







 基于图像的人数统计涉及模式识别,包括视频捕获、目标提取、目标识别、目标跟踪和轨迹分析等步骤。OpenCV库提供了相关工具进行特征检测和分析。研究人员提出学习框架,通过估计连续密度函数来统计目标数量,实现较高精度。此外,还有人头检测方法和在线实时人物鉴定技术,这些都为安防等领域提供了有效解决方案。
基于图像的人数统计涉及模式识别,包括视频捕获、目标提取、目标识别、目标跟踪和轨迹分析等步骤。OpenCV库提供了相关工具进行特征检测和分析。研究人员提出学习框架,通过估计连续密度函数来统计目标数量,实现较高精度。此外,还有人头检测方法和在线实时人物鉴定技术,这些都为安防等领域提供了有效解决方案。
基于图像的人数统计属于模式识别问题,可应用于安防领域。传统的方法包括:1)视频捕获;2)目标提取(背景建模、前景分析)——常见方法有高斯背景建模、帧差法、三帧差法等;3)目标识别(模式识别、特征点分析),如人脸识别,头肩部识别等,OpenCV里可以使用Hear特征、级联分类器来进行特征检测;4)目标跟踪——基本方法有直方图特征匹配和运动目标连续性匹配,OpenCV里可以使用CamShift算法直接对彩色图像进行分析;5)轨迹分析——根据目标的运动轨迹计算目标目标运动方向和位移,判断目标是进入还是离开指定区域,从而对目标进行数目统计。具体可以参考OpenCV 视频人数统计研究
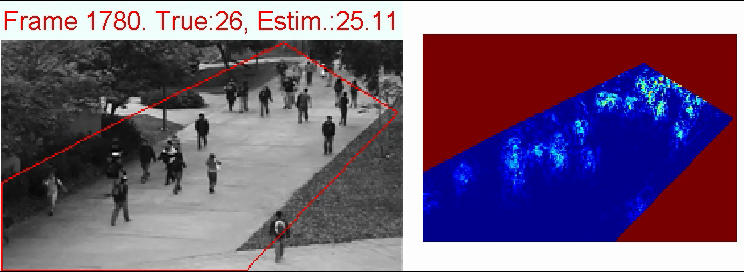
牛津大学Visual Geometry Group的Victor Lempitsky和Andrew Zisserman提出一种新的监督学习框架来完成视频中目标检测的任务,例如估计显微图像中的细胞数或视频监控中的人数统计。
他们不是检测和定位图像中的个体实例,而是估计一个连续的密度函数,然后对图像区域进行积分来统计此区域的目标数量。
他们的方法需要先对一些标注出目标的图像进行训练,然后就能处理类似的图像。从演示视频结果看,其误差小于3,已经比较精确。
项目提供了matlab代码下载,项目连接为:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 615
615

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









