






ROS概念

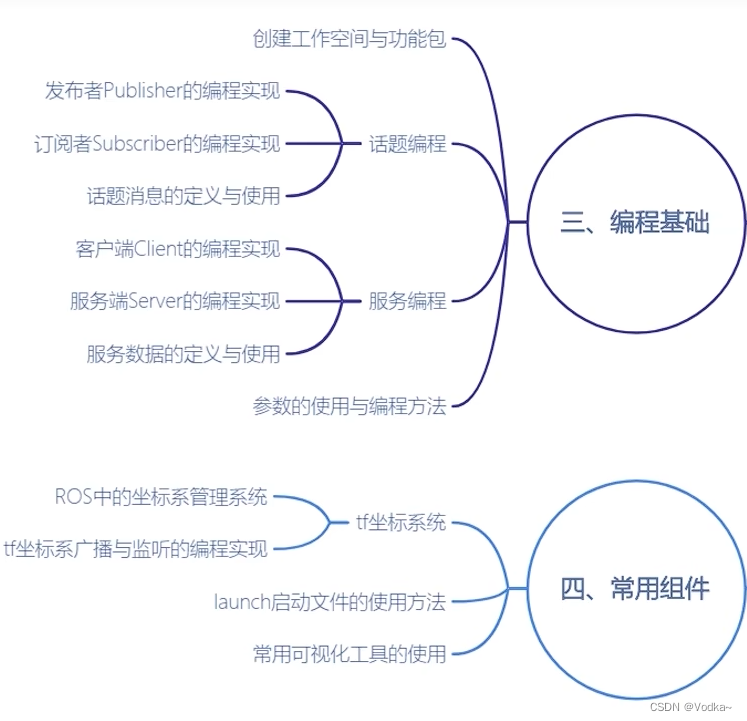
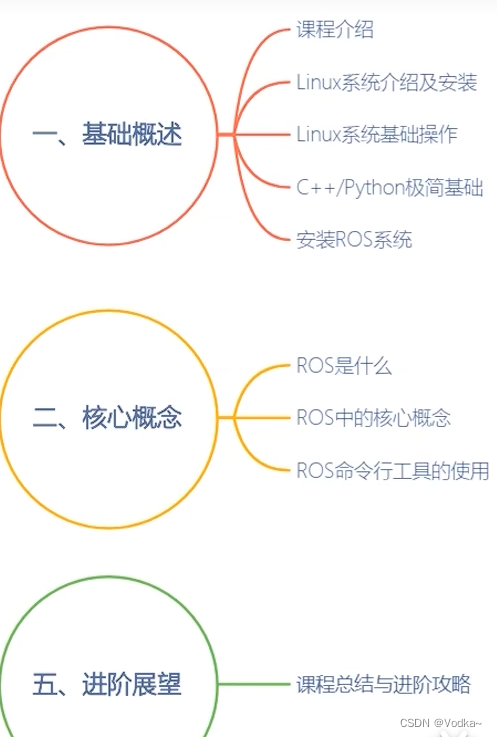
学习路线
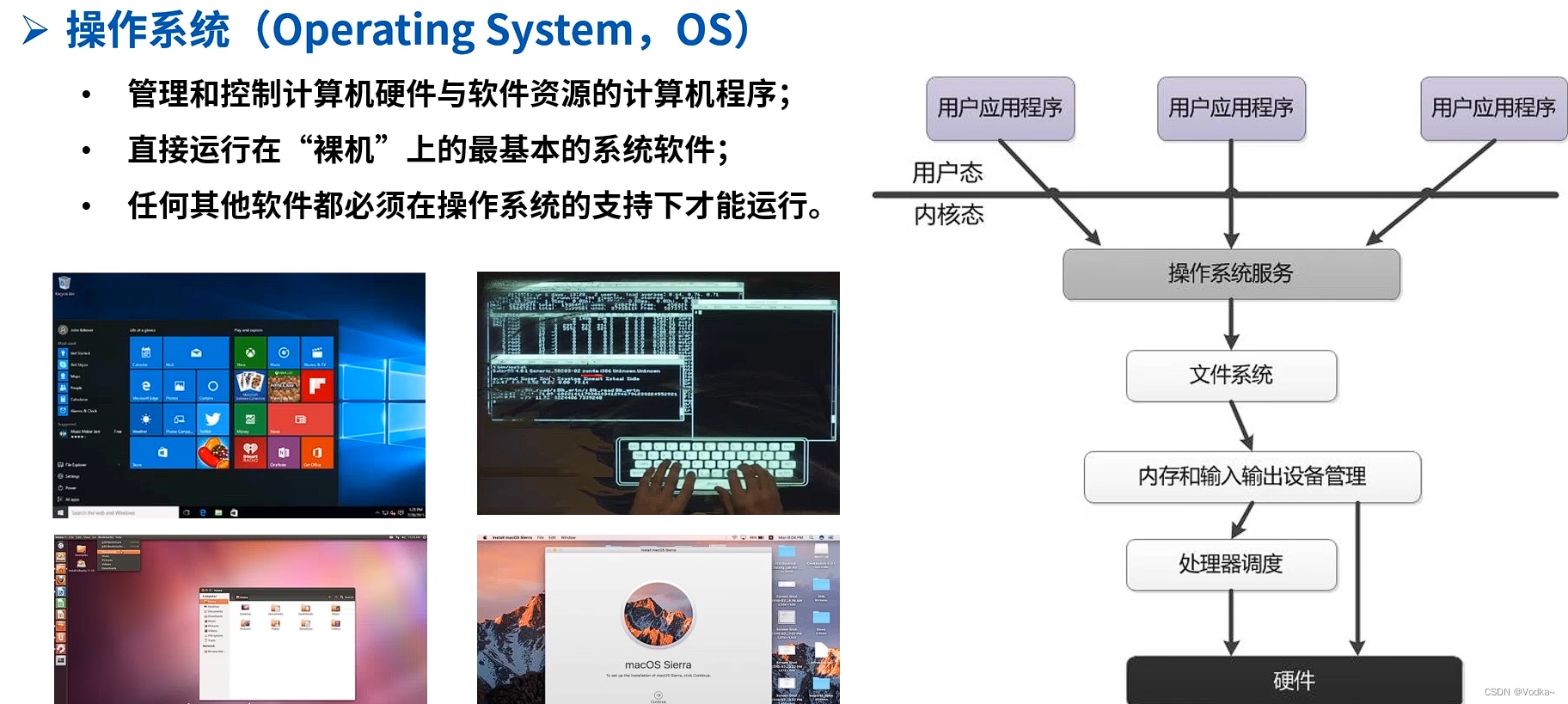
操作系统
Linux环境下编译执行c++文件(需安装vim超文本编辑器)
sudo g++ MyCoding.cpp -o CodeTest //生成一个名字为CodeTest的可执行文件
sudo ./CodeTest //执行c++文件
版本问题
ROS Melodic Morenia 和 ROS Noetic Ninjemys 是 Robot Operating System (ROS) 1.x 系列中的两个不同版本,它们之间存在一些关键区别:
发布日期和支持的Ubuntu版本:
Melodic:发布于2018年,主要支持Ubuntu 18.04 LTS(Bionic Beaver)。它是为该版本的Ubuntu优化的ROS版本。
Noetic:发布于2020年,支持Ubuntu 20.04 LTS(Focal Fossa)。随着Ubuntu 20.04的发布,Noetic成为当时ROS 1系列的最新版本,并针对该版本的Ubuntu进行了优化。
C++标准和Python支持:
Noetic 标志着ROS 1系列的一个重要转变,因为它要求使用C++14标准进行编译,而Melodic使用的是较旧的C++标准。此外,Noetic还要求Python 3,反映了Python社区从Python 2向Python 3的迁移趋势,而Melodic主要支持Python 2。
功能和兼容性:
Noetic 相对于 Melodic,包含了一些新功能和改进,提供了更好的库支持和更广泛的软件包兼容性。Noetic还可能包括对多目标操作系统的增强支持,尽管这一点可能更多体现在具体软件包和功能的实现细节上。
长期支持状态:
由于ROS的发展路线,Noetic作为ROS 1的最后一个LTS版本,标志着ROS 1系列的一个时代结束。而Melodic在其生命周期结束之后,对于希望继续使用ROS 1的用户而言,Noetic成为了推荐的选择,直到他们过渡到ROS 2。
社区和未来支持:
随着ROS 2的推进,ROS 1的维护和社区关注度可能会逐渐减少。Noetic作为较新的版本,可能在一段时间内还能获得更多的社区支持和软件包更新,但长远来看,ROS 2将成为主流。
根据网上教程安装好ROS(要注意ubantu版本与ROS版本对应)
跑通海龟小程序
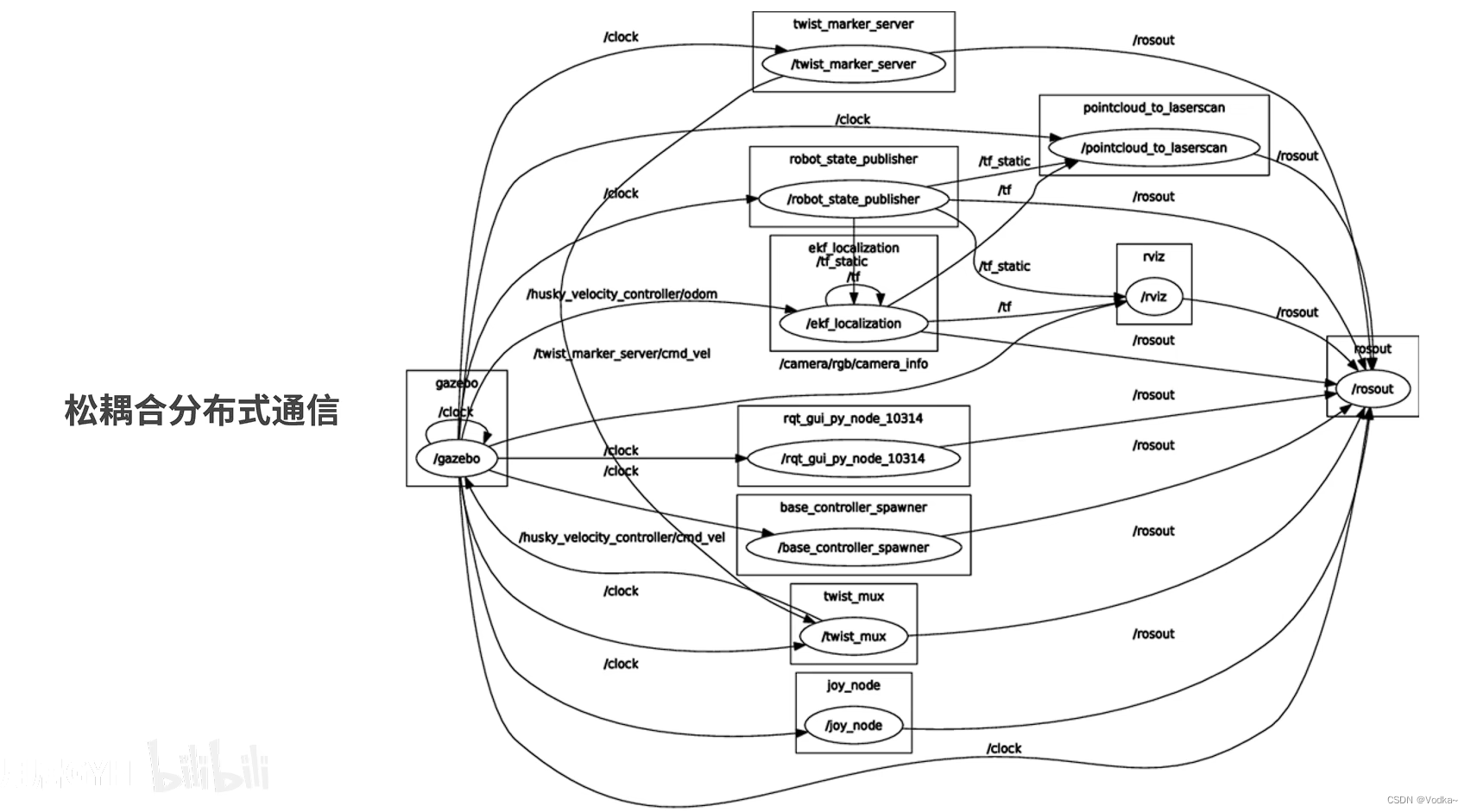
ROS通信机制
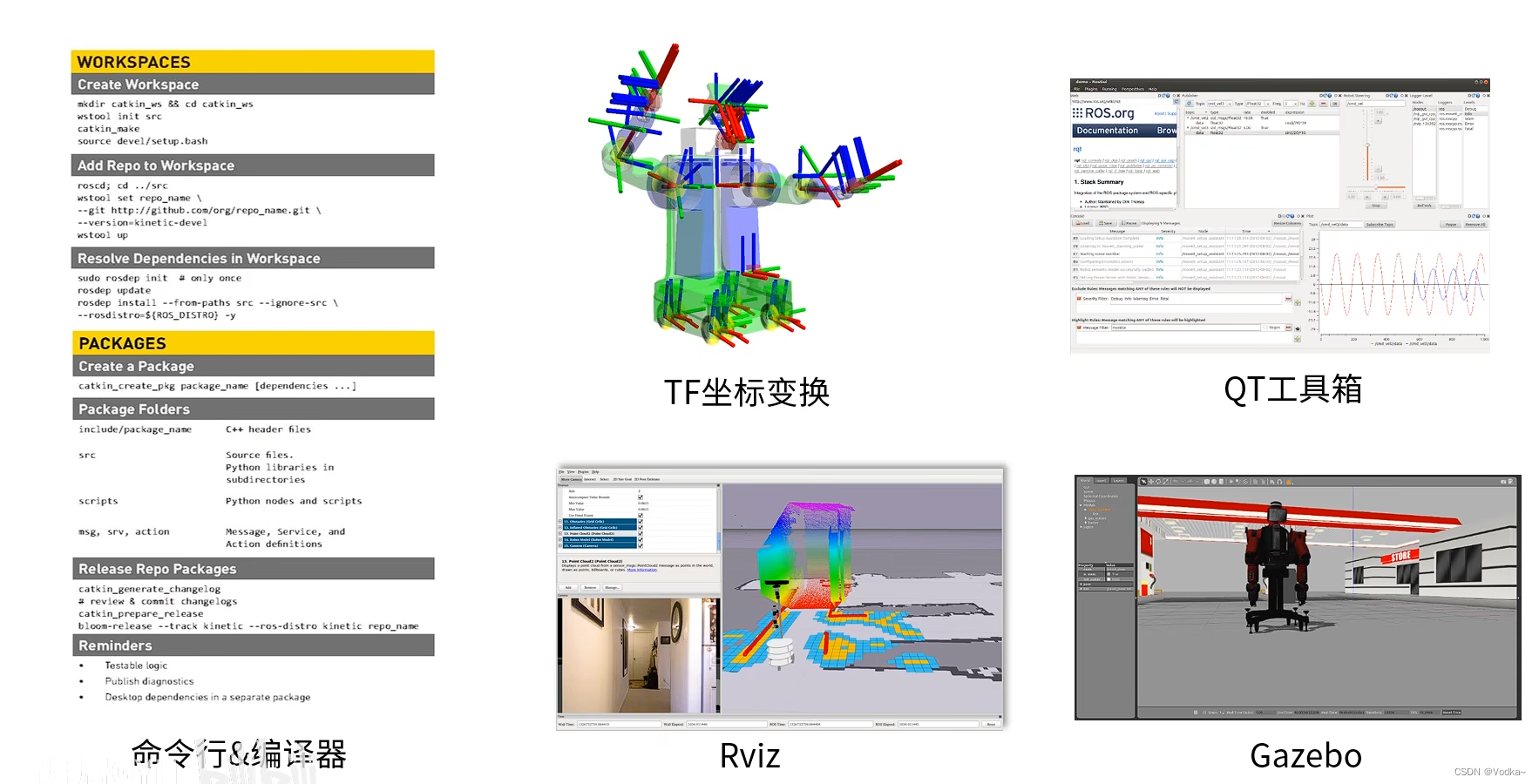
ROS开发工具
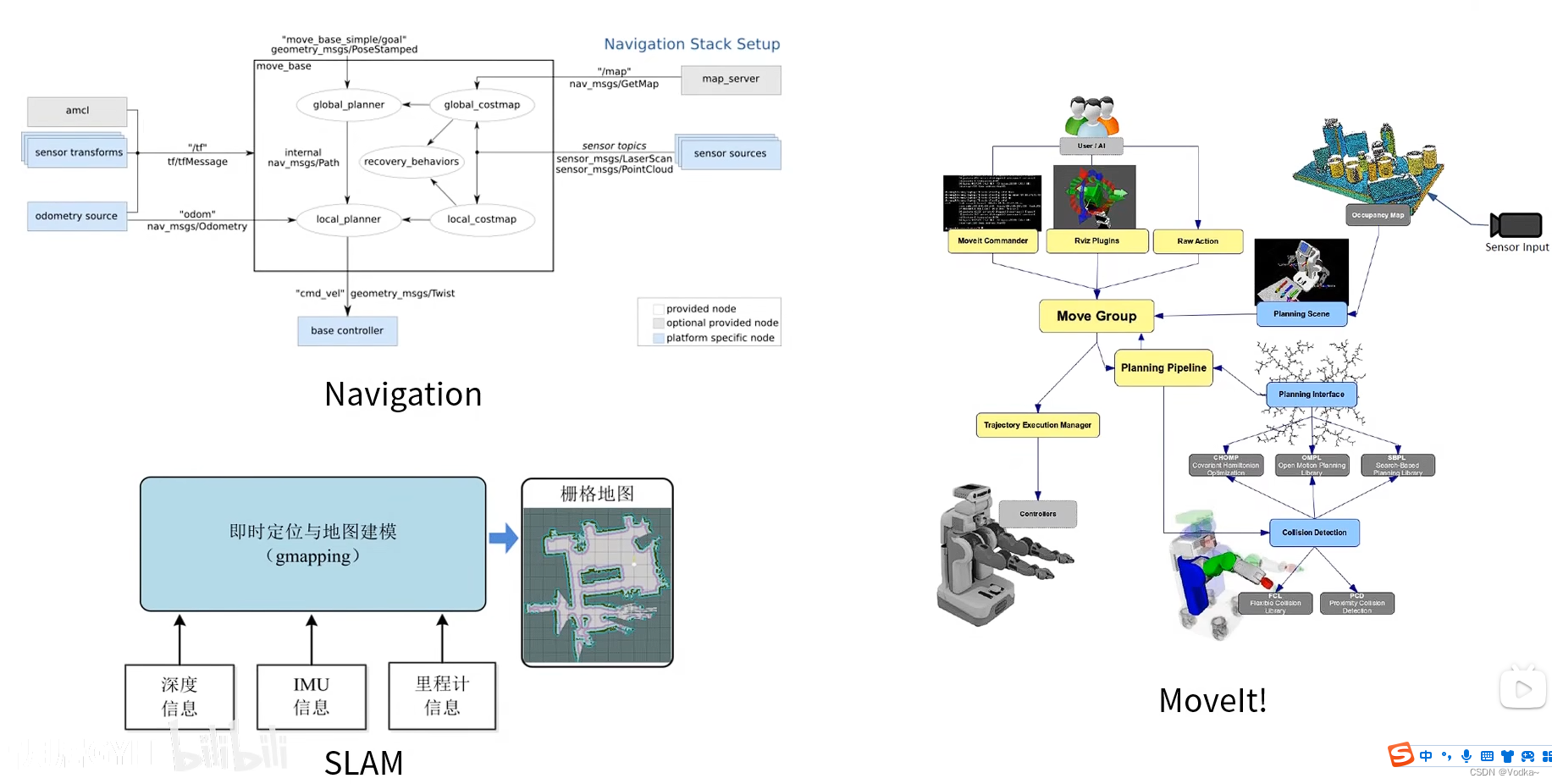
ROS中的应用
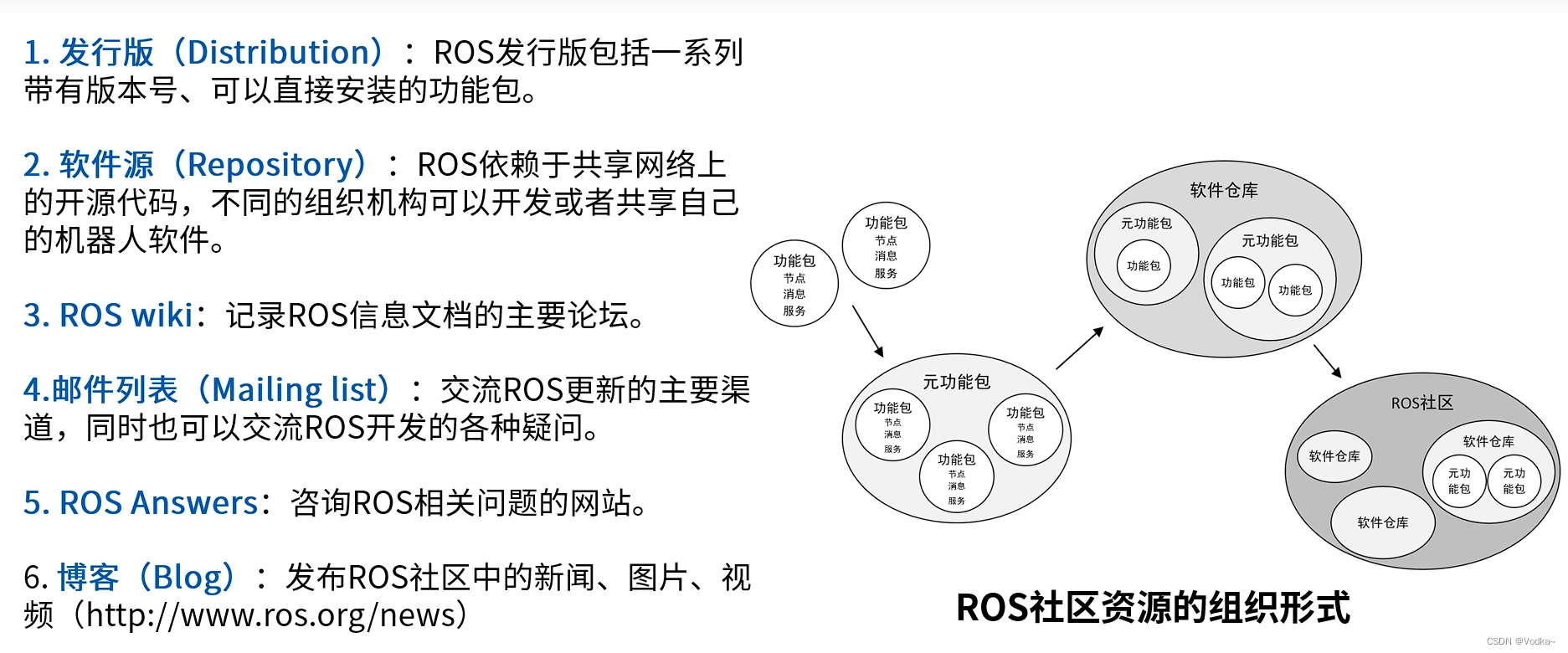
ROS生态

















 6623
6623

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









