






abb各种型号机器人仿真irb120、irb6500、irb140、irb2400
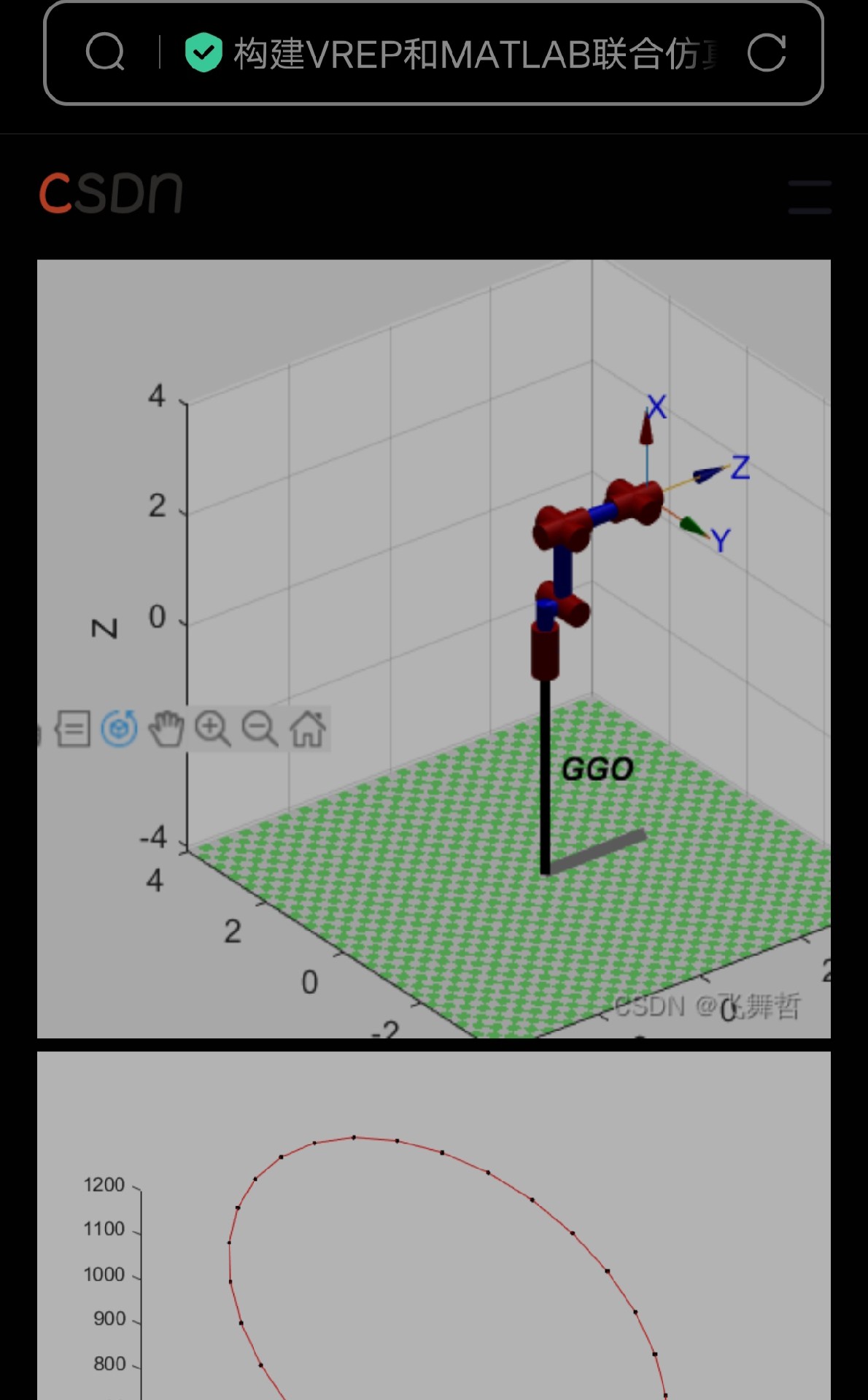
构建VREP和MATLAB联合仿真实验平台,控制机械臂末端按照固定轨迹移动。
主要工作如下:
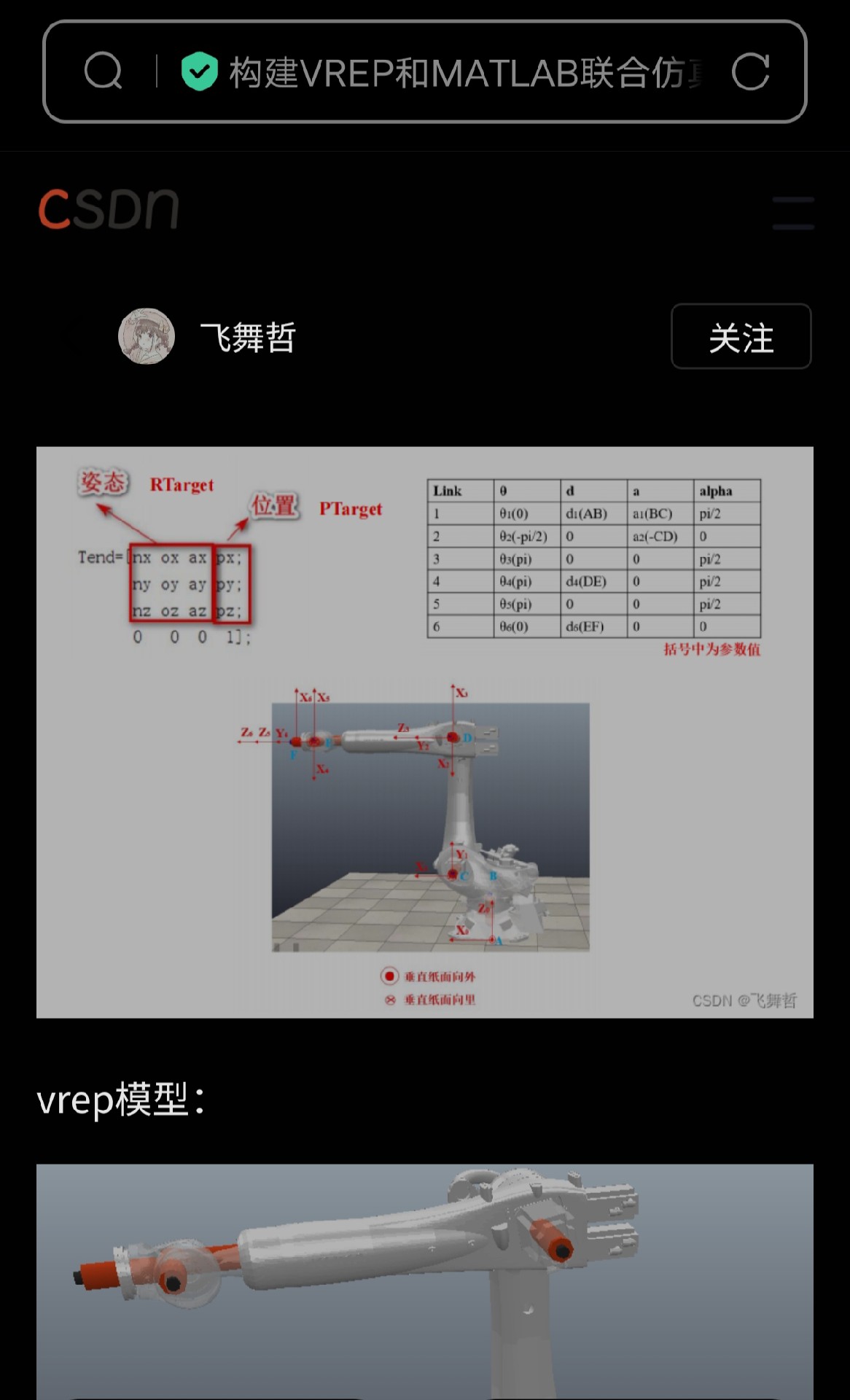
(1)构建DH坐标系,建立机械臂的正运动学模型;
(2)求解机械臂的逆运动学模型;
(3)规划末端执行器运动轨迹;
(4)编写MATLAB控制程序,控制机械臂按规划轨迹运动;
ID:67100754797722061
fwzfwz

相关的代码,程序地址如下:http://lanzoup.cn/754797722061.html
















 2424
2424

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









