






0 前言
训练测试后,我们会拿到很多评价数据,为了更好地分析数据,分析每类行为的预测结果,我们需要将结果可视化。
需要的评价指标:mAP、每类行为的ap值、每类行为的数量、训练过程的precision、recall、loss值的变化。
GPU平台:https://cloud.videojj.com/auth/register?inviter=18452&activityChannel=student_invite
b站:https://www.bilibili.com/video/BV1dG411t7GR
1 修改object_detection_evaluation.py
对object_detection_evaluation.py文件进行修改
https://github.com/open-mmlab/mmaction2/blob/master/mmaction/core/evaluation/ava_evaluation/object_detection_evaluation.py
主要是将我们所需要的值(mAP、每类行为的ap值、每类行为的数量)存起来
1.1 修改代码
全部代码如下:
# Copyright 2017 The TensorFlow Authors. All Rights Reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
# =============================================================================
"""object_detection_evaluation module.
ObjectDetectionEvaluation is a class which manages ground truth information of
a object detection dataset, and computes frequently used detection metrics such
as Precision, Recall, CorLoc of the provided detection results.
It supports the following operations:
1) Add ground truth information of images sequentially.
2) Add detection result of images sequentially.
3) Evaluate detection metrics on already inserted detection results.
4) Write evaluation result into a pickle file for future processing or
visualization.
Note: This module operates on numpy boxes and box lists.
"""
import collections
import logging
import warnings
from abc import ABCMeta, abstractmethod
from collections import defaultdict
import numpy as np
from . import metrics, per_image_evaluation, standard_fields
class DetectionEvaluator:
"""Interface for object detection evaluation classes.
Example usage of the Evaluator:
------------------------------
evaluator = DetectionEvaluator(categories)
# Detections and groundtruth for image 1.
evaluator.add_single_groundtruth_image_info(...)
evaluator.add_single_detected_image_info(...)
# Detections and groundtruth for image 2.
evaluator.add_single_groundtruth_image_info(...)
evaluator.add_single_detected_image_info(...)
metrics_dict = evaluator.evaluate()
"""
__metaclass__ = ABCMeta
def __init__(self, categories):
"""Constructor.
Args:
categories: A list of dicts, each of which has the following keys -
'id': (required) an integer id uniquely identifying this
category.
'name': (required) string representing category name e.g.,
'cat', 'dog'.
"""
self._categories = categories
@abstractmethod
def add_single_ground_truth_image_info(self, image_id, groundtruth_dict):
"""Adds groundtruth for a single image to be used for evaluation.
Args:
image_id: A unique string/integer identifier for the image.
groundtruth_dict: A dictionary of groundtruth numpy arrays required
for evaluations.
"""
@abstractmethod
def add_single_detected_image_info(self, image_id, detections_dict):
"""Adds detections for a single image to be used for evaluation.
Args:
image_id: A unique string/integer identifier for the image.
detections_dict: A dictionary of detection numpy arrays required
for evaluation.
"""
@abstractmethod
def evaluate(self):
"""Evaluates detections and returns a dictionary of metrics."""
@abstractmethod
def clear(self):
"""Clears the state to prepare for a fresh evaluation."""
class ObjectDetectionEvaluator(DetectionEvaluator):
"""A class to evaluate detections."""
def __init__(self,
categories,
matching_iou_threshold=0.5,
evaluate_corlocs=False,
metric_prefix=None,
use_weighted_mean_ap=False,
evaluate_masks=False):
"""Constructor.
Args:
categories: A list of dicts, each of which has the following keys -
'id': (required) an integer id uniquely identifying this
category.
'name': (required) string representing category name e.g.,
'cat', 'dog'.
matching_iou_threshold: IOU threshold to use for matching
groundtruth boxes to detection boxes.
evaluate_corlocs: (optional) boolean which determines if corloc
scores are to be returned or not.
metric_prefix: (optional) string prefix for metric name; if None,
no prefix is used.
use_weighted_mean_ap: (optional) boolean which determines if the
mean average precision is computed directly from the scores and
tp_fp_labels of all classes.
evaluate_masks: If False, evaluation will be performed based on
boxes. If True, mask evaluation will be performed instead.
Raises:
ValueError: If the category ids are not 1-indexed.
"""
super(ObjectDetectionEvaluator, self).__init__(categories)
self._num_classes = max([cat['id'] for cat in categories])
if min(cat['id'] for cat in categories) < 1:
raise ValueError('Classes should be 1-indexed.')
self._matching_iou_threshold = matching_iou_threshold
self._use_weighted_mean_ap = use_weighted_mean_ap
self._label_id_offset = 1
self._evaluate_masks = evaluate_masks
self._evaluation = ObjectDetectionEvaluation(
num_groundtruth_classes=self._num_classes,
matching_iou_threshold=self._matching_iou_threshold,
use_weighted_mean_ap=self._use_weighted_mean_ap,
label_id_offset=self._label_id_offset,
)
self._image_ids = set([])
self._evaluate_corlocs = evaluate_corlocs
self._metric_prefix = (metric_prefix + '_') if metric_prefix else ''
def add_single_ground_truth_image_info(self, image_id, groundtruth_dict):
"""Adds groundtruth for a single image to be used for evaluation.
Args:
image_id: A unique string/integer identifier for the image.
groundtruth_dict: A dictionary containing -
standard_fields.InputDataFields.groundtruth_boxes: float32
numpy array of shape [num_boxes, 4] containing `num_boxes`
groundtruth boxes of the format [ymin, xmin, ymax, xmax] in
absolute image coordinates.
standard_fields.InputDataFields.groundtruth_classes: integer
numpy array of shape [num_boxes] containing 1-indexed
groundtruth classes for the boxes.
standard_fields.InputDataFields.groundtruth_instance_masks:
Optional numpy array of shape [num_boxes, height, width]
with values in {0, 1}.
Raises:
ValueError: On adding groundtruth for an image more than once. Will
also raise error if instance masks are not in groundtruth
dictionary.
"""
if image_id in self._image_ids:
raise ValueError(
'Image with id {} already added.'.format(image_id))
groundtruth_classes = (
groundtruth_dict[
standard_fields.InputDataFields.groundtruth_classes] -
self._label_id_offset)
groundtruth_masks = None
if self._evaluate_masks:
if (standard_fields.InputDataFields.groundtruth_instance_masks
not in groundtruth_dict):
raise ValueError(
'Instance masks not in groundtruth dictionary.')
groundtruth_masks = groundtruth_dict[
standard_fields.InputDataFields.groundtruth_instance_masks]
self._evaluation.add_single_ground_truth_image_info(
image_key=image_id,
groundtruth_boxes=groundtruth_dict[
standard_fields.InputDataFields.groundtruth_boxes],
groundtruth_class_labels=groundtruth_classes,
groundtruth_masks=groundtruth_masks,
)
self._image_ids.update([image_id])
def add_single_detected_image_info(self, image_id, detections_dict):
"""Adds detections for a single image to be used for evaluation.
Args:
image_id: A unique string/integer identifier for the image.
detections_dict: A dictionary containing -
standard_fields.DetectionResultFields.detection_boxes: float32
numpy array of shape [num_boxes, 4] containing `num_boxes`
detection boxes of the format [ymin, xmin, ymax, xmax] in
absolute image coordinates.
standard_fields.DetectionResultFields.detection_scores: float32
numpy array of shape [num_boxes] containing detection
scores for the boxes.
standard_fields.DetectionResultFields.detection_classes:
integer numpy array of shape [num_boxes] containing
1-indexed detection classes for the boxes.
standard_fields.DetectionResultFields.detection_masks: uint8
numpy array of shape [num_boxes, height, width] containing
`num_boxes` masks of values ranging between 0 and 1.
Raises:
ValueError: If detection masks are not in detections dictionary.
"""
detection_classes = (
detections_dict[
standard_fields.DetectionResultFields.detection_classes] -
self._label_id_offset)
detection_masks = None
if self._evaluate_masks:
if (standard_fields.DetectionResultFields.detection_masks
not in detections_dict):
raise ValueError(
'Detection masks not in detections dictionary.')
detection_masks = detections_dict[
standard_fields.DetectionResultFields.detection_masks]
self._evaluation.add_single_detected_image_info(
image_key=image_id,
detected_boxes=detections_dict[
standard_fields.DetectionResultFields.detection_boxes],
detected_scores=detections_dict[
standard_fields.DetectionResultFields.detection_scores],
detected_class_labels=detection_classes,
detected_masks=detection_masks,
)
@staticmethod
def create_category_index(categories):
"""Creates dictionary of COCO compatible categories keyed by category
id.
Args:
categories: a list of dicts, each of which has the following keys:
'id': (required) an integer id uniquely identifying this
category.
'name': (required) string representing category name
e.g., 'cat', 'dog', 'pizza'.
Returns:
category_index: a dict containing the same entries as categories,
but keyed by the 'id' field of each category.
"""
category_index = {}
for cat in categories:
category_index[cat['id']] = cat
return category_index
def evaluate(self):
"""Compute evaluation result.
Returns:
A dictionary of metrics with the following fields -
1. summary_metrics:
'Precision/mAP@<matching_iou_threshold>IOU': mean average
precision at the specified IOU threshold
2. per_category_ap: category specific results with keys of the form
'PerformanceByCategory/mAP@<matching_iou_threshold>IOU/category'
"""
(per_class_ap, mean_ap, _, _, per_class_corloc,
mean_corloc) = self._evaluation.evaluate()
metric = f'mAP@{self._matching_iou_threshold}IOU'
pascal_metrics = {self._metric_prefix + metric: mean_ap}
if self._evaluate_corlocs:
pascal_metrics[self._metric_prefix +
'Precision/meanCorLoc@{}IOU'.format(
self._matching_iou_threshold)] = mean_corloc
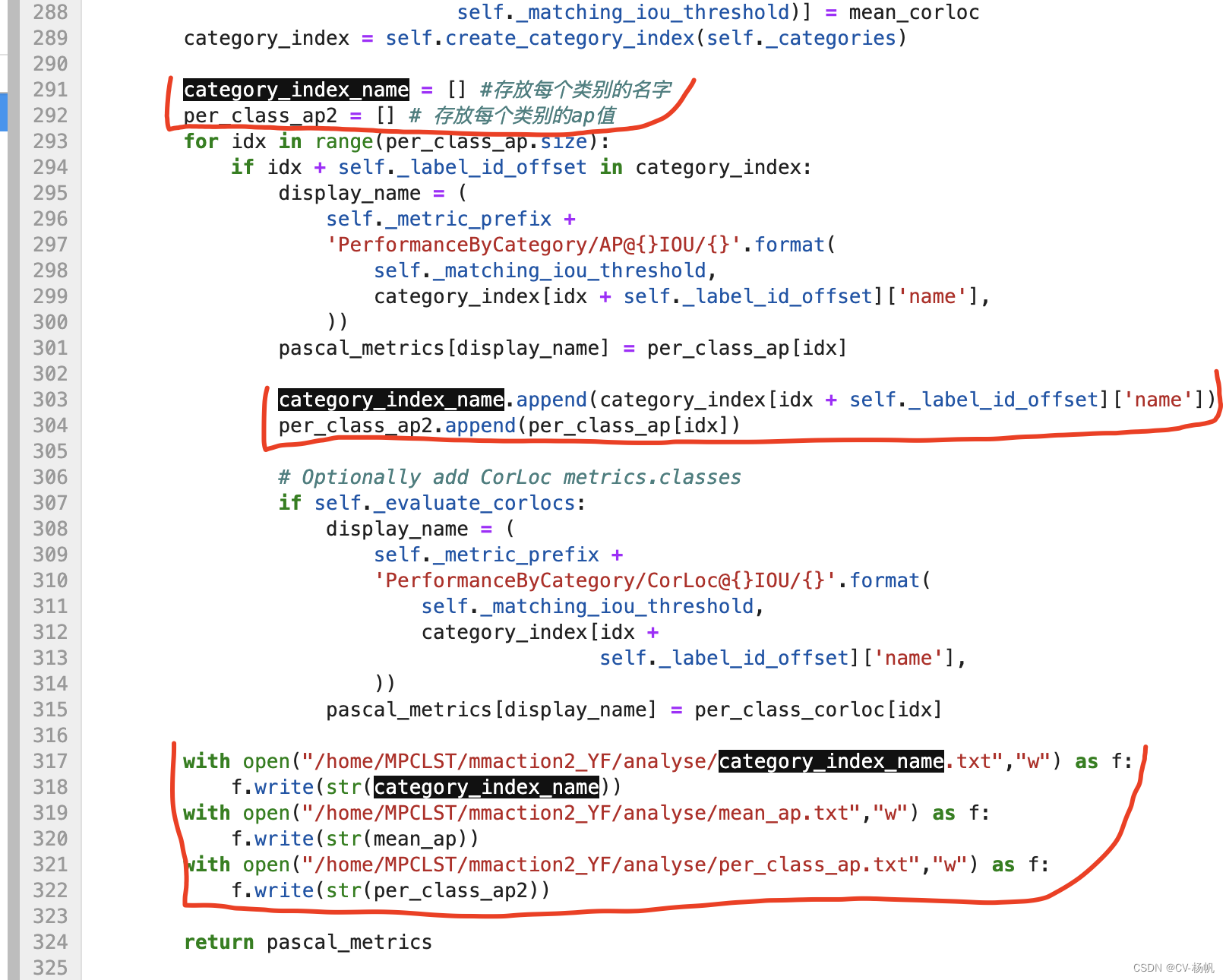
category_index = self.create_category_index(self._categories)
category_index_name = [] #存放每个类别的名字
per_class_ap2 = [] # 存放每个类别的ap值
for idx in range(per_class_ap.size):
if idx + self._label_id_offset in category_index:
display_name = (
self._metric_prefix +
'PerformanceByCategory/AP@{}IOU/{}'.format(
self._matching_iou_threshold,
category_index[idx + self._label_id_offset]['name'],
))
pascal_metrics[display_name] = per_class_ap[idx]
category_index_name.append(category_index[idx + self._label_id_offset]['name'])
per_class_ap2.append(per_class_ap[idx])
# Optionally add CorLoc metrics.classes
if self._evaluate_corlocs:
display_name = (
self._metric_prefix +
'PerformanceByCategory/CorLoc@{}IOU/{}'.format(
self._matching_iou_threshold,
category_index[idx +
self._label_id_offset]['name'],
))
pascal_metrics[display_name] = per_class_corloc[idx]
with open("/home/MPCLST/mmaction2_YF/analyse/category_index_name.txt","w") as f:
f.write(str(category_index_name))
with open("/home/MPCLST/mmaction2_YF/analyse/mean_ap.txt","w") as f:
f.write(str(mean_ap))
with open("/home/MPCLST/mmaction2_YF/analyse/per_class_ap.txt","w") as f:
f.write(str(per_class_ap2))
return pascal_metrics
def clear(self):
"""Clears the state to prepare for a fresh evaluation."""
self._evaluation = ObjectDetectionEvaluation(
num_groundtruth_classes=self._num_classes,
matching_iou_threshold=self._matching_iou_threshold,
use_weighted_mean_ap=self._use_weighted_mean_ap,
label_id_offset=self._label_id_offset,
)
self._image_ids.clear()
class PascalDetectionEvaluator(ObjectDetectionEvaluator):
"""A class to evaluate detections using PASCAL metrics."""
def __init__(self, categories, matching_iou_threshold=0.5):
super(PascalDetectionEvaluator, self).__init__(
categories,
matching_iou_threshold=matching_iou_threshold,
evaluate_corlocs=False,
use_weighted_mean_ap=False,
)
ObjectDetectionEvalMetrics = collections.namedtuple(
'ObjectDetectionEvalMetrics',
[
'average_precisions',
'mean_ap',
'precisions',
'recalls',
'corlocs',
'mean_corloc',
],
)
class ObjectDetectionEvaluation:
"""Internal implementation of Pascal object detection metrics."""
def __init__(self,
num_groundtruth_classes,
matching_iou_threshold=0.5,
nms_iou_threshold=1.0,
nms_max_output_boxes=10000,
use_weighted_mean_ap=False,
label_id_offset=0):
if num_groundtruth_classes < 1:
raise ValueError(
'Need at least 1 groundtruth class for evaluation.')
self.per_image_eval = per_image_evaluation.PerImageEvaluation(
num_groundtruth_classes=num_groundtruth_classes,
matching_iou_threshold=matching_iou_threshold,
)
self.num_class = num_groundtruth_classes
self.use_weighted_mean_ap = use_weighted_mean_ap
self.label_id_offset = label_id_offset
self.groundtruth_boxes = {}
self.groundtruth_class_labels = {}
self.groundtruth_masks = {}
self.num_gt_instances_per_class = np.zeros(self.num_class, dtype=int)
self.num_gt_imgs_per_class = np.zeros(self.num_class, dtype=int)
self._initialize_detections()
def _initialize_detections(self):
self.detection_keys = set()
self.scores_per_class = [[] for _ in range(self.num_class)]
self.tp_fp_labels_per_class = [[] for _ in range(self.num_class)]
self.num_images_correctly_detected_per_class = np.zeros(self.num_class)
self.average_precision_per_class = np.empty(
self.num_class, dtype=float)
self.average_precision_per_class.fill(np.nan)
self.precisions_per_class = []
self.recalls_per_class = []
self.corloc_per_class = np.ones(self.num_class, dtype=float)
def clear_detections(self):
self._initialize_detections()
def add_single_ground_truth_image_info(self,
image_key,
groundtruth_boxes,
groundtruth_class_labels,
groundtruth_masks=None):
"""Adds groundtruth for a single image to be used for evaluation.
Args:
image_key: A unique string/integer identifier for the image.
groundtruth_boxes: float32 numpy array of shape [num_boxes, 4]
containing `num_boxes` groundtruth boxes of the format
[ymin, xmin, ymax, xmax] in absolute image coordinates.
groundtruth_class_labels: integer numpy array of shape [num_boxes]
containing 0-indexed groundtruth classes for the boxes.
groundtruth_masks: uint8 numpy array of shape
[num_boxes, height, width] containing `num_boxes` groundtruth
masks. The mask values range from 0 to 1.
"""
if image_key in self.groundtruth_boxes:
warnings.warn(('image %s has already been added to the ground '
'truth database.'), image_key)
return
self.groundtruth_boxes[image_key] = groundtruth_boxes
self.groundtruth_class_labels[image_key] = groundtruth_class_labels
self.groundtruth_masks[image_key] = groundtruth_masks
self._update_ground_truth_statistics(groundtruth_class_labels)
def add_single_detected_image_info(self,
image_key,
detected_boxes,
detected_scores,
detected_class_labels,
detected_masks=None):
"""Adds detections for a single image to be used for evaluation.
Args:
image_key: A unique string/integer identifier for the image.
detected_boxes: float32 numpy array of shape [num_boxes, 4]
containing `num_boxes` detection boxes of the format
[ymin, xmin, ymax, xmax] in absolute image coordinates.
detected_scores: float32 numpy array of shape [num_boxes]
containing detection scores for the boxes.
detected_class_labels: integer numpy array of shape [num_boxes]
containing 0-indexed detection classes for the boxes.
detected_masks: np.uint8 numpy array of shape
[num_boxes, height, width] containing `num_boxes` detection
masks with values ranging between 0 and 1.
Raises:
ValueError: if the number of boxes, scores and class labels differ
in length.
"""
if len(detected_boxes) != len(detected_scores) or len(
detected_boxes) != len(detected_class_labels):
raise ValueError(
'detected_boxes, detected_scores and '
'detected_class_labels should all have same lengths. Got'
'[%d, %d, %d]' % len(detected_boxes),
len(detected_scores),
len(detected_class_labels),
)
if image_key in self.detection_keys:
warnings.warn(('image %s has already been added to the ground '
'truth database.'), image_key)
return
self.detection_keys.add(image_key)
if image_key in self.groundtruth_boxes:
groundtruth_boxes = self.groundtruth_boxes[image_key]
groundtruth_class_labels = self.groundtruth_class_labels[image_key]
# Masks are popped instead of look up. The reason is that we do not
# want to keep all masks in memory which can cause memory overflow.
groundtruth_masks = self.groundtruth_masks.pop(image_key)
else:
groundtruth_boxes = np.empty(shape=[0, 4], dtype=float)
groundtruth_class_labels = np.array([], dtype=int)
if detected_masks is None:
groundtruth_masks = None
else:
groundtruth_masks = np.empty(shape=[0, 1, 1], dtype=float)
(
scores,
tp_fp_labels,
) = self.per_image_eval.compute_object_detection_metrics(
detected_boxes=detected_boxes,
detected_scores=detected_scores,
detected_class_labels=detected_class_labels,
groundtruth_boxes=groundtruth_boxes,
groundtruth_class_labels=groundtruth_class_labels,
detected_masks=detected_masks,
groundtruth_masks=groundtruth_masks,
)
for i in range(self.num_class):
if scores[i].shape[0] > 0:
self.scores_per_class[i].append(scores[i])
self.tp_fp_labels_per_class[i].append(tp_fp_labels[i])
def _update_ground_truth_statistics(self, groundtruth_class_labels):
"""Update grouth truth statitistics.
Args:
groundtruth_class_labels: An integer numpy array of length M,
representing M class labels of object instances in ground truth
"""
count = defaultdict(lambda: 0)
for label in groundtruth_class_labels:
count[label] += 1
for k in count:
self.num_gt_instances_per_class[k] += count[k]
self.num_gt_imgs_per_class[k] += 1
def evaluate(self):
"""Compute evaluation result.
Returns:
A named tuple with the following fields -
average_precision: float numpy array of average precision for
each class.
mean_ap: mean average precision of all classes, float scalar
precisions: List of precisions, each precision is a float numpy
array
recalls: List of recalls, each recall is a float numpy array
corloc: numpy float array
mean_corloc: Mean CorLoc score for each class, float scalar
"""
if (self.num_gt_instances_per_class == 0).any():
logging.info(
'The following classes have no ground truth examples: %s',
np.squeeze(np.argwhere(self.num_gt_instances_per_class == 0)) +
self.label_id_offset)
if self.use_weighted_mean_ap:
all_scores = np.array([], dtype=float)
all_tp_fp_labels = np.array([], dtype=bool)
for class_index in range(self.num_class):
if self.num_gt_instances_per_class[class_index] == 0:
continue
if not self.scores_per_class[class_index]:
scores = np.array([], dtype=float)
tp_fp_labels = np.array([], dtype=bool)
else:
scores = np.concatenate(self.scores_per_class[class_index])
tp_fp_labels = np.concatenate(
self.tp_fp_labels_per_class[class_index])
if self.use_weighted_mean_ap:
all_scores = np.append(all_scores, scores)
all_tp_fp_labels = np.append(all_tp_fp_labels, tp_fp_labels)
precision, recall = metrics.compute_precision_recall(
scores, tp_fp_labels,
self.num_gt_instances_per_class[class_index])
self.precisions_per_class.append(precision)
self.recalls_per_class.append(recall)
average_precision = metrics.compute_average_precision(
precision, recall)
self.average_precision_per_class[class_index] = average_precision
self.corloc_per_class = metrics.compute_cor_loc(
self.num_gt_imgs_per_class,
self.num_images_correctly_detected_per_class)
if self.use_weighted_mean_ap:
num_gt_instances = np.sum(self.num_gt_instances_per_class)
precision, recall = metrics.compute_precision_recall(
all_scores, all_tp_fp_labels, num_gt_instances)
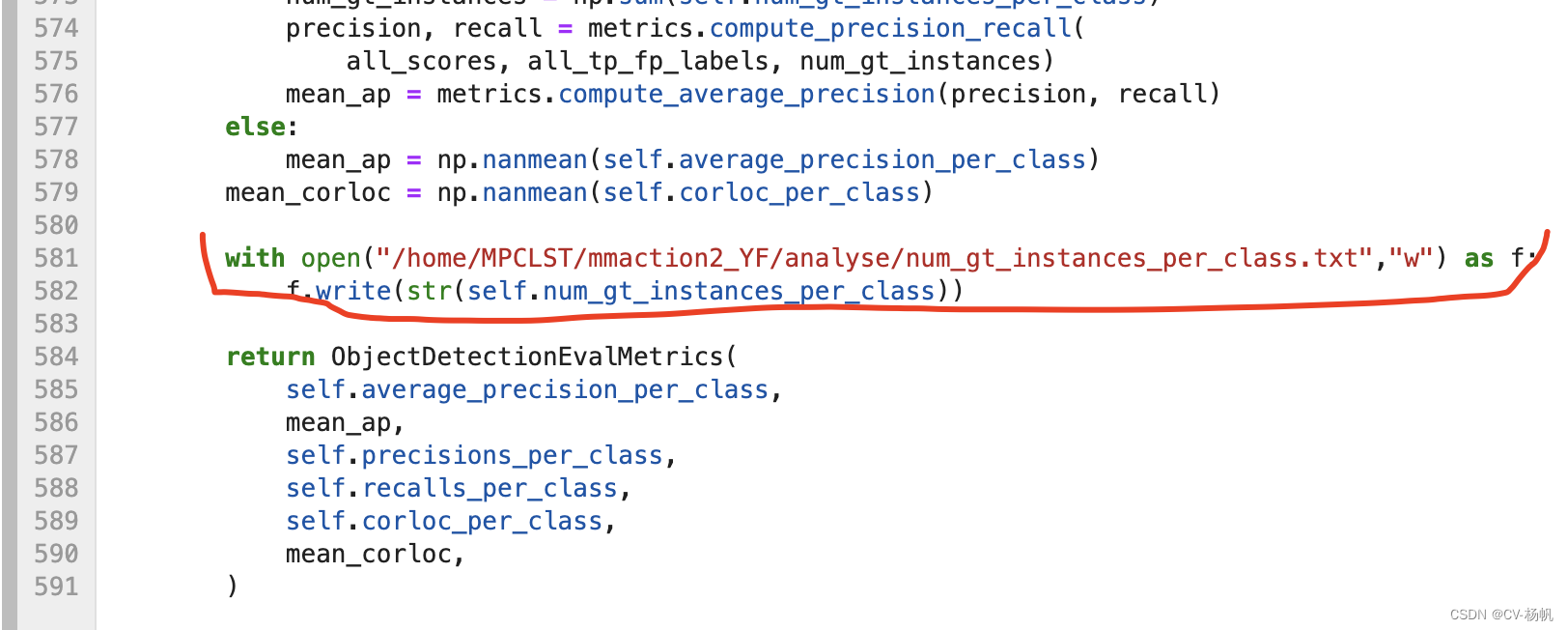
mean_ap = metrics.compute_average_precision(precision, recall)
else:
mean_ap = np.nanmean(self.average_precision_per_class)
mean_corloc = np.nanmean(self.corloc_per_class)
with open("/home/MPCLST/mmaction2_YF/analyse/num_gt_instances_per_class.txt","w") as f:
f.write(str(self.num_gt_instances_per_class))
return ObjectDetectionEvalMetrics(
self.average_precision_per_class,
mean_ap,
self.precisions_per_class,
self.recalls_per_class,
self.corloc_per_class,
mean_corloc,
)
1.2 运行
运行测试代码:
# 测试集的分析-latest
cd /home/MPCLST/mmaction2_YF/
python tools/test.py configs/detection/ava/my_custom_slowfast_kinetics_pretrained_r50_4x16x1_20e_ava.py ./work_dirs/22-8-15-custom-ava/slowfast_kinetics_pretrained_r50_4x16x1_20e_ava_rgb/latest.pth --eval mAP
1.3 结果
运行结束后,就有这些文件:
category_index_name.txt:
[‘open eyes’, ‘close mouth’, ‘body sit’, ‘body side Sit’, ‘body
stand’, ‘left hand palm grip’, ‘left hand palm spread’, ‘left arm
flat’, ‘left arm flexion’, ‘left arm raised’, 'left handed behavior
object book ', ‘left handed behavior object no interaction’, ‘right
hand palm grip’, ‘right hand palm spread’, ‘right hand write’, ‘right
arm flat’, ‘right arm flexion’, ‘right arm raised’, 'right handed
behavior object book ', ‘right handed behavior object exercise book’,
‘leg stand’]
mean_ap.txt:
0.11240757978259343
num_gt_instances_per_class.txt:
[ 0 0 177 0 0 0 0 113 0 0 649 31 57 0 0 0 0
0 0 0 0 158 89 0 0 0 0 0 163 0 0 197 101 0 0
12 0 0 0 0 0 142 0 0 102 46 0 0 88 0 0 111
0 0 260 22 0 0 87 41 0 0 0 0 0 0 48]
per_class_ap.txt:
[0.1421482259220372, 0.10274944268053773, 0.13532689302740486,
0.09574401664932364, 0.40350877192982454, 0.12036817004822832, 0.029962546816479398, 0.05767203366563195, 0.13243738037779812, 0.010289264220539702, 0.0, 0.09523227917512644, 0.19255575748085793, 0.026529108327192335, 0.09929630924164146, 0.06424232886028308, 0.17735042735042733, 0.0004887585532746823, 0.09102706711160549, 0.008630393996247656, 0.37499999999999994]
2 analyse.py
然后执行analyse.py(需要自己创建,代码如下),其位于:/home/MPCLST/mmaction2_YF/analyse
2.1 代码
代码如下:
with open("mean_ap.txt", "r", encoding='utf-8') as f: #打开文本
mean_ap = f.read() #读取文本
with open("category_index_name.txt", "r", encoding='utf-8') as f: #打开文本
data = f.read() #读取文本
data = data.replace('[', '') #去掉[
data = data.replace(']', '') #去掉]
data = data.replace('\'', '') #去掉'
data = data.replace(', ', ',') #去掉,后面的空格
data = data.replace(' ', '_') #将所有空格替换为_,如open eyes变成open_eyes
category_index_name = data.split(',') # 以,分割
with open("num_gt_instances_per_class.txt", "r", encoding='utf-8') as f: #打开文本
data = f.read() #读取文本
data = data.replace('[', '') #去掉[
data = data.replace(']', '') #去掉]
data = data.replace('\n', '') #去掉回车
num_gt_instances_per_class = data.split() #采用默认方式分割
with open("per_class_ap.txt", "r", encoding='utf-8') as f: #打开文本
data = f.read() #读取文本
data = data.replace('[', '') #去掉[
data = data.replace(']', '') #去掉]
data = data.replace('\n', '') #去掉回车
per_class_ap = data.split() #采用默认方式分割
line1 = '类别 '
for i,e in enumerate(category_index_name):
line1 = line1 + e + ' '
line2 = '类别数量 '
zero_arr = [] #存放不应该有的类别的编号(如果训练时,自定义了类别,zero_arr就会存入没有选中的类别的编号)
for i,e in enumerate(num_gt_instances_per_class):
#去掉不应该有的类别(如果训练时,自定义了类别,就会进入下面的if)
if len(category_index_name) != len(num_gt_instances_per_class):
if e == '0': # 没有选中的类别的数量为0
zero_arr.append(i)
continue
line2 = line2 + e + ' '
line3 = 'max(类别数量) '
num_gt_instances_per_class2 = list(map(int, num_gt_instances_per_class))
line3 = line3 + str(max(num_gt_instances_per_class2))
line4 = 'ap值, '
for i,e in enumerate(per_class_ap):
line4 = line4 + e + ' '
line5 = '类别数量比max(类别数量) '
for i,e in enumerate(num_gt_instances_per_class2):
if i in zero_arr:
continue
line5 = line5 + str(e/max(num_gt_instances_per_class2)) + ' '
all = line1 + '\n' + line2 + '\n' + line3 + '\n\n' + line1 + '\n' + line4 + '\n\n' + line1 + '\n' + line5 + '\n' + line4
with open("all.txt","w") as f:
f.write(all)
2.2 运行
执行:
cd /home/MPCLST/mmaction2_YF/analyse
python analyse.py
2.3 结果
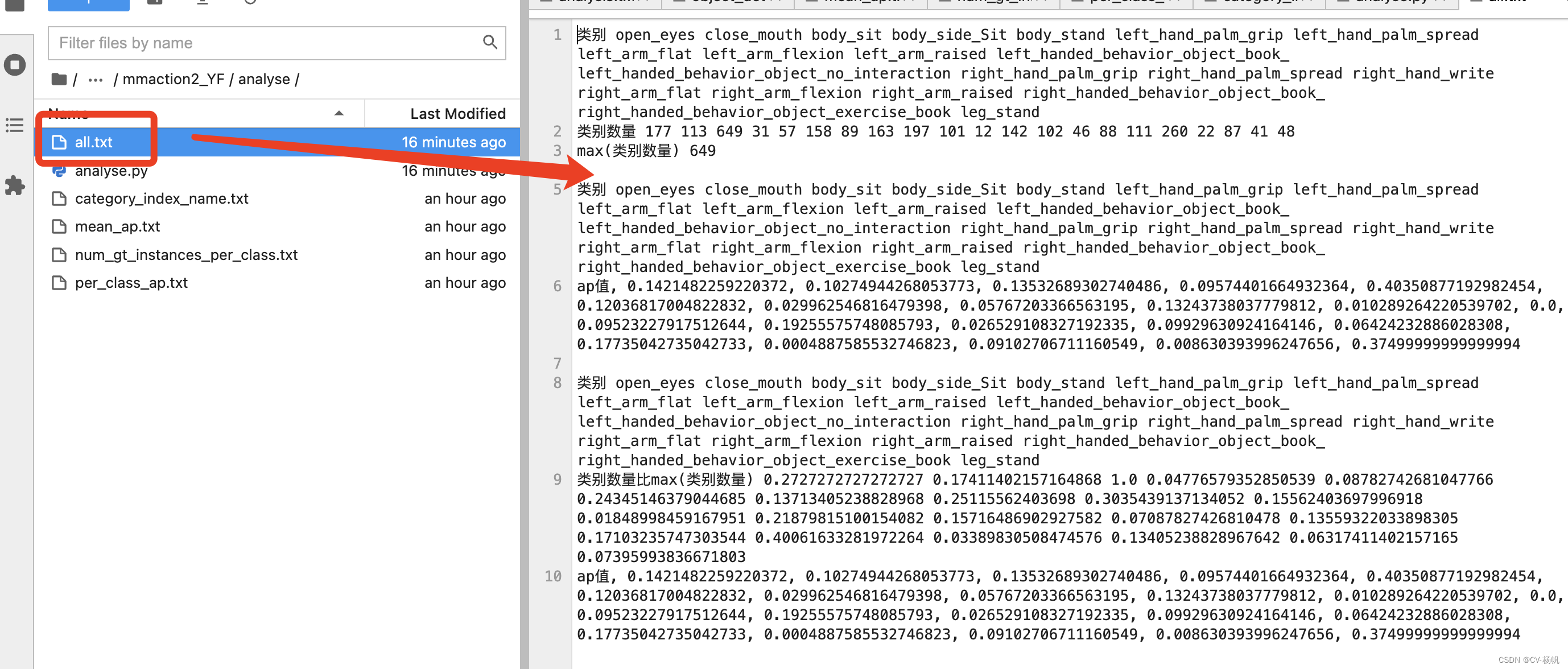
all.txt:
类别 open_eyes close_mouth body_sit body_side_Sit body_stand
left_hand_palm_grip left_hand_palm_spread left_arm_flat
left_arm_flexion left_arm_raised left_handed_behavior_object_book_
left_handed_behavior_object_no_interaction right_hand_palm_grip
right_hand_palm_spread right_hand_write right_arm_flat
right_arm_flexion right_arm_raised right_handed_behavior_object_book_
right_handed_behavior_object_exercise_book leg_stand 类别数量 177 113 649
31 57 158 89 163 197 101 12 142 102 46 88 111 260 22 87 41 48
max(类别数量) 649类别 open_eyes close_mouth body_sit body_side_Sit body_stand
left_hand_palm_grip left_hand_palm_spread left_arm_flat
left_arm_flexion left_arm_raised left_handed_behavior_object_book_
left_handed_behavior_object_no_interaction right_hand_palm_grip
right_hand_palm_spread right_hand_write right_arm_flat
right_arm_flexion right_arm_raised right_handed_behavior_object_book_
right_handed_behavior_object_exercise_book leg_stand ap值,
0.1421482259220372, 0.10274944268053773, 0.13532689302740486, 0.09574401664932364, 0.40350877192982454, 0.12036817004822832, 0.029962546816479398, 0.05767203366563195, 0.13243738037779812, 0.010289264220539702, 0.0, 0.09523227917512644, 0.19255575748085793, 0.026529108327192335, 0.09929630924164146, 0.06424232886028308, 0.17735042735042733, 0.0004887585532746823, 0.09102706711160549, 0.008630393996247656, 0.37499999999999994类别 open_eyes close_mouth body_sit body_side_Sit body_stand
left_hand_palm_grip left_hand_palm_spread left_arm_flat
left_arm_flexion left_arm_raised left_handed_behavior_object_book_
left_handed_behavior_object_no_interaction right_hand_palm_grip
right_hand_palm_spread right_hand_write right_arm_flat
right_arm_flexion right_arm_raised right_handed_behavior_object_book_
right_handed_behavior_object_exercise_book leg_stand 类别数量比max(类别数量)
0.2727272727272727 0.17411402157164868 1.0 0.04776579352850539 0.08782742681047766 0.24345146379044685 0.13713405238828968 0.25115562403698 0.3035439137134052 0.15562403697996918 0.01848998459167951 0.21879815100154082 0.15716486902927582 0.07087827426810478 0.13559322033898305 0.17103235747303544 0.40061633281972264 0.03389830508474576 0.13405238828967642 0.06317411402157165 0.07395993836671803 ap值, 0.1421482259220372, 0.10274944268053773, 0.13532689302740486, 0.09574401664932364, 0.40350877192982454, 0.12036817004822832, 0.029962546816479398, 0.05767203366563195, 0.13243738037779812, 0.010289264220539702, 0.0, 0.09523227917512644, 0.19255575748085793, 0.026529108327192335, 0.09929630924164146, 0.06424232886028308, 0.17735042735042733, 0.0004887585532746823, 0.09102706711160549, 0.008630393996247656, 0.37499999999999994
3 可视化
然后将all.txt的东西复制到腾讯文档的excel当中,采用智能分列,做成如下:
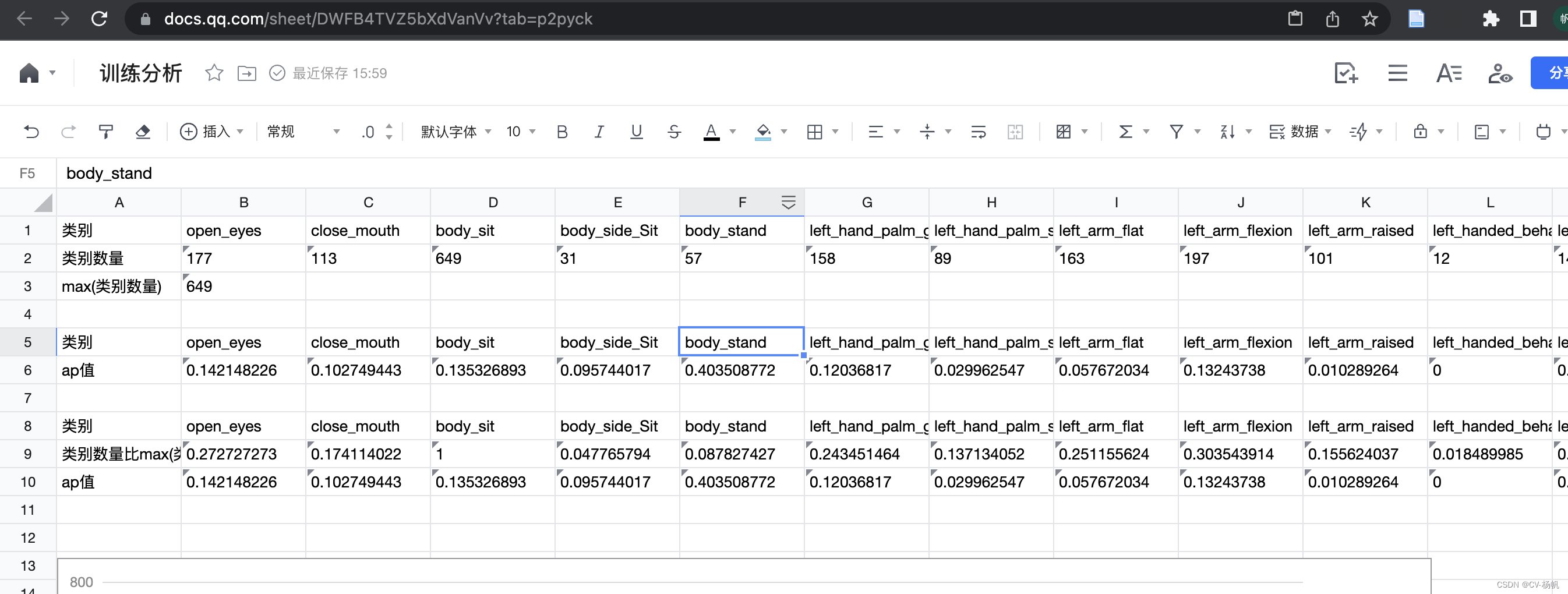
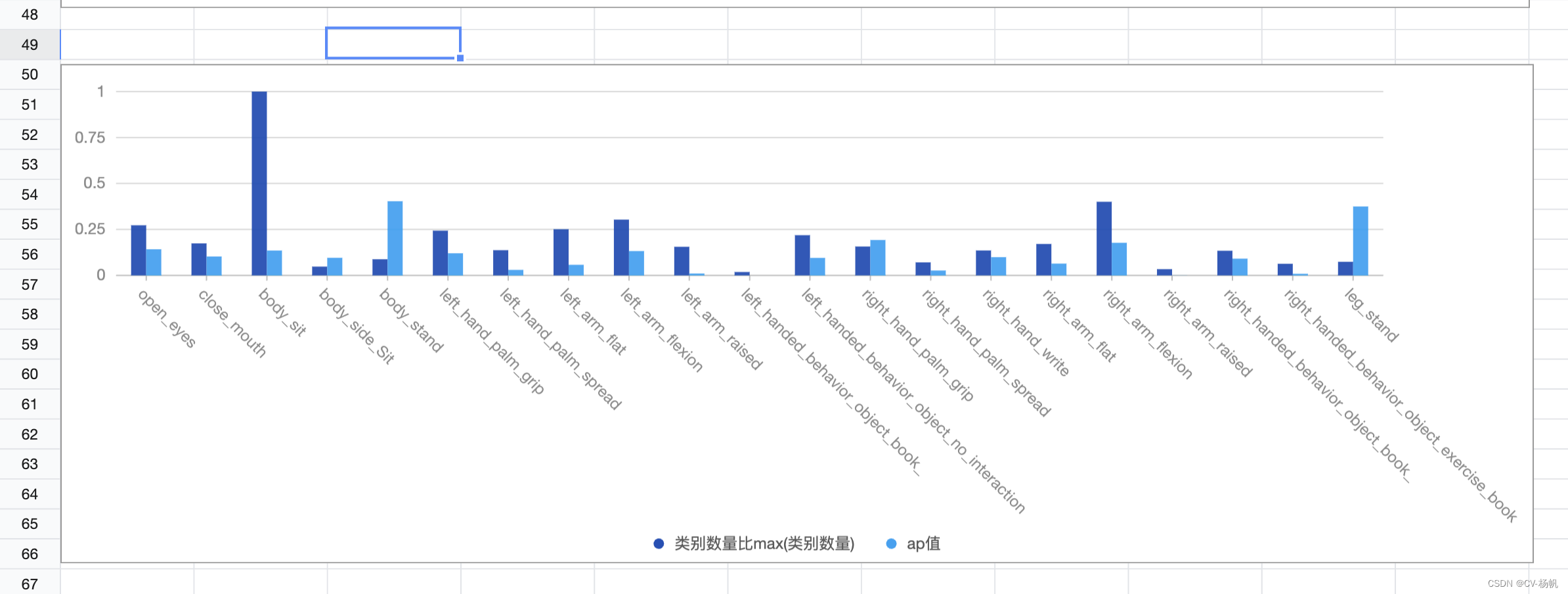
然后再做成图表















 1361
1361











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









