






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
⛳️赠与读者
👨💻做科研,涉及到一个深在的思想系统,需要科研者逻辑缜密,踏实认真,但是不能只是努力,很多时候借力比努力更重要,然后还要有仰望星空的创新点和启发点。建议读者按目录次序逐一浏览,免得骤然跌入幽暗的迷宫找不到来时的路,它不足为你揭示全部问题的答案,但若能解答你胸中升起的一朵朵疑云,也未尝不会酿成晚霞斑斓的别一番景致,万一它给你带来了一场精神世界的苦雨,那就借机洗刷一下原来存放在那儿的“躺平”上的尘埃吧。
或许,雨过云收,神驰的天地更清朗.......🔎🔎🔎
💥1 概述
管状折纸柔性运动链的算法设计研究
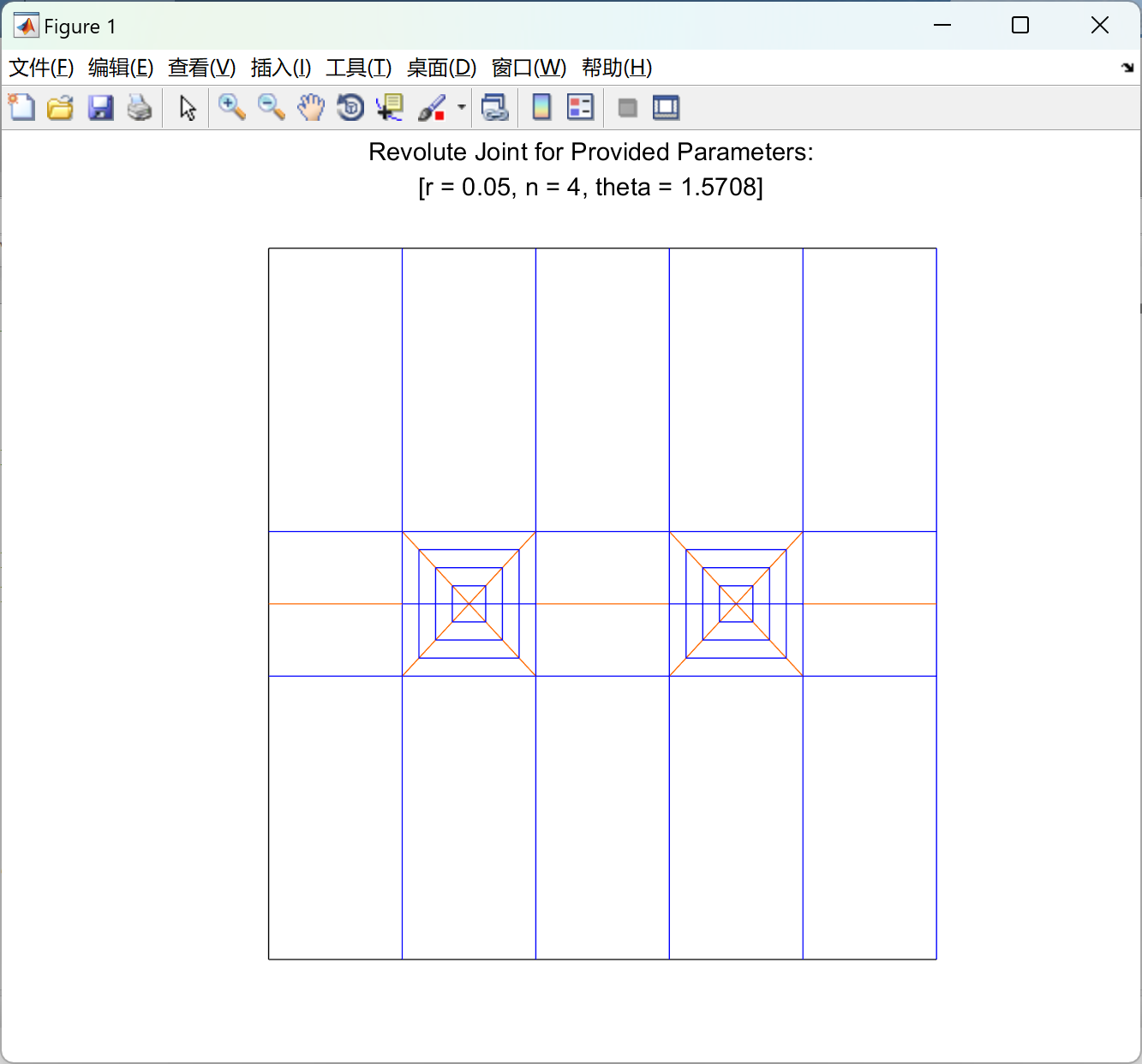
给定一个运动链机器人的Denavit-Hartenberg(D-H)规范,该程序生成一个折痕图案,该图案折叠成一个具有柔性关节的运动学等效机器人。该程序采用D-H规范,将相应的关节分配到离其他关节足够远的位置,同时保持相同的运动学特性。然后,受Dubin路径方法的启发,创建了一个折纸链接,将每两个连续的关节连接起来。
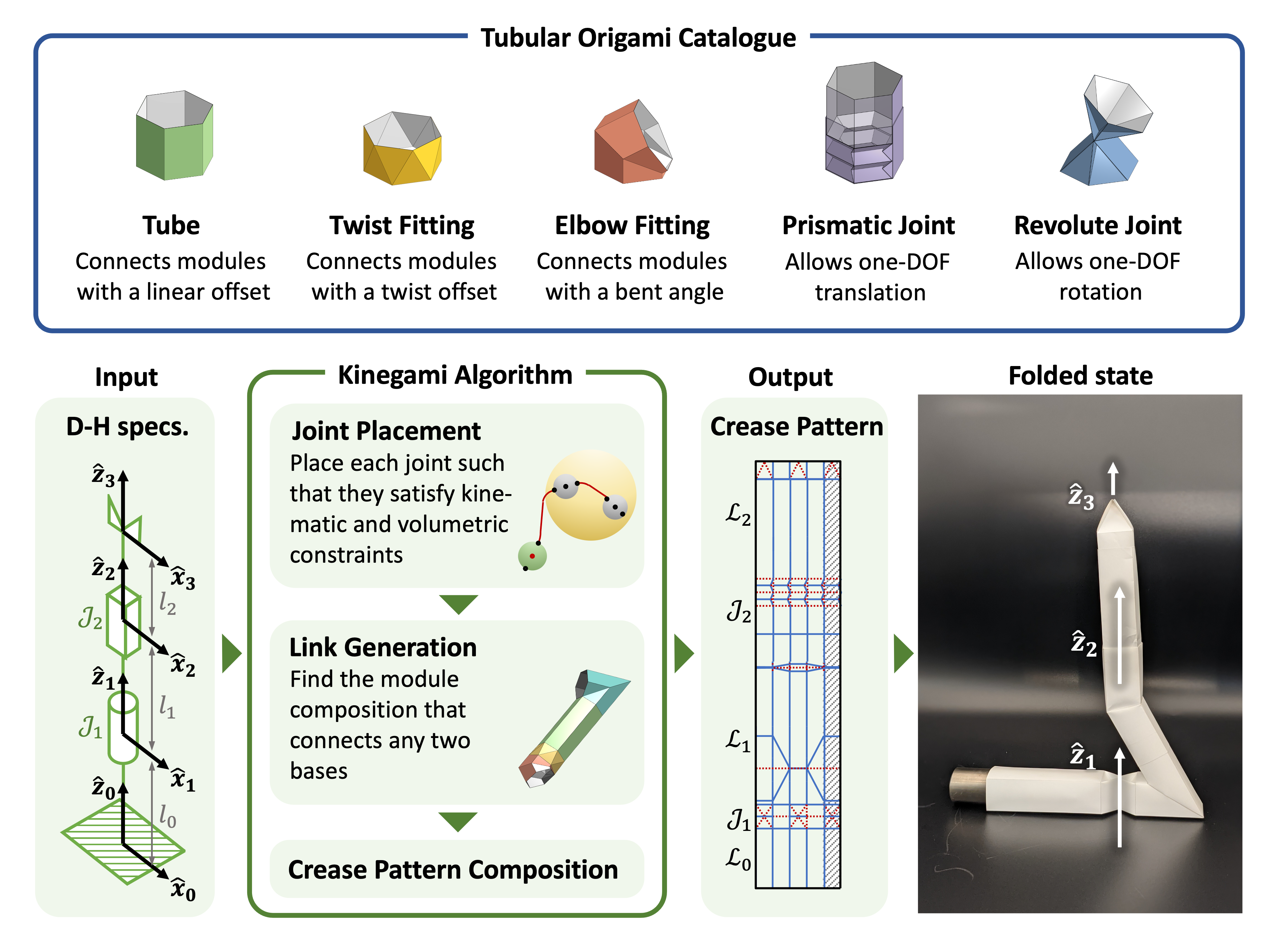
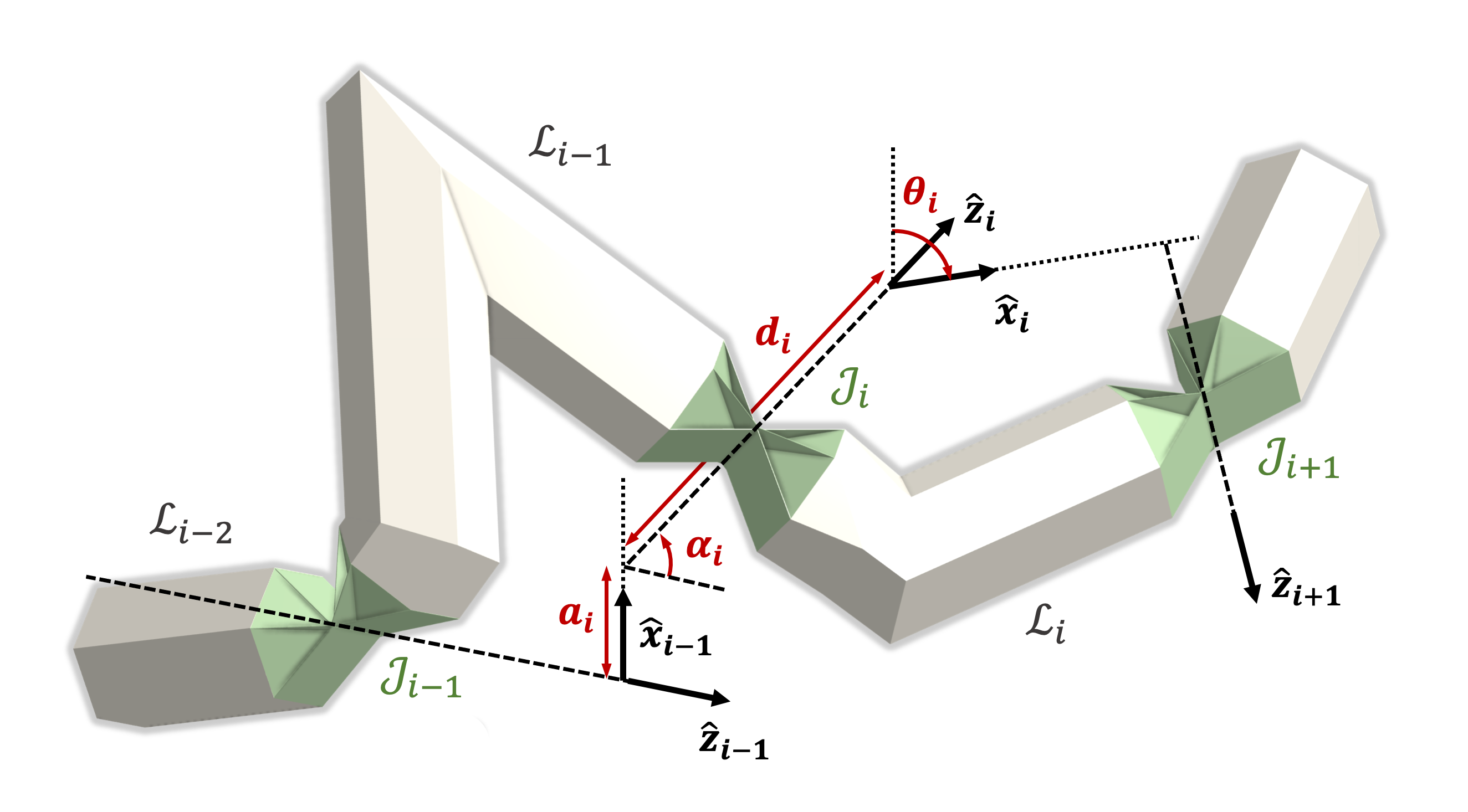
要构建D-H规范,请按照以下运动链机构示意图的变量定义(“连杆长度(a)”、“连杆扭转(α)”、“关节偏移(d)”和“关节角度(θ)”)和编号系统(有关更多详细信息,请阅读“W. Khal Khalil和E. Dombre,机器人的建模、识别和控制”)形成一个表格。
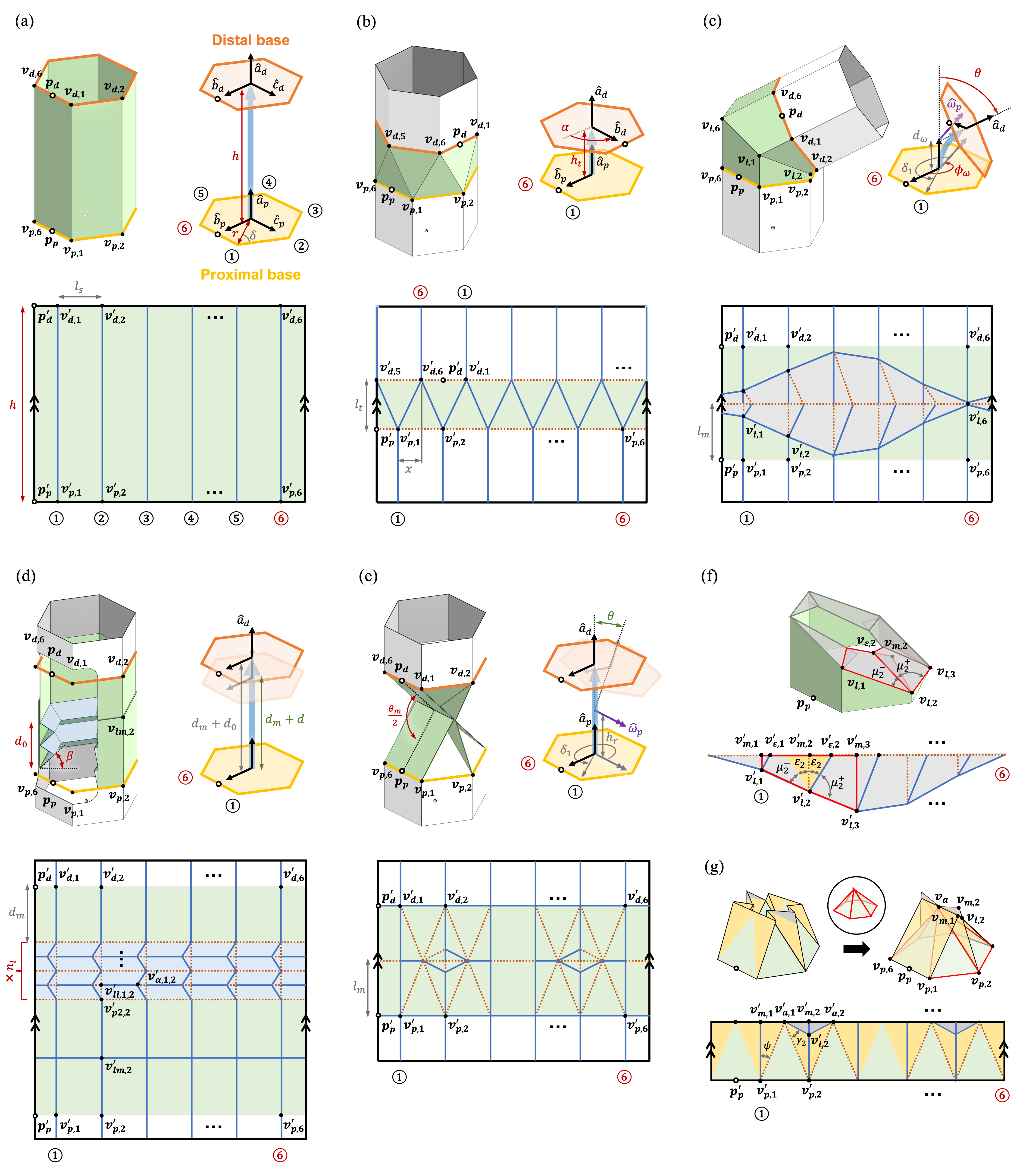
我们的Kinegami算法招募了一个参数化模块目录。折纸模块的折叠状态、其空间算子表示及其折痕模式如下所示:(a)折纸棱镜管,(b)扭曲配件,(c)弯管配件,(d)棱镜接头,(e)旋转接头,(f)弯管配件的部分特写和(g)旋转接头的部分特写。
此外,它还提供了自动选择相关模块(具有控制其合规性的设计参数)并将其组合成非自交单片模式的额外贡献,从而将设计问题简化为抽象规范之一。由此产生的管道不需要超出D-H规范的额外人工输入。然而,其算法步骤足够透明,以便于集成设计者的替代模块或在需要时进行更适当的优化组合。
📚2 运行结果
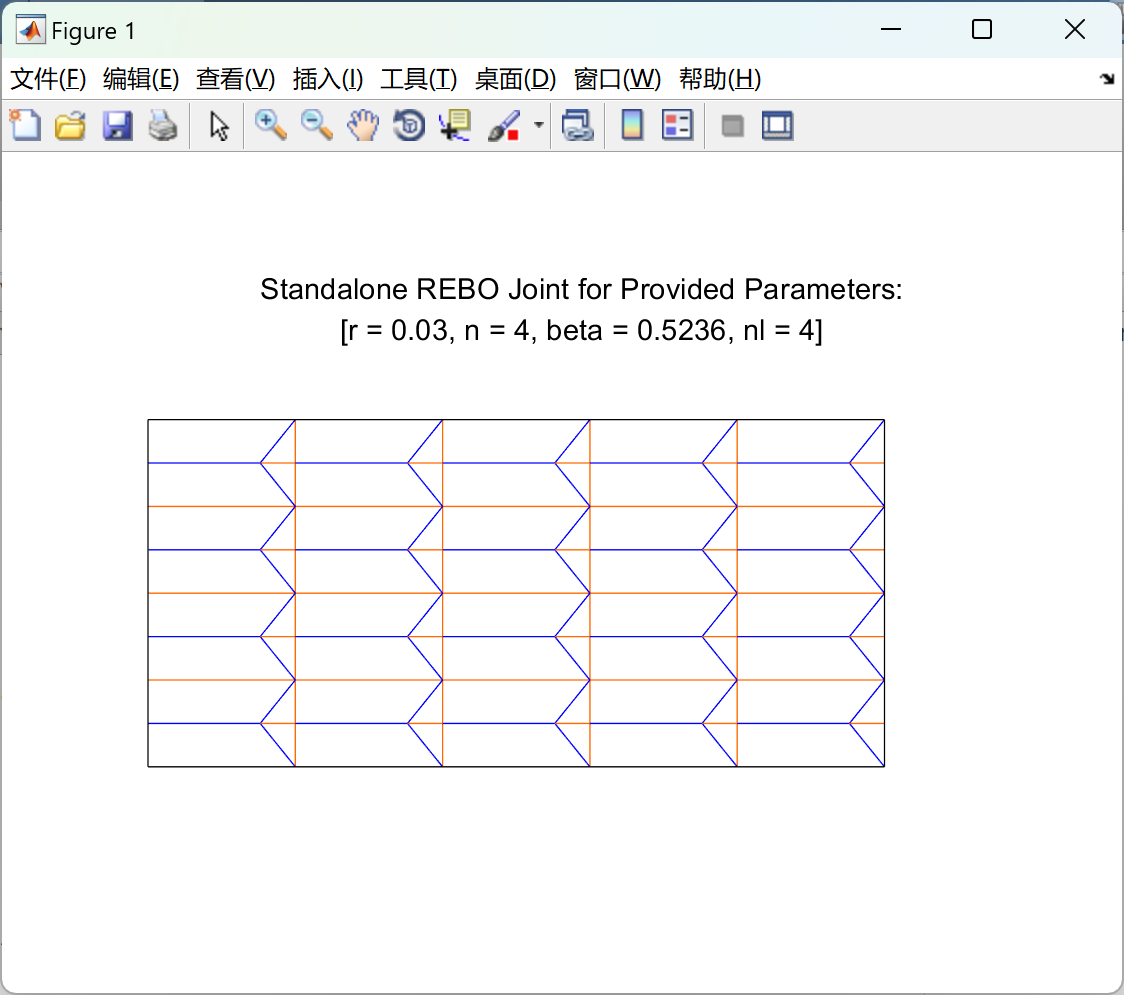
部分代码:
% Add all the folders and subfolders to the search path
addpath(genpath(fileparts(mfilename('fullpath'))));
% Specify inputs
r = 0.02; %[m]
n = 4;
% Outputs ls, which will be used in graphing the default fold
[ls] = Origami_Tube_Parameters(r, n);
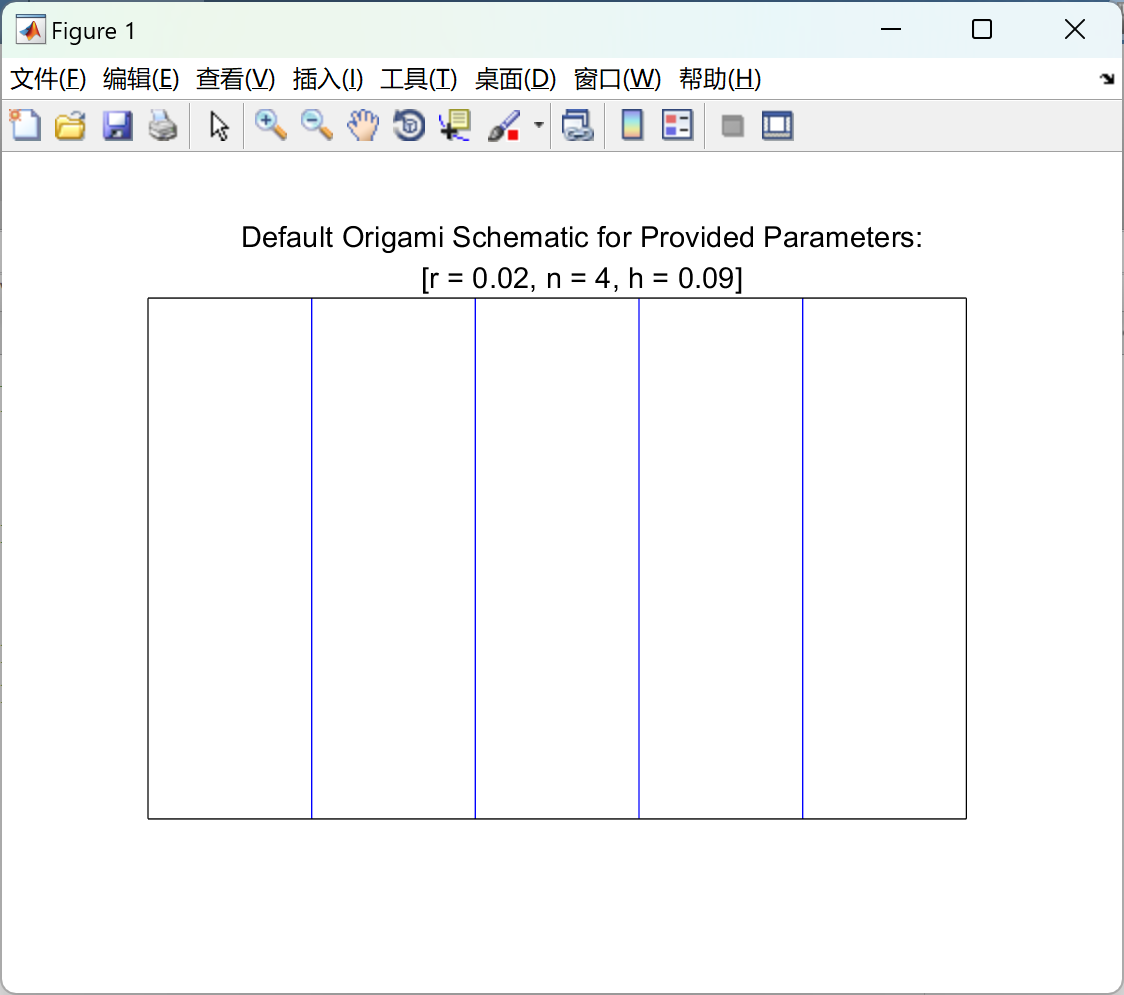
% Create a figure that demonstrates the crease schematic
% Specify value for h, the height of the tube section
h = 0.09; %[m]
% Outputs graphing for default tube
[dataFoldDefault, m, lmax] = Origami_Tube_CreasePattern(n, ls, h);
% Create Duplication for Overlap Slide
[dataFoldNew] = StandaloneDuplication(dataFoldDefault, ls, n, lmax, 'tube', h);
% Plotting
figure()
hold on
for i = 1:size(dataFoldNew, 2)
plot(dataFoldNew(i).x, dataFoldNew(i).y, 'color', dataFoldNew(i).color)
end
% Label the plot for clarity
title({
('Default Origami Schematic for Provided Parameters:')
['[r = ' num2str(r) ', n = ' num2str(n) ', h = ' num2str(h) ']']
})
daspect([1 1 1])
axis off
set(gcf, 'color', 'w')
% Convert to DXF
filename = (['Tube_r' num2str(r) '_n' num2str(n) '_h' num2str(h) ...
'.dxf']);
GenerateDXF(filename, dataFoldNew)
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。(文章内容仅供参考,具体效果以运行结果为准)
[1]张克涛,方跃法,郭盛.新型3自由度并联机构的设计与分析[J].机械工程学报, 2009, 45(1):5.
[2]贾广鲁,李兵,戴建生.变胞折块机构:圆柱体/圆锥体切割链接而成的变胞折块机构设计与运动学分析[J].机械工程学报, 2023, 59(13):24-35.
🌈4 Matlab代码实现
资料获取,更多粉丝福利,MATLAB|Simulink|Python资源获取



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









