






conda create -n rlbench_act python=3.8.10
conda activate rlbench_actRLBench的安装参考我的这篇文章
接下来全部都照做就可以
git clone https://github.com/Boxjod/RLBench_ACT.git
cd RLBench_ACT
conda activate rlbench_act
pip3 install -r requirements.txt
pip3 install -e ./PyRep
pip3 install -e ./RLBench
pip3 install -e ./act/detr
conda install pytorch==2.1.2 torchvision==0.16.2 torchaudio==2.1.2 pytorch-cuda=12.1 -c pytorch -c nvidia
在后面运行这段代码从 RLBench 获取机器人任务演示的时候发现报错
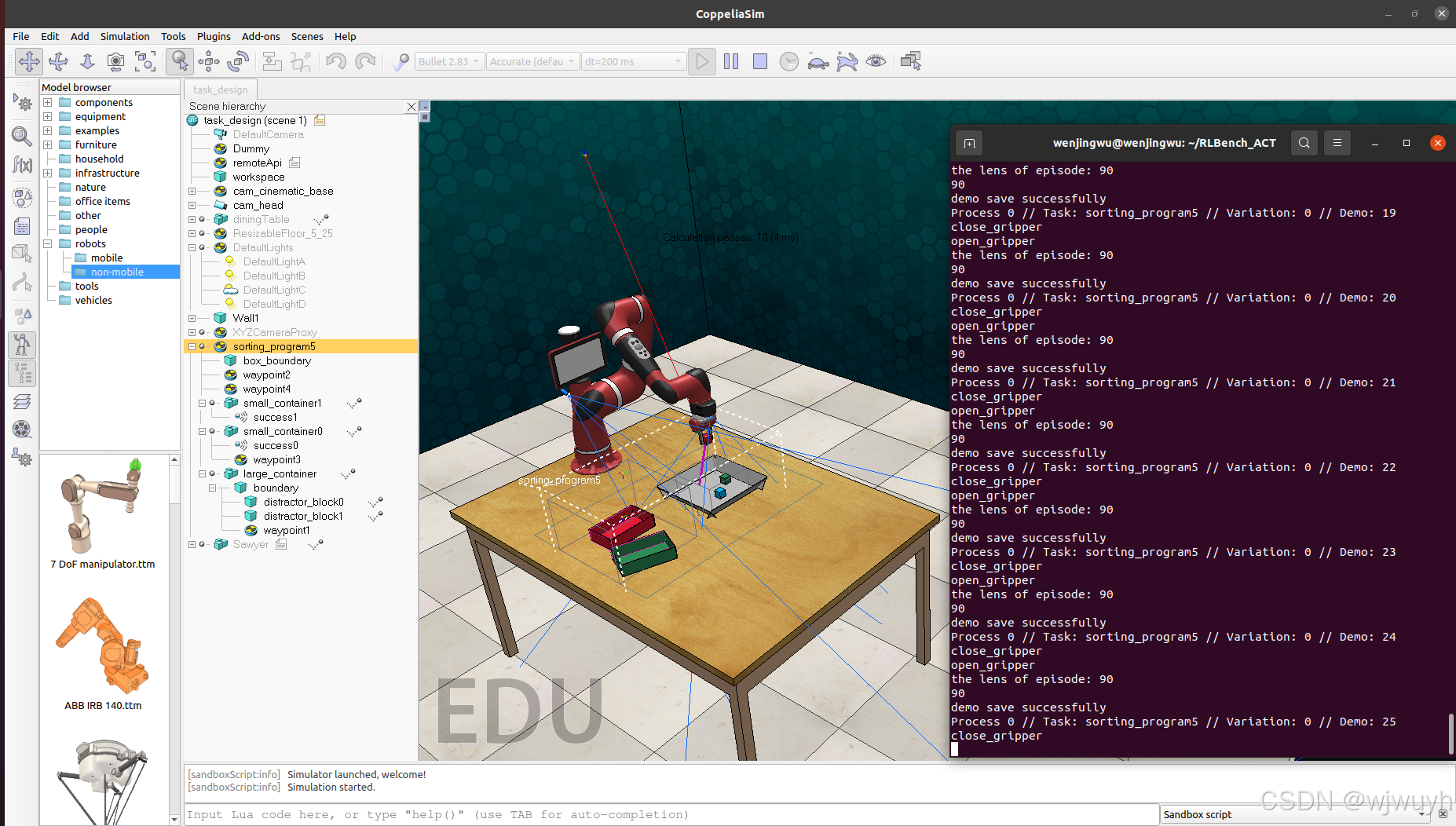
python3 RLBench/tools/dataset_generator_hdf5.py \
--save_path Datasets \
--robot sawyer \
--tasks sorting_program5 \
--variations 1 \
--episodes_per_task 50 \
--onscreen_render=True
qt.qpa.plugin: Could not find the Qt platform plugin "xcb" in "/home/wenjingwu/COPPELIASIM"
This application failed to start because no Qt platform plugin could be initialized. Reinstalling the application may fix this problem.
发现这个路径不对/home/wenjingwu/COPPELIASIM ,于是创建一个软连接
ln -s /home/your_name/CoppeliaSim /home/your_name/COPPELIASIM
成功解决

















 2003
2003

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









