






 本文通过MATLAB的Simulink和Simscape工具,详细探讨了delta并联机器人的正逆运动学,包括其结构、运动模型及计算方法,并通过实际案例进行仿真验证,展示了MATLAB在机器人运动学研究中的应用。
本文通过MATLAB的Simulink和Simscape工具,详细探讨了delta并联机器人的正逆运动学,包括其结构、运动模型及计算方法,并通过实际案例进行仿真验证,展示了MATLAB在机器人运动学研究中的应用。
MATLAB仿真 delta并联机器人 simulink simscape仿真 正逆运动学
标题:MATLAB仿真与delta并联机器人的正逆运动学分析
摘要:本文通过MATLAB仿真平台,结合Simulink和Simscape工具,对delta并联机器人的运动学问题进行了研究和分析。首先介绍了delta并联机器人的概念和结构,然后详细描述了正逆运动学的基本原理和计算方法。接着,利用MATLAB的仿真功能,对delta并联机器人的正逆运动学进行了实际案例分析,并通过仿真结果验证了理论计算的正确性。最后,总结了本文的研究成果,并展望了未来可能的拓展方向。
1. 引言
delta并联机器人作为一种特殊的机器人结构,在工业自动化领域具有广泛的应用前景。其特点是结构紧凑、负载能力强、速度快、精度高等,因此在装配、搬运、喷涂等工业领域具有很大的优势。为了更好地理解和改进delta并联机器人的运动学性能,本文通过MATLAB仿真平台对其进行了研究。
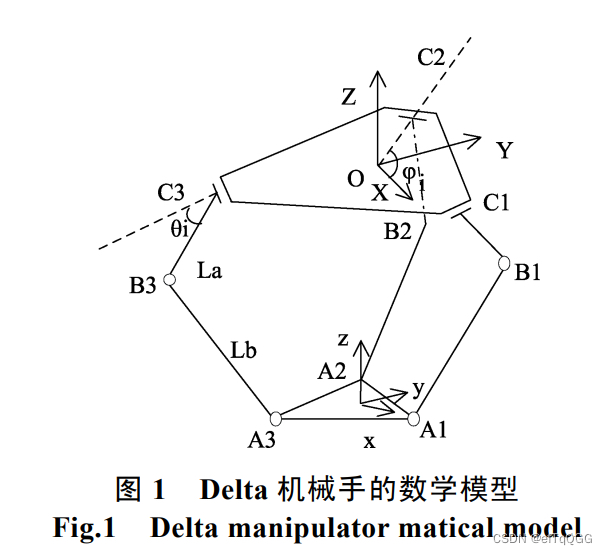
2. delta并联机器人的概述
介绍delta并联机器人的基本概念和结构。包括机械结构、驱动方式、工作空间等方面的基本特性。通过图示和文字说明,帮助读者理解delta并联机器人的构造和工作原理。
3. 正运动学分析
介绍delta并联机器人的正运动学问题,即已知各个驱动杆的长度和绝对位置,求解末端执行器的坐标。详细推导了正运动学的数学模型和计算方法,包括三角函数的运用和矩阵计算等。通过实例分析,展示了正运动学的应用过程和结果。
4. 逆运动学分析
介绍delta并联机器人的逆运动学问题,即已知末端执行器的坐标,求解各个驱动杆的长度和绝对位置。详细推导了逆运动学的数学模型和计算方法,包括三角函数的反向运用和矩阵计算等。通过实例分析,展示了逆运动学的应用过程和结果。
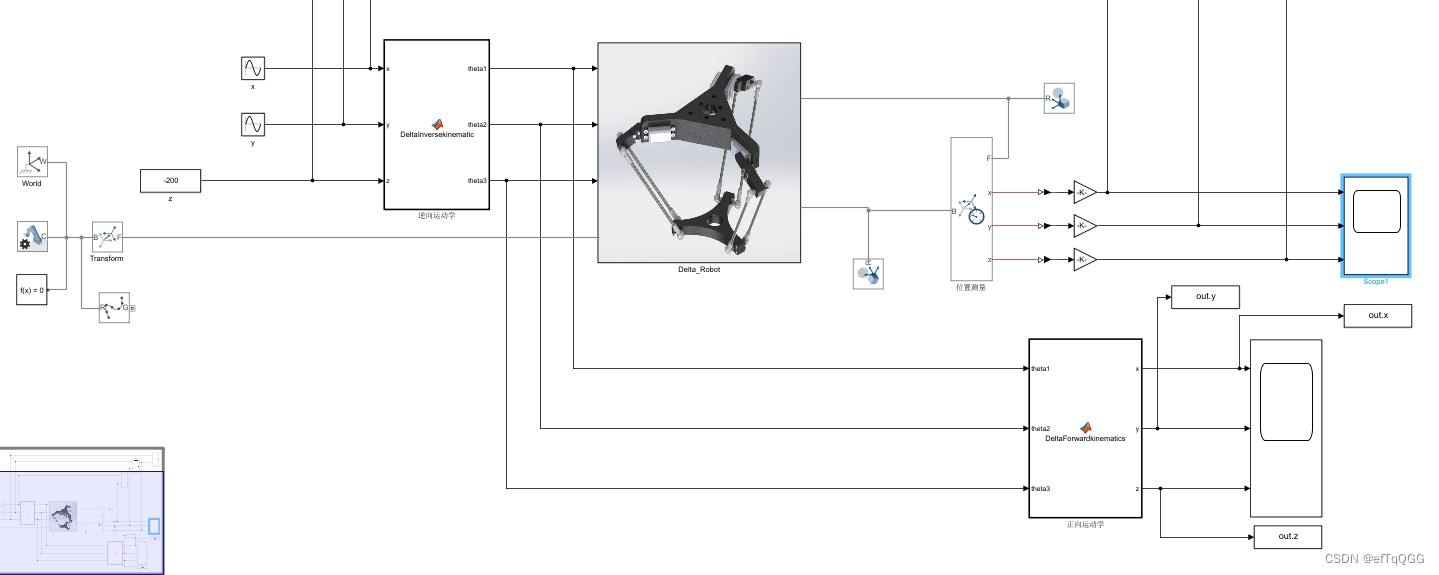
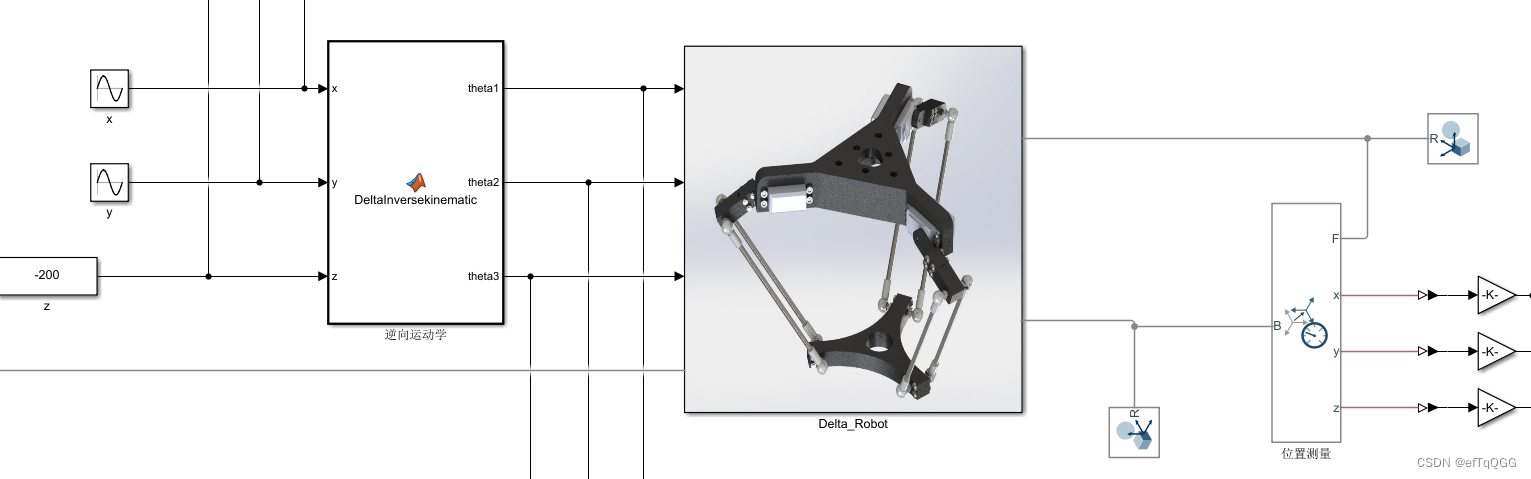
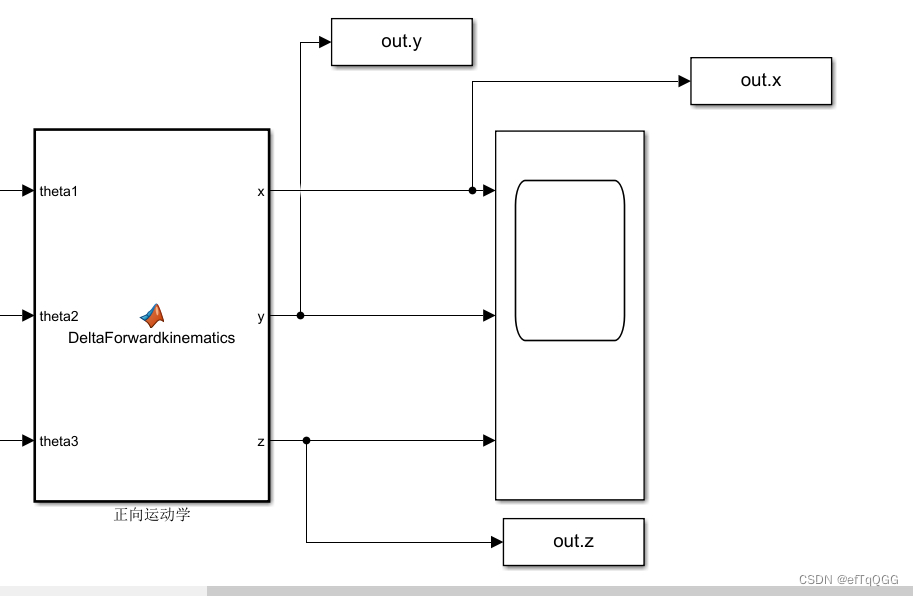
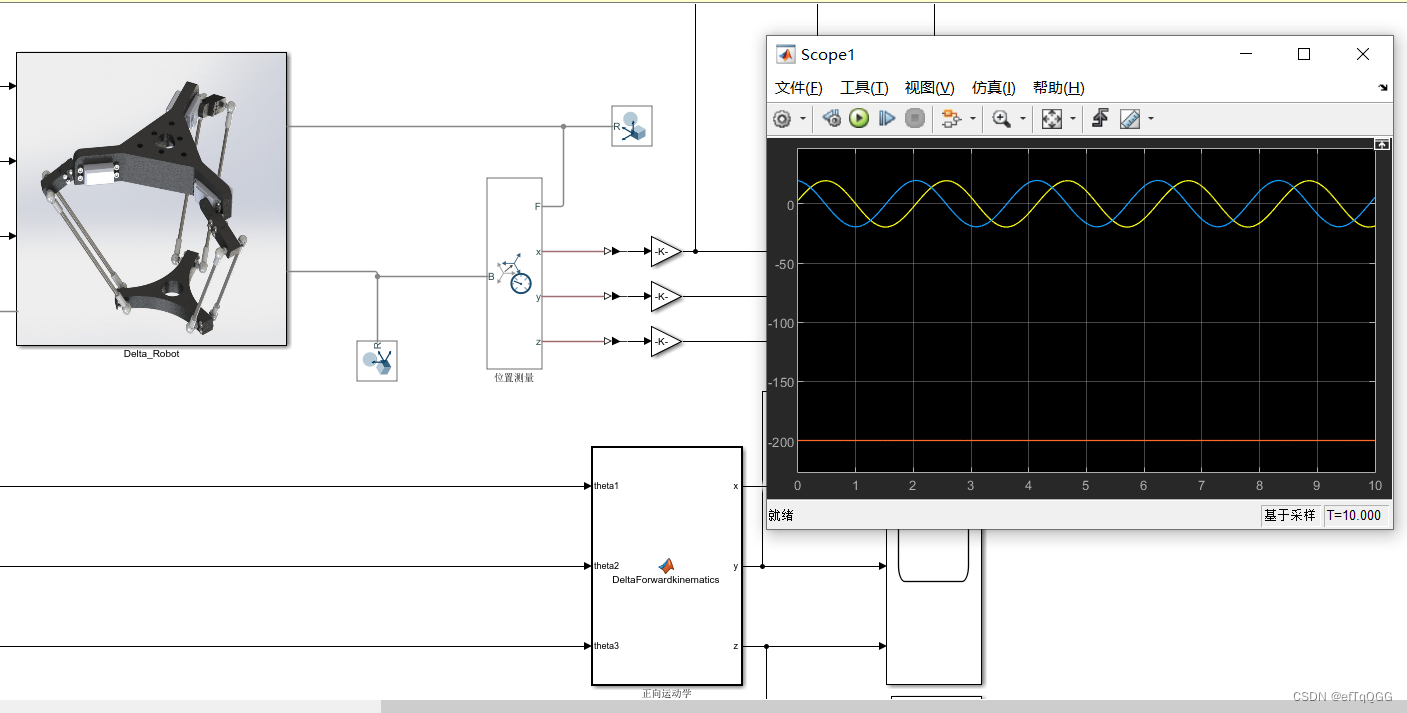
5. MATLAB仿真分析
利用MATLAB的Simulink和Simscape工具,建立了delta并联机器人的仿真模型。详细介绍了仿真模型的建立过程和参数设置,以及仿真结果的分析和验证。通过仿真实验,展示了delta并联机器人的正逆运动学计算结果与仿真结果的一致性。
6. 结果与讨论
总结了本文的研究成果,包括
相关代码,程序地址:http://lanzoup.cn/668692782339.html


















 743
743

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









