







 本文详细介绍了HC-SR04超声波传感器的工作原理,包括信号发送控制、接收控制以及测量距离的方法。并提供了使用51单片机(如STC15F2K60S)进行编程的示例,展示了如何通过定时器计算回波时间来确定距离。
本文详细介绍了HC-SR04超声波传感器的工作原理,包括信号发送控制、接收控制以及测量距离的方法。并提供了使用51单片机(如STC15F2K60S)进行编程的示例,展示了如何通过定时器计算回波时间来确定距离。
一,引脚定义与工作特性
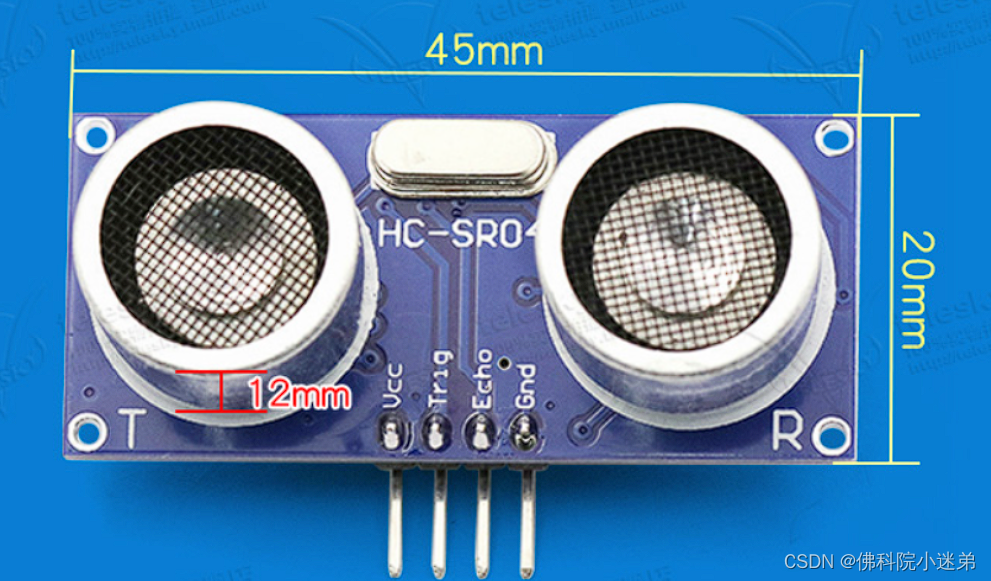
VCC:电源电压3.3V-5V
Trig:信号发送控制引脚
Echo:信号接收控制引脚
GND:电源地、电源负
测量距离:2cm-400cm(3.3v)、2cm-450cm(5V)
探测角度:<15°
工作温度:-20℃~80℃
二,工作原理与驱动方式
工作原理:
超声波的工作原理很简单,就是声音遇到障碍物会反弹,我们只需要计算超声波从发送到反弹回来的时间间隔,就可以根据速度与位移的公式,计算距离。
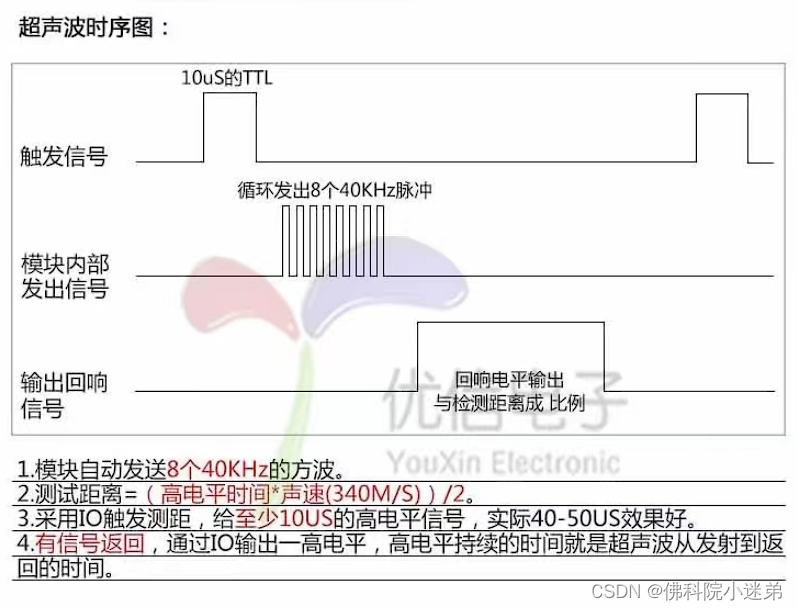
时序分析:
Trig置高电平至少10us之后置低电平,成功激活之后,发送探头会向外发送40kHz的超声波
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 4846
4846

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









