






前言:
我们做技术的,不能两耳不问窗外事,一心只读圣贤书,这与闭门造车无异。
看了一篇报道,说BYD目前正在布局智驾平价,基本思路和这几年,BYD在电车平价化的打法和思路一致,就是逐步将电车价格,做到“油电同价”,再做到“电比油低”。
1、目前智驾发展的阶段
从评价标准来看,现在国产化智驾方案,我个人看来,已经无限接近L3,因为法规法律的约束,现在离L3级别的智驾,只差临门一脚。而这些技术,现在统称为NOA技术,NOA全称为Navigate on Autopilot 。
先回头看一看,智驾等级的划分,如下:
Level 0:无自动化。车辆完全由人类驾驶,没有任何自动化辅助系统。
Level 1:辅助驾驶。车辆具备一些基本的辅助驾驶功能,如自动制动、自适应巡航控制等,但仍需要人类驾驶员全程参与驾驶。
Level 2:部分自动驾驶。车辆具备更多的自动驾驶辅助系统,如自动转向、车道保持等,但仍需要人类驾驶员在特定情况下接管驾驶。
Level 3:有条件自动驾驶。车辆具备更高级别的自动驾驶功能,可以在特定道路环境下完成完整的驾驶任务,但仍需要人类驾驶员在通知后接管驾驶。
Level 4:高度自动驾驶。车辆可以在大部分道路环境下实现自动驾驶,包括城市道路和高速公路等,但仍需要人类驾驶员在一些特殊情况下接管驾驶。
2、新的技术NOA
NOA技术从应用场景上,又可以区分为:
1、高速NOA(指高速,城市高架,快速环路等场景下的智能驾驶)
2、通勤NOA(城市NOA的过度技术,只适合固定线路,上下班通勤等)
3、城市NOA (城市全场景,端到端的智能驾驶)
以上3个选项智能化程度,依次上升。驾驶场景复杂度,交通参与单位的密集度。我们依次解析。首先来看复杂度:我们先看最简单的高速NOA
复杂度
1、高速,城市高架,快速环路,首先这些路段道路条件一般都比较好,即道路平整,设计规范(不存在急转弯,大角度爬坡,下坡。不存在道路坑坑洼洼)。
2、其次,以上这些道路,道路标线都是很清晰,设计也比较合理,交通指示标牌(如限速标识牌,违规提示标识牌)都比较完善。
交通参与单位的密集度
3、以上这些道路,交通参与者是“以机动车为主”,不存在行人和非机动车道,
4、高速,高架,城市快速路,基本不存在路口多,也不会存在小动物闯入的情况。
城市NOA (城市全场景,端到端的智能驾驶)
复杂度
1、全场景,意味着会出现小路,窄路,路口多,路况差,交通标识缺少,模糊等现象。
2、最重要的是,全场景意味着,各种非机动车,行人,会出现在交通场景中,各种突发情况出现的概率大大的增加,如非机动车逆行,行人闯红灯,横穿马路等行为。
以上的两点例子说明城市NOA需要处理的情况,比起单纯的高速NOA复杂很多
回到智驾本身,智驾本身可以想象成一个驾驶素质过硬的老司机。智驾本身的机制和人类驾驶一样,交通信息的采集(眼看耳听),汇总(大脑思考),预判(提前采取措施),行动(及时采取措施)。以及外部辅助信息的输入(类似于导航可以提供路况是否拥堵,语音提示测速违停信息等)以及司机自身经验。
3、智能驾驶的核心3大技术包括感知、决策、控制
3.1 感知
感知,目前也主要分为两大技术方案
**1)纯视觉系统,就是单纯依靠摄像头,来感知驾驶环境。特斯拉系列的FSD就是采取这种方案。
**2)视觉系统+雷达(激光雷达或毫米波雷达),来感知环境,国内百度阿波罗团队,蔚小理,以及大疆等智驾驶都是采取这种模式。
3.2决策
目前决策,也存在两种方案:
**1)本地决策,即依靠车身自带的智驾决策模块,通过内置算法来决策(L3及以下的智驾等级,基本都是采取这种算法),也是目前已经量产的智驾车型上比较成熟的方案。
**2)网端+本地,智能网联即将自动驾驶汽车联入到交通网络内,车辆与车辆、车辆与行人、车辆与道路等交通参与者之间可以将出行路径、规划及行驶状态等数据发送到云端,并分享给每一个交通参与者。智能网联的发展可以让自动驾驶汽车获得更多的交通信息,并可以提前对出行状态做出调整,从而确保出行的安全。智能网联更加偏向于整体智能
3.3 控制
即智能系统,对终端决策系统的控制,如刹车执行系统,电机控制系统的控制。通熟的理解,即为控制刹车和油门。
早期的智驾系统确实,只对这些系统作出控制,随着技术发展,包括智能座舱,底盘域的空气弹簧系统,都融入到智驾系统中。
4、智驾的两大目标(我自己总结的)
1、安全
2、快速
5、智驾的四个方向,(电动化、智能化、网联化、共享化)。
5.1 电动化
传统燃油车,尤其是在底盘域和动力域,是存在大量的机械结构和液压结构。
如常见的液压助力刹车系统,假设拥有智驾的车辆,依然采取传统液压刹车系统,至少存在以下几个问题。
1、需要在执行端,增加一个器件,模拟刹车的动作。此器件通过接收智驾模块的命令,决定采取何种动作。
2、响应时间长
3、无法准确快速的获取,刹车系统执行的情况,如刹车片有没有贴紧。
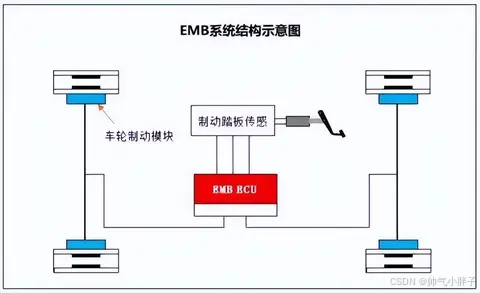
故现在很多车型,智驾车型上采取的都是“线控刹车技术”,传递刹车信号给制动执行单元,控制刹车系统。如下图,舍弃了复杂的液压传动机制
电动化的优势是,信息化程度高,响应快速,是现在的一个主要发展赛道
5.2、智能化
如果把10年前上市的车型中配备的车载大屏,看做是诺基亚,那么目前车载大屏就更类似于智能手机。
以前的车载大屏,黑白屏,只能简单的显示一些天气,速度,导航等信息,智驾车型更注重的是大屏与智驾系统的交互,大屏联网,系统更高级流畅,能刷视频,能打游戏
5.3 网联化
上面说了,智驾系统未来想要达到 L4/L5级别,只依靠本地智驾模块的算力是达不到这样的要求的,必须借助更强大的云端算力系统。这个就可以理解为网联化。
此外网联化,还是将大部分的交通参与者纳入到一个大系统中。也可以看做是共享化

















 733
733

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









