






自动驾驶车道保持LKA,基于LQR算法,carsim与simulink联合仿真,包括说明书及LQR的推导过程(每一步怎么做的)
ID:2630678009782434
1232力
自动驾驶技术在近年来迅速发展,成为了汽车行业的热点话题。自动驾驶车道保持(Lane Keeping Assist,简称LKA)作为其中一个重要的功能,通过使用LQR(Linear Quadratic Regulator)算法实现,已成为自动驾驶系统的核心部分。本文将围绕LKA功能展开,阐述LQR算法的原理及其在车辆仿真中的应用。
首先,我们将对LQR算法进行详细的推导过程。LQR算法是一种线性二次型调节器,通过最小化系统状态误差和控制输入的二次型代价函数,实现对系统的优化控制。在LKA功能中,LQR算法被用于计算合适的转向角度,以使车辆在车道内保持稳定行驶。本文将逐步推导LQR算法的数学模型,并解释其背后的原理和工作原理。
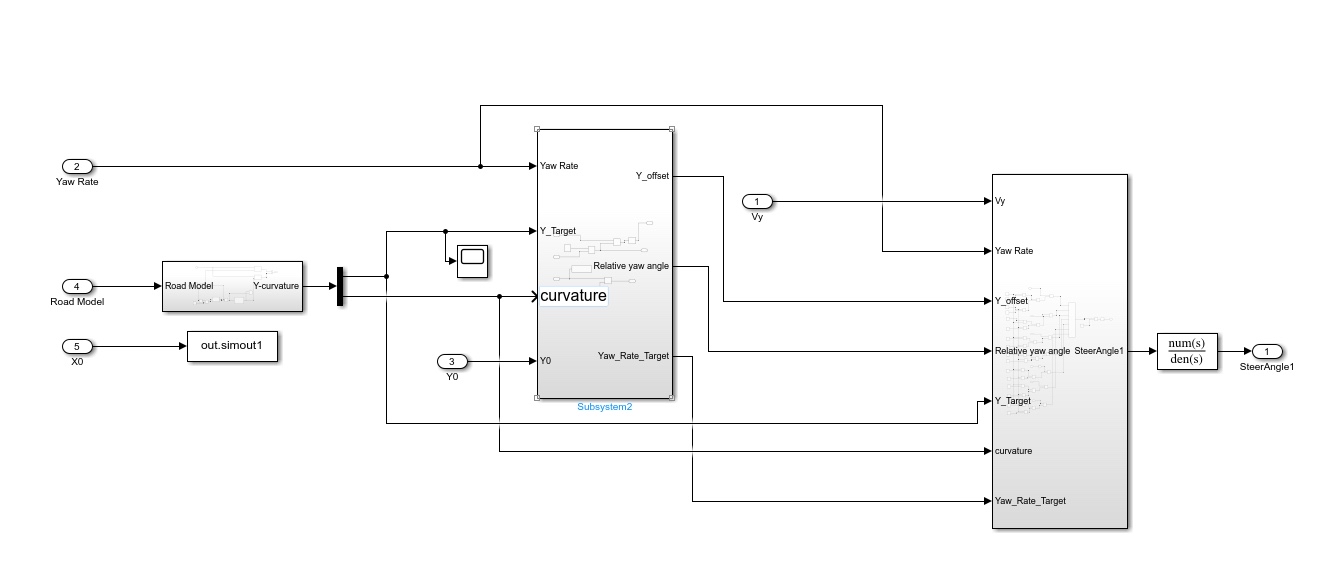
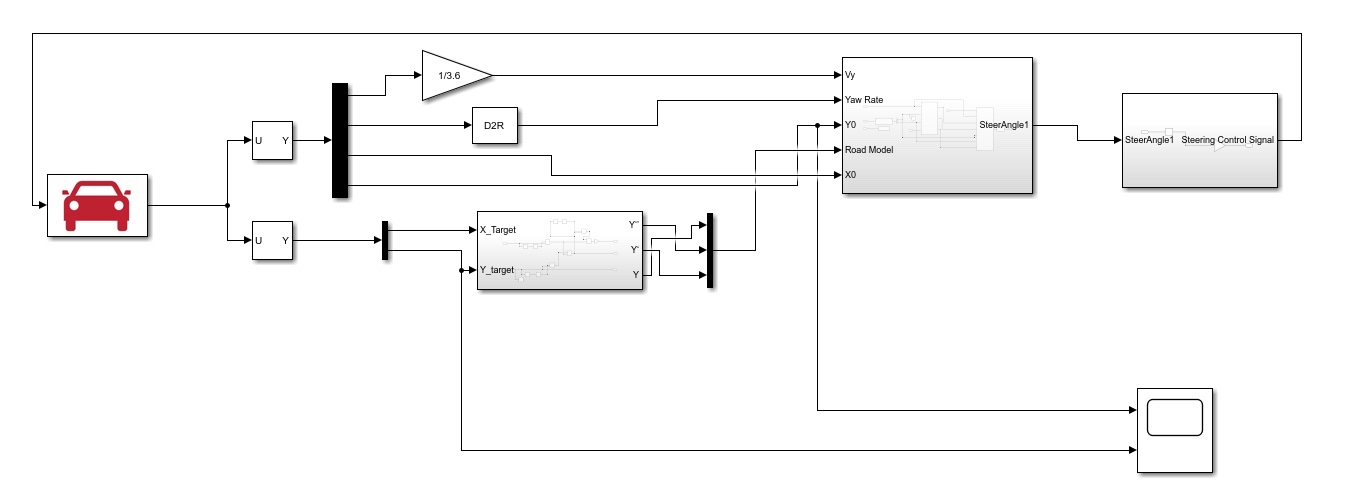
接下来,我们将介绍Carsim和Simulink这两个常用的仿真工具,并解释它们在自动驾驶车道保持中的应用。Carsim是一款用于车辆动力学仿真的软件,它能够准确模拟车辆在不同驾驶场景下的行为。Simulink则是一种基于图形化编程环境的仿真工具,可用于建模、仿真和验证复杂的控制系统。在本文中,我们将结合这两个工具,实现对LKA功能的联合仿真。我们将详细介绍仿真设置、参数调整和仿真结果分析的过程,并给出相应的仿真流程图和结果图表。
最后,本文将提供一份详细的说明书,包括LQR算法的推导过程以及Carsim与Simulink联合仿真的步骤说明。这份说明书将为开发人员提供必要的参考,帮助他们理解并实现自动驾驶车道保持功能。说明书将详细说明每一步骤的操作方法和参数设置,并提供相应的图表和结果分析,以便读者能够更好地掌握LKA功能和LQR算法的应用。
综上所述,本文围绕自动驾驶车道保持功能,基于LQR算法在Carsim与Simulink联合仿真中的应用展开详细阐述。通过推导LQR算法的数学模型、介绍仿真工具的使用方法以及提供详细的说明书,本文旨在帮助读者深入理解LKA功能和LQR算法的原理,并为开发人员提供实现该功能的指导和参考。通过本文的阅读,读者将能够全面了解自动驾驶车道保持技术的前沿进展,并为未来自动驾驶系统的研发和应用做出贡献。
相关的代码,程序地址如下:http://matup.cn/678009782434.html
















 1506
1506

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









