






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
⛳️赠与读者
👨💻做科研,涉及到一个深在的思想系统,需要科研者逻辑缜密,踏实认真,但是不能只是努力,很多时候借力比努力更重要,然后还要有仰望星空的创新点和启发点。建议读者按目录次序逐一浏览,免得骤然跌入幽暗的迷宫找不到来时的路,它不足为你揭示全部问题的答案,但若能解答你胸中升起的一朵朵疑云,也未尝不会酿成晚霞斑斓的别一番景致,万一它给你带来了一场精神世界的苦雨,那就借机洗刷一下原来存放在那儿的“躺平”上的尘埃吧。
或许,雨过云收,神驰的天地更清朗.......🔎🔎🔎
💥1 概述
**摘要**:本文研究了线性多智能体系统的分布式H₂次优领航-跟随一致性控制问题,采用动态输出反馈方法。考虑到一个自主领航者、多个跟随者以及相关的H₂代价函数,我们的目标是设计一个分布式协议,以确保在领航-跟随一致性达成的同时,相关的H₂代价小于预先给定的上界。为此,我们首先证明了H₂次优领航-跟随一致性控制问题可以等价地转化为一组独立系统的H₂次优控制问题。基于此,我们提出了一种计算分布式协议的设计方法。反馈增益的计算涉及两个黎卡提不等式,其维度与智能体的状态维度相匹配。通过一个仿真例子展示了所提协议的性能。
**关键词**:分布式控制、H₂最优控制、、次优控制、领航-跟随系统。
**1. 引言**
近二十年来,由于多智能体网络的潜在应用范围广泛,分布式控制的研究兴趣显著增加。研究了多种分布式控制场景,包括一致性(Olfati-Saber和Murray,2004)、围堵控制(Li等,2013)和编队控制(Oh等,2015)。作为多智能体系统的基本研究问题之一,一致性控制可以根据是否存在领导者分为无领导者一致性(Li等,2009)和领航-跟随一致性(Ni和Cheng,2010)。
本文研究领航-跟随一致性控制,即跟随者的状态应跟随领航者的状态。文献中已经研究了单积分器智能体系统的领航-跟随一致性控制,包括无向图(Jadbabaie等,2003)和有向图(Ren和Beard,2005),二阶跟随者智能体系统具有切换拓扑结构(Hong等,2008),一般线性系统在切换交互拓扑下(Ni和Cheng,2010)以及有向固定拓扑下(Li和Duan,2017)。
在实际中,智能体动态受到外部干扰的影响,可能导致多智能体系统性能恶化。在文献中,许多研究致力于解决领航-跟随一致性问题中的H∞性能保证。对于线性多智能体系统,Liu等(2015)通过考虑H∞性能区域,研究了基于静态状态反馈的领航-跟随一致性控制。与考虑性能区域不同,Zhang等(2017)研究了在切换连通拓扑下线性离散时间多智能体系统的领航-跟随一致性问题,采用静态状态协议实现规定的H∞性能衰减水平。与仅考虑系统理论概念不同,Pirani等(2019)提出了一种基于静态状态协议的图论方法,用于研究领航跟随一致性动态的H∞性能。然而,上述研究集中在H∞性能指标上,该指标衡量系统在最坏情况下的抗干扰能力。此外,上述研究考虑了静态状态反馈情况,而在实际中,通常只有智能体的输出测量值可用。
与此同时,也有研究关注无领导者多智能体系统的H₂性能,其中H₂性能指标表示系统在外部干扰下的误差能量。Li等(2011)研究了无向图下的无领导者一致性问题,考虑了H₂性能区域;Wang等(2014)研究了有向通信图下的H₂性能指标保证。与考虑性能区域不同,Jiao等(2018)基于静态状态反馈建立了次优分布式协议,Jiao等(2020)基于动态输出反馈建立了次优分布式协议,以最小化给定的H₂代价准则,同时实现多智能体系统的一致性。然而,在分布式H₂控制的背景下,对有领导者的领航-跟随一致性研究较少。
受上述研究的启发,本文研究基于动态输出反馈的领航-跟随多智能体系统的分布式H₂控制问题。具体而言,本文将Jiao等(2020)中无领导者系统的结果扩展到领航-跟随情况。为此,对于给定的领航-跟随系统,我们首先引入一个合适的性能输出,随后引入一个相关的H₂代价函数。目标是通过动态输出反馈设计分布式协议,使多智能体系统在最小化相关H₂代价函数的同时实现领航-跟随一致性。由于智能体之间的通信限制,这一问题是非凸的,迄今为止,文献中尚未给出封闭形式的解。因此,我们寻求一种仅涉及次优性的替代方案。
本文的结构如下:第2节介绍一些符号和图论基础知识。第3节阐述H₂次优领航-跟随一致性问题。第4节设计分布式H₂次优协议。第5节通过仿真例子展示所提协议的性能,第6节总结全文。
**6. 结论**
本文研究了基于动态输出反馈的分布式H₂次优领航-跟随一致性控制问题。对于一个包含N个智能体的多智能体系统,其中包含一个自主领航者和N−1个跟随者,以及一个具有期望上界的H₂代价函数,我们提出了一种计算分布式协议的设计方法,以实现H₂次优领航-跟随一致性。也就是说,跟随者的状态收敛到领航者状态,并且相关的H₂代价小于给定的上界。
详细文章见第4部分。
📚2 运行结果
可视化部分代码:
figure4 = figure;
figure4.Position = [50 50 550 505];
ax(1)=subplot(2,1,1);
hold on
grid on
plot(T,x11(:,1)','LineWidth',2)
plot(T,x11(:,2)',':','LineWidth',1.5)
plot(T,x11(:,3)',':','LineWidth',1.5)
plot(T,x11(:,4)',':','LineWidth',1.5)
plot(T,x11(:,5)',':','LineWidth',1.5)
plot(T,x11(:,6)',':','LineWidth',1.5)
plot(T,x11(:,7)',':','LineWidth',1.5)
hold off
legend('x_{11}','x_{21}','x_{31}','x_{41}','x_{51}','x_{61}','x_{71}','Orientation','horizontal','Location','northoutside')
xlabel('Time(sec)')
ylim([-20 25])
ax(2)=subplot(2,1,2);
hold on
grid on
plot(T,x12(:,1)','LineWidth',2)
plot(T,x12(:,2)',':','LineWidth',1.5)
plot(T,x12(:,3)',':','LineWidth',1.5)
plot(T,x12(:,4)',':','LineWidth',1.5)
plot(T,x12(:,5)',':','LineWidth',1.5)
plot(T,x12(:,6)',':','LineWidth',1.5)
plot(T,x12(:,7)',':','LineWidth',1.5)
legend('x_{12}','x_{22}','x_{32}','x_{42}','x_{52}','x_{62}','x_{72}','Orientation','horizontal','Location','northoutside')
xlabel('Time(sec)')
ylim([-20 30])
MagInset(figure4, ax(1), [30 60 10 15], [15 45 -13 2], {'NE','SE';'SW','NW'});
MagInset(figure4, ax(2), [30 60 10 15], [15 45 -13 2], {'NE','SE';'SW','NW'});
hold off
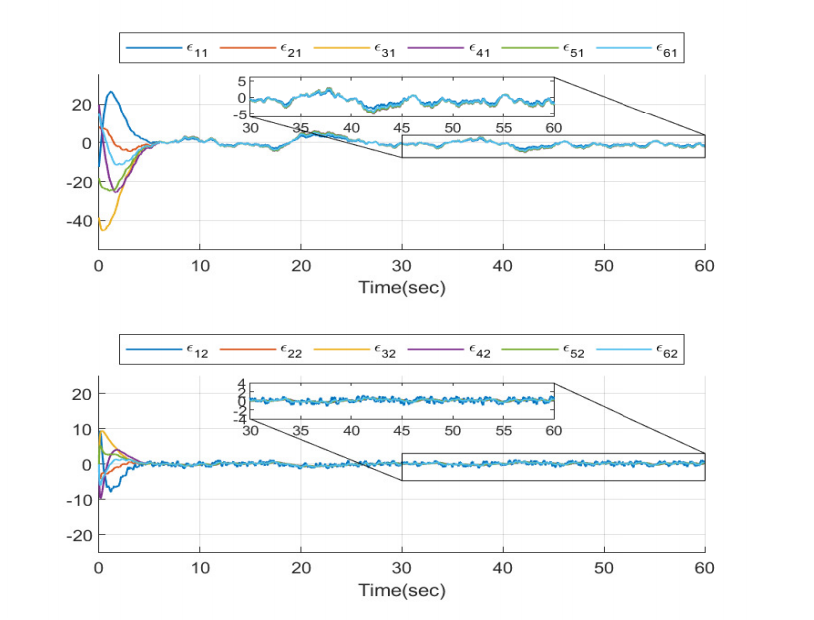
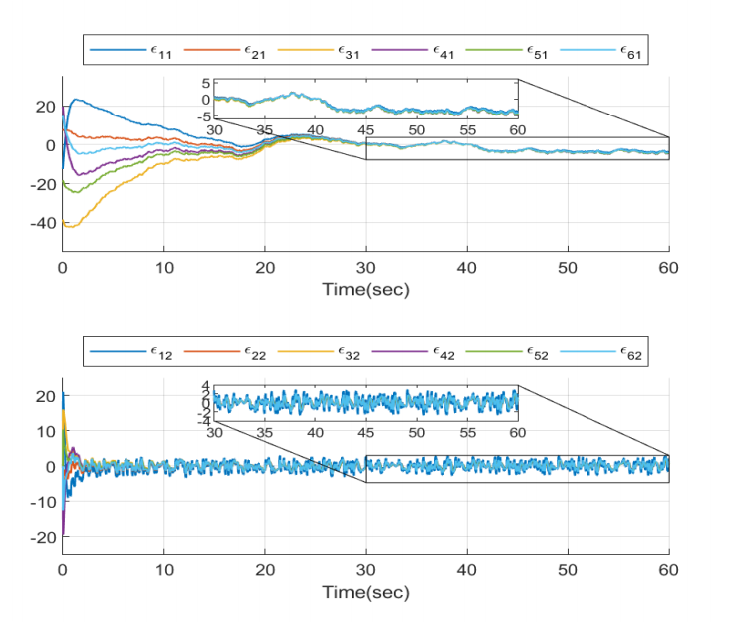
figure5 = figure;
figure5.Position = [50 50 550 520];
ax(1)=subplot(2,1,1);
hold on
grid on
plot(T,ep1(:,1)','LineWidth',1)
plot(T,ep1(:,2)','LineWidth',1)
plot(T,ep1(:,3)','LineWidth',1)
plot(T,ep1(:,4)','LineWidth',1)
plot(T,ep1(:,5)','LineWidth',1)
plot(T,ep1(:,6)','LineWidth',1)
hold off
legend('\epsilon_{11}','\epsilon_{21}','\epsilon_{31}','\epsilon_{41}','\epsilon_{51}','\epsilon_{61}','Orientation','horizontal','Location','northoutside')
xlabel('Time(sec)')
ylim([-55 35])
ax(2)=subplot(2,1,2);
hold on
grid on
plot(T,ep2(:,1)','LineWidth',1)
plot(T,ep2(:,2)','LineWidth',1)
plot(T,ep2(:,3)','LineWidth',1)
plot(T,ep2(:,4)','LineWidth',1)
plot(T,ep2(:,5)','LineWidth',1)
plot(T,ep2(:,6)','LineWidth',1)
legend('\epsilon_{12}','\epsilon_{22}','\epsilon_{32}','\epsilon_{42}','\epsilon_{52}','\epsilon_{62}','Orientation','horizontal','Location','northoutside')
xlabel('Time(sec)')
ylim([-25 25])
MagInset(figure5, ax(1), [30 60 -6 6], [15 45 12 32], {'NE','NE';'SW','SW'});
MagInset(figure5, ax(2), [30 60 -4 4], [15 45 12 22], {'NE','NE';'SW','SW'});
hold off
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。(文章内容仅供参考,具体效果以运行结果为准)

🌈4 Matlab代码、Simulink仿真、文章
资料获取,更多粉丝福利,MATLAB|Simulink|Python资源获取



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









