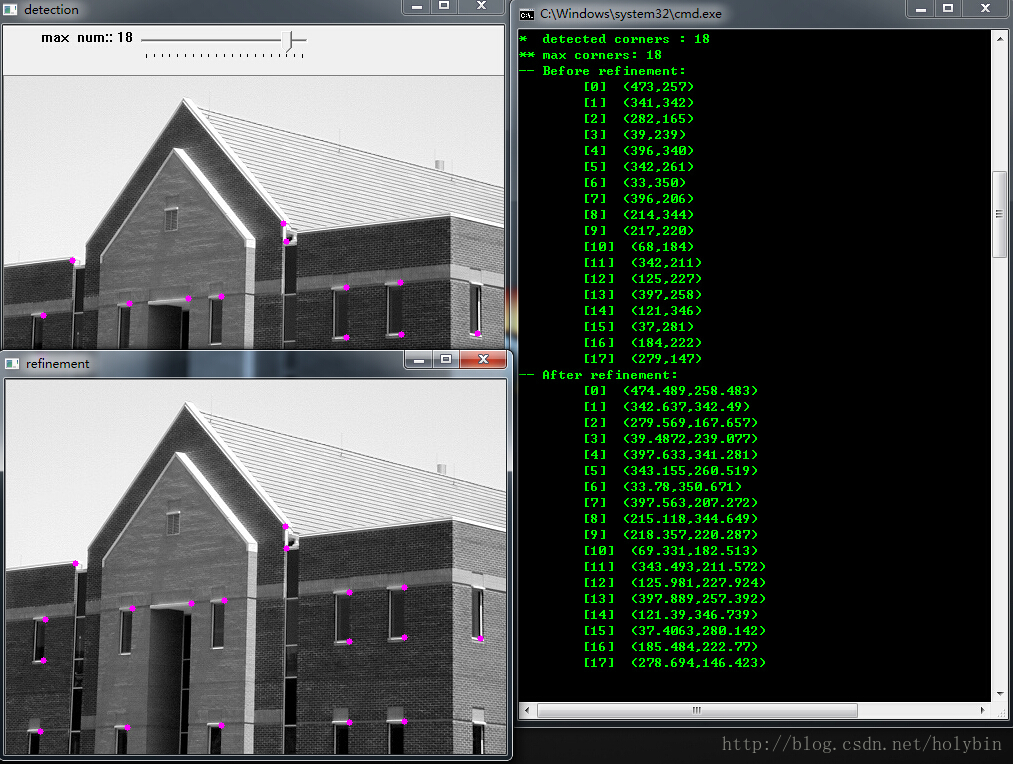
实验结果:














 8169
8169











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









