






小编今天看到这样一个我们可能在实际应用中遇到的问题: 当 PMOS 用作高边开关时,在大电流关断的情况下会出现损坏故障。
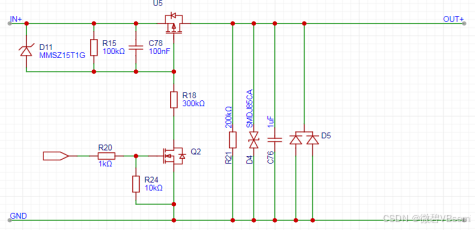
此电路输入侧是 15KW 整流模块,输出侧接 8 Ω固定负载电阻。整流模块可调节输出电压与电流。
测试发现,整流模块输出为 40V/5A、48V/6A、56V/7A ,空载分别为 100V/0A、48V/0A、56V/0A 时,PMOS 开关正常。但设置为 64V/8A(空载 64V/0A )时,PMOS 能导通,关断却短路。更换 PMOS 后,设置为 80V/10A ,关断仍短路。
为什么会出现这样的故障呢?
这种短路故障可能是由PMOS的过流或过压导致的。高负载下,PMOS 需承受较大电流与电压,超出额定值就易开关失效。PMOS 作为高边开关,关断时若不能快速切断电流,也可能再次导通致短路。同时,驱动电路若无法提供足够电流和电压驱动 PMOS,也会使其开关异常。
那怎么解决这个问题呢?可以换用更高功率和电流额定值的 PMOS,增强其负载承受力。也可以在控制电路中增加过流、过压保护电路,给 PMOS 加上一层 “保护罩”。另外,一定要保证驱动电路和 PMOS 的参数是匹配的,这样 PMOS 才能正常工作。

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









