






MATLAB仿真 delta并联机器人 simulink/simscape仿真 正逆运动学
ID:56199668692782339
爱小马的海盐大傻

MATLAB仿真是一种应用广泛的技术手段,可以用于实现各种复杂系统的模拟与分析。其中,delta并联机器人是近年来在工业自动化领域引起广泛关注的一种新型机器人结构,具有较高的精度和快速的运动特性。本文将使用MATLAB中Simulink和Simscape工具箱进行仿真,进一步探究delta并联机器人的正逆运动学问题。
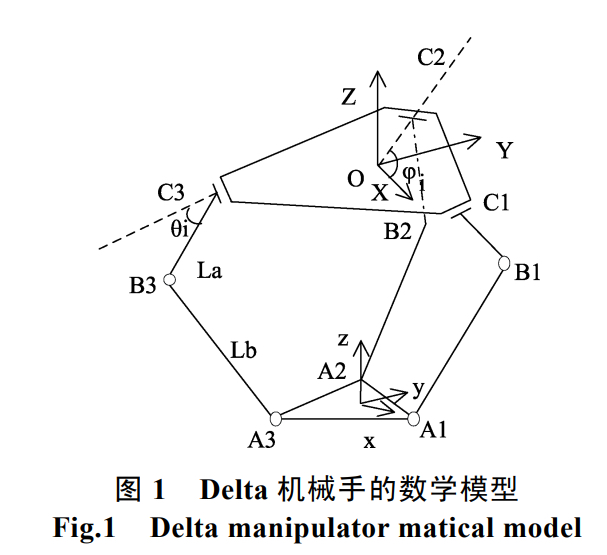
首先,我们需要了解delta并联机器人的结构特点。与传统的串联机器人相比,delta并联机器人采用了三个并联的运动平台,每个运动平台由三个电机组成,通过杆件将运动平台与末端执行器连接。这种结构设计使得delta机器人具有较高的刚度和负载能力,同时在运动过程中可以保持平稳、快速的运动特性。
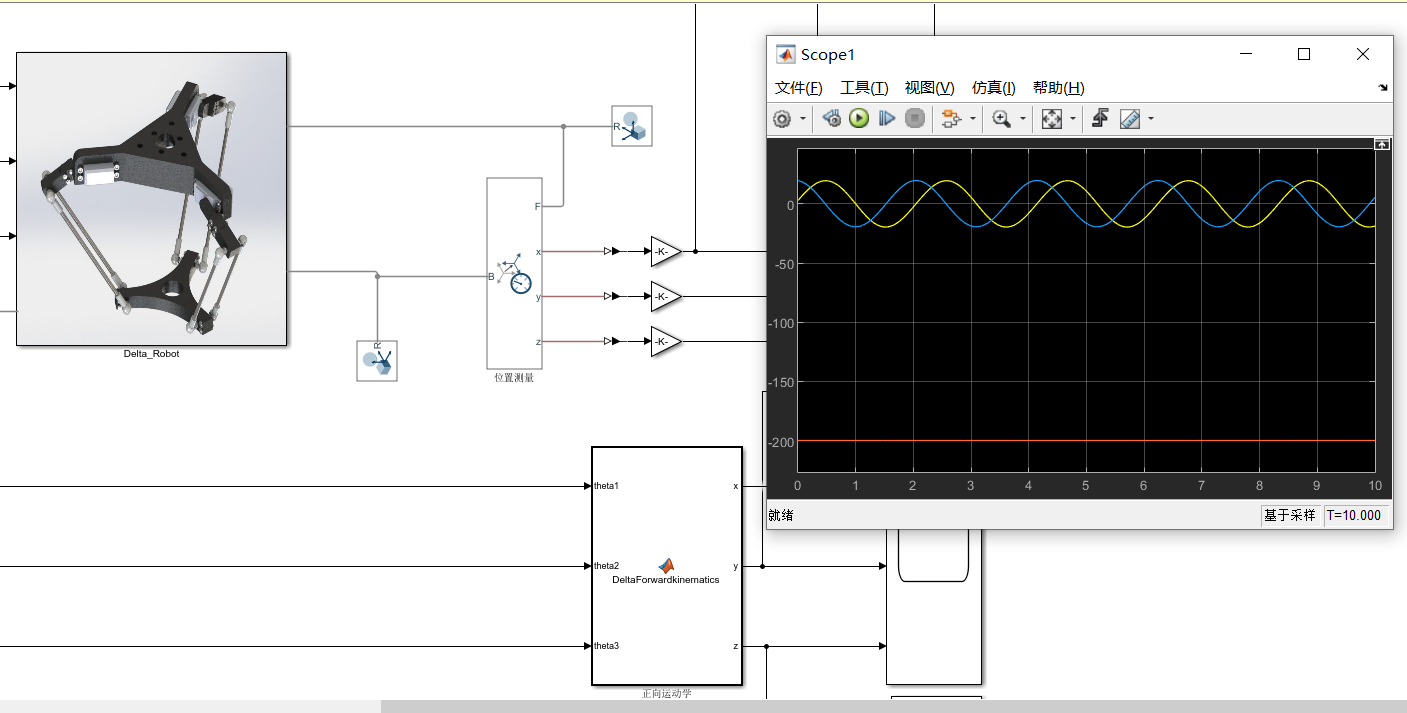
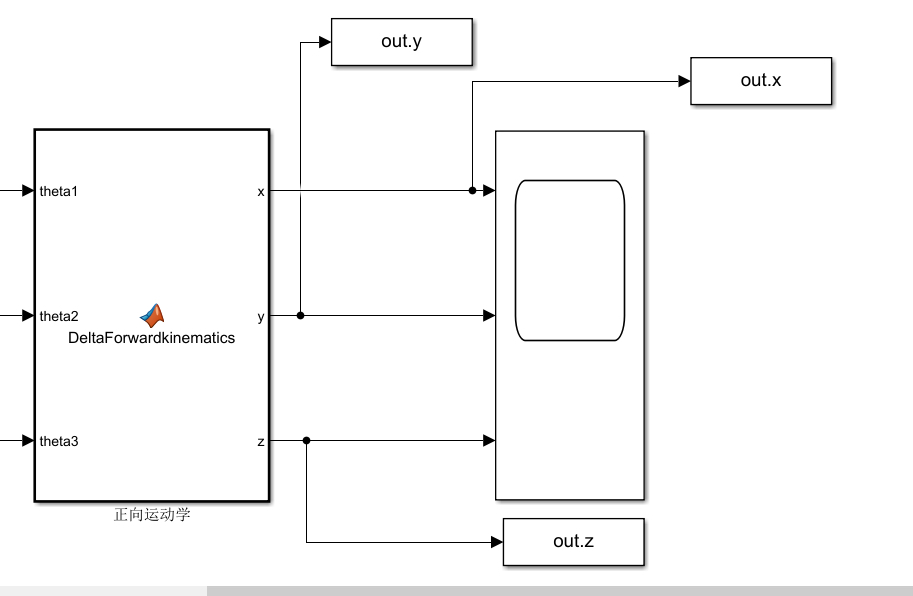
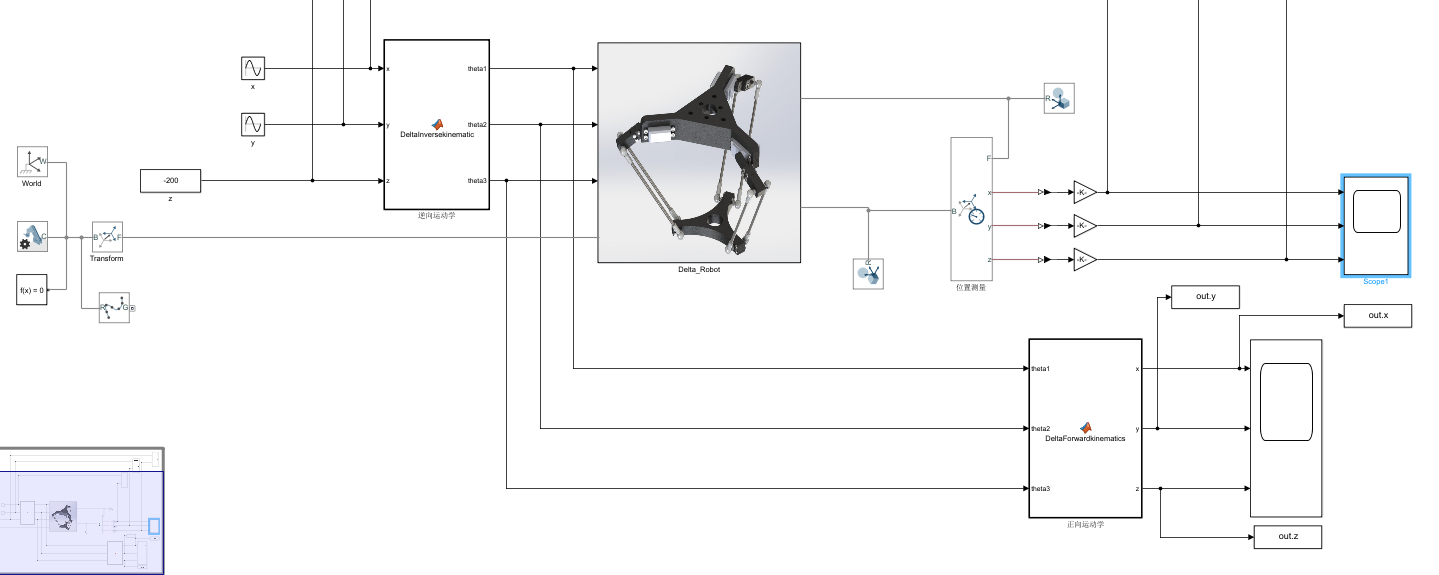
在进行仿真之前,我们需要建立delta并联机器人的数学模型。根据机器人运动学原理,我们可以通过正运动学方程将关节角度转换为末端执行器的位置坐标。而逆运动学方程则可以将末端执行器的位置坐标转换为关节角度。通过Simulink工具箱,我们可以将这些运动学方程实现为模块化的仿真模型,并进行仿真验证。
仿真过程中,我们还需要考虑delta机器人的动力学特性。动力学模型可以描述机器人在运动过程中所受到的力和力矩,并分析其对机器人系统性能的影响。在MATLAB中,Simscape工具箱可以提供丰富的物理元件模型和运动学算法,帮助我们构建机器人系统的动力学模型。通过仿真分析,我们可以研究机器人在不同工作负载下的动态响应和稳定性能。
除了动力学分析,我们还可以利用仿真平台进行控制算法的验证和优化。delta并联机器人的控制问题是实现其快速、精确运动的关键。常用的控制算法包括PID控制、模糊控制和自适应控制等。通过在Simulink中建立控制模块,并将
相关的代码,程序地址如下:http://nodep.cn/668692782339.html
















 1111
1111

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









