






伺服系统机械特性分析频率特性辨识Matlab仿真
1.模型简介
模型为伺服系统机械特性分析频率特性分析仿真,机械特性分析是基于速度环,主要的目的是为了辨识系统的谐振点。
仿真采用离散的传递函数进行搭建,包括电流环和速度环,以及振动模型。
还有激励信号发生器。
2.算法简介
该仿真中激励信号选择为Chirp信号,可手动更改起始频率、终止频率以及扫频速度。
机械特性分析分为两种模式,一种是开环频率特性、另一种是闭环频率特性,并且可以选择刚性系统和双惯量系统。
双惯量系统可手动设置反谐振频率和谐振频率,能够自动计算出机械参数。
3.仿真效果
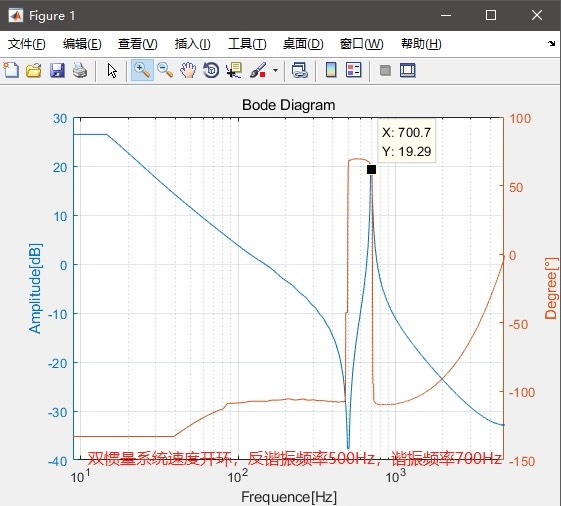
1 设置双惯性系统的反谐振频率为500Hz,谐振频率为700Hz时的开环频率特性,图1中标出了反谐振频率为500Hz,辨识结果与理论相同。
2 设置双惯量系统的反谐振频率为500Hz,谐振频率为700Hz时的开环频率特性,图2中标出了谐振频率为700Hz,辨识结果与理论相同。
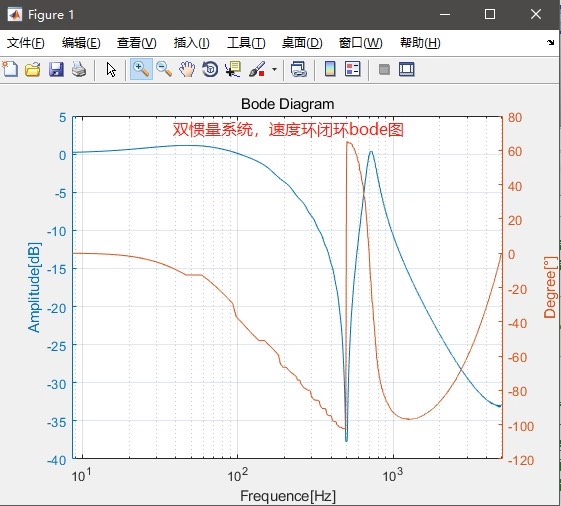
3 设置双惯量系统的反谐振频率为500Hz,谐振频率为700Hz时的闭环频率特性。
如图3所示。
4 刚性系统的速度环开环频率特性辨识结果如图4所示。
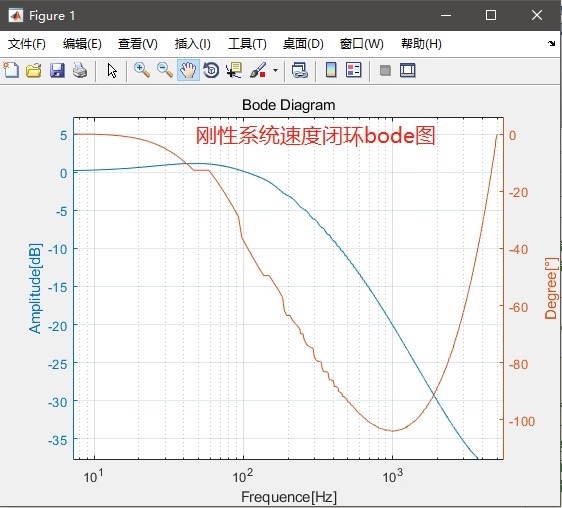
5 刚性系统的速度环闭环频率特性辨识结果如图5所示。
4.
可提供模型内相关算法的参考文献,避免大 量阅读文献浪费时间。
【注】 模型已搭建完毕,原则上不会做任何修改。
ID:34259731664851553
怎落笔都不对


伺服系统是现代控制系统中常见的一种应用,广泛应用于工业自动化、机械控制等领域。伺服系统的机械特性分析是一个重要的研究方向,通过对伺服系统的频率特性进行辨识,可以了解系统的谐振点及其相应的机械参数。本文基于Matlab软件,通过仿真的方式对伺服系统的机械特性进行分析,并对仿真结果进行了详细的介绍和分析。
-
模型简介
伺服系统机械特性分析频率特性分析仿真模型主要包括以下几个部分:电流环、速度环、振动模型和激励信号发生器。在搭建模型时,采用了离散的传递函数来描述系统的动态行为。 -
算法简介
本文采用了Chirp信号作为激励信号,在仿真过程中可以手动调整起始频率、终止频率和扫频速度。机械特性分析分为两种模式:开环频率特性和闭环频率特性。此外,还可以选择刚性系统和双惯量系统进行分析。双惯量系统可以手动设置反谐振频率和谐振频率,并且能够自动计算出系统的机械参数。 -
仿真效果
通过对不同设置下的开环频率特性和闭环频率特性进行仿真,得到了如下几个仿真结果:
- 设置双惯量系统的反谐振频率为500Hz,谐振频率为700Hz时的开环频率特性结果与理论相符。
- 设置双惯量系统的反谐振频率为500Hz,谐振频率为700Hz时的闭环频率特性结果如图3所示。
- 刚性系统的速度环的开环频率特性辨识结果如图4所示。
- 刚性系统的速度环的闭环频率特性辨识结果如图5所示。
- 参考文献
本文提供了模型内相关算法的参考文献,可以帮助读者深入学习和了解伺服系统的机械特性分析方法,避免了大量阅读文献的时间浪费。
通过以上的分析和仿真结果,可以清晰地了解伺服系统的机械特性及其频率特性。本文通过Matlab仿真的方式,实现了对伺服系统机械特性的分析和辨识,为后续的系统设计和优化提供了参考依据。同时,本文还提供了模型相关算法的参考文献,为读者深入学习和研究伺服系统提供了方向。希望本文能够对读者在伺服系统领域的学习和研究有所帮助。
以上相关代码,程序地址:http://wekup.cn/731664851553.html















 524
524

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









