






自动驾驶,carsim,simulink联合仿真,基于lqr算法的路径跟踪控制,
carsim2019,matlab2018,以上。
ID:8325703803692963
规控算法工程师
自动驾驶技术是近年来备受关注的热门话题之一,它的兴起不仅改变着我们对汽车的认知,更是对交通运输领域产生了深远的影响。为了确保自动驾驶的安全和可靠性,车辆的路径跟踪控制是其中至关重要的一部分。而为了实现车辆路径的精确控制,Carsim和Simulink的联合仿真在路径跟踪控制中发挥着重要作用。本文将结合LQR算法,对基于Carsim2019和Matlab2018的自动驾驶路径跟踪控制进行深入分析。
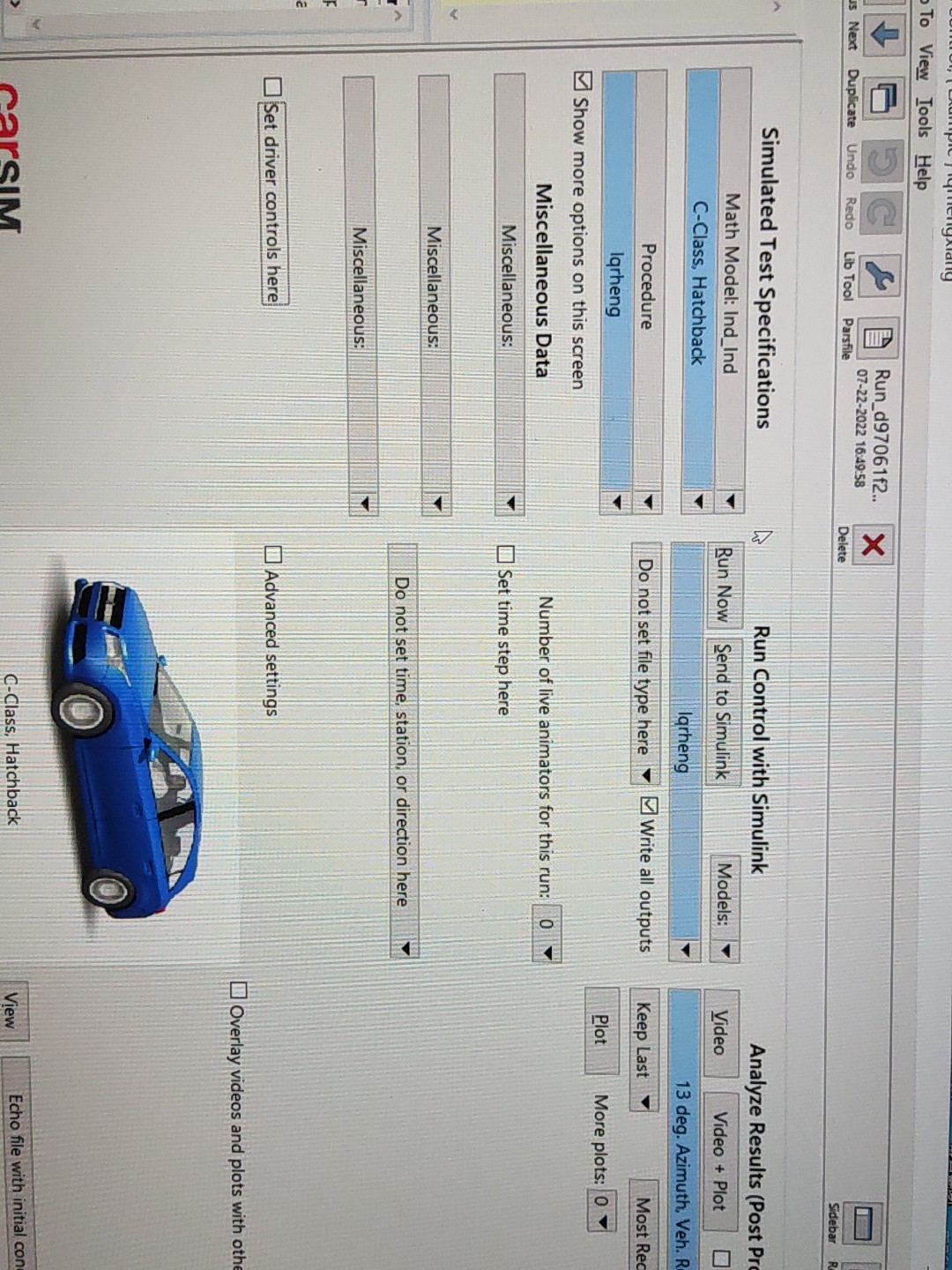
首先,我们需要了解Carsim和Simulink的基本概念。Carsim是一种用于汽车动力学仿真的软件工具,通过模拟车辆在不同道路和驾驶条件下的行为,对车辆的操控性能进行评估和优化。而Simulink则是Matlab软件中的一个功能强大的仿真环境,可以灵活地建立和调试各种控制系统模型。
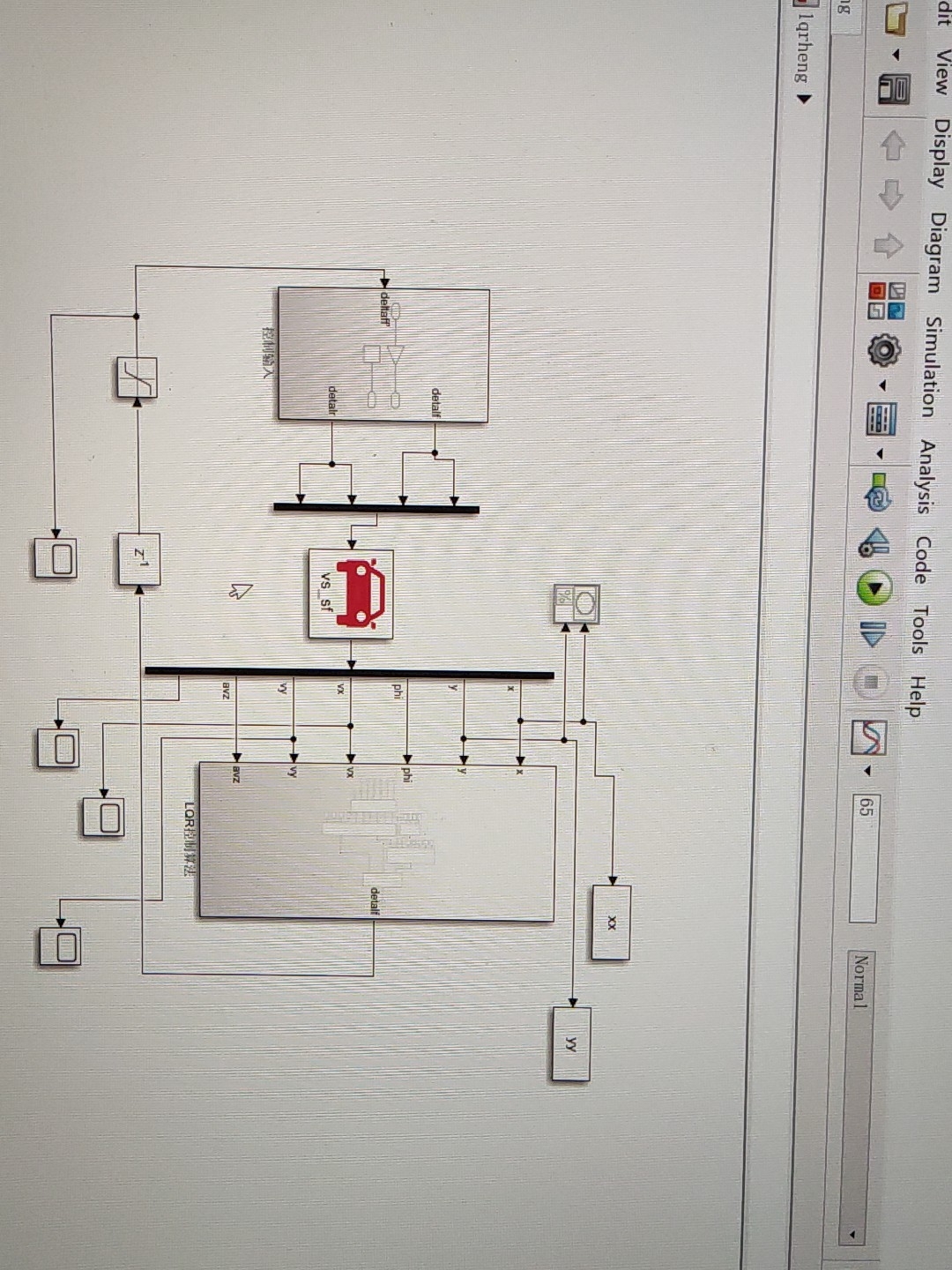
在自动驾驶路径跟踪控制中,LQR算法是一种常用且有效的控制策略。LQR算法基于线性二次调节器的思想,在给定车辆模型和目标路径的条件下,通过调整控制器参数,使车辆能够按照期望轨迹进行精确控制。
具体而言,基于Carsim2019和Matlab2018的自动驾驶路径跟踪控制可以分为以下几个关键步骤。首先,我们需要建立车辆的动力学模型,在Carsim中进行参数设定和模型建立。接下来,通过Simulink将车辆动力学模型与LQR控制器进行耦合,建立路径跟踪控制系统模型。然后,根据目标路径的设定,通过LQR算法对控制器进行参数调整,以达到路径跟踪的精确控制效果。最后,通过联合仿真,对路径跟踪控制系统进行评估和优化。
在实际应用中,基于Carsim和Simulink的自动驾驶路径跟踪控制可以应用于多种场景,例如高速公路驾驶、城市道路行驶等。通过对车辆动力学模型的精确建模和LQR控制器的优化调整,可以使车辆在各种驾驶环境下实现精确的路径跟踪,提高行驶安全性和舒适性。
总结起来,基于Carsim2019和Matlab2018的自动驾驶路径跟踪控制是一项复杂而重要的技术,通过联合仿真、LQR算法和车辆动力学模型的建立,实现车辆对目标路径的精确控制。这项技术的应用前景广阔,对于实现自动驾驶的安全和可靠性具有重要意义。未来,随着科技的不断进步和算法的不断优化,我们有理由相信自动驾驶路径跟踪控制技术将迎来更大的突破和发展。
【相关代码,程序地址】:http://fansik.cn/703803692963.html
















 837
837

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









