






 本文介绍了如何在Python环境下,通过makeMergedMap.py脚本合并多个PCD文件,需要安装open3D0.9.0.0版本并配置conda环境,以及在requirement.txt中查看依赖。操作步骤包括修改PCD文件路径并执行python命令运行脚本。
本文介绍了如何在Python环境下,通过makeMergedMap.py脚本合并多个PCD文件,需要安装open3D0.9.0.0版本并配置conda环境,以及在requirement.txt中查看依赖。操作步骤包括修改PCD文件路径并执行python命令运行脚本。
单个的pcd文件截图
程序链接如下
wanglin/makeMergedMap![]() https://gitee.com/linjiey11/make-merged-map
https://gitee.com/linjiey11/make-merged-map
conda 环境列表如下:
open3d 0.9.0.0
Python 2.7.17
详细在requirement.txt中
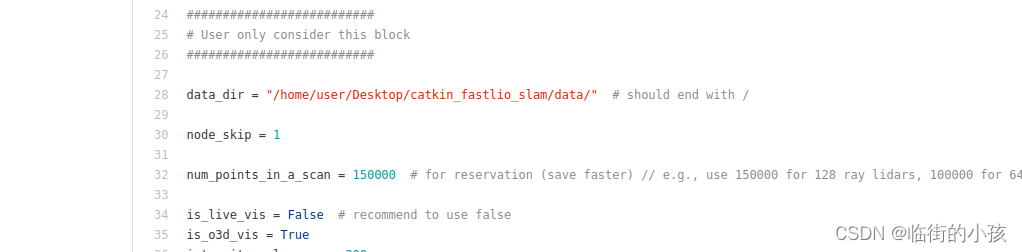
地址配置
在makeMergedMap.py 文件中修改输入的所有的 .pcd文件路径
在代码中,读取每个点云文件对应的位姿数据的部分主要集中在以下几行代码。这些代码从文件 optimized_poses.txt 中读取位姿数据,并将其转换成适合后续处理的矩阵格式。具体的代码段如下:
读取位姿数据的代码段
poses = []
f = open(data_dir + "optimized_poses.txt", 'r')
while True:
line = f.readline()
if not line: break
pose_SE3 = np.asarray([float(i) for i in line.split()])
pose_SE3 = np.vstack((np.reshape(pose_SE3, (3, 4)), np.asarray([0, 0, 0, 1])))
poses.append(pose_SE3)
f.close()
运行代码
python makeMergedMap.py















 1605
1605

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









