






👨🎓个人主页
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
分布式港口-哈密顿系统(Port-Hamiltonian)鲁棒调控的李雅普诺夫方法研究
三、李雅普诺夫方法在分布式Port-Hamiltonian系统中的应用
四、分布式Port-Hamiltonian系统的鲁棒调控挑战
💥1 概述
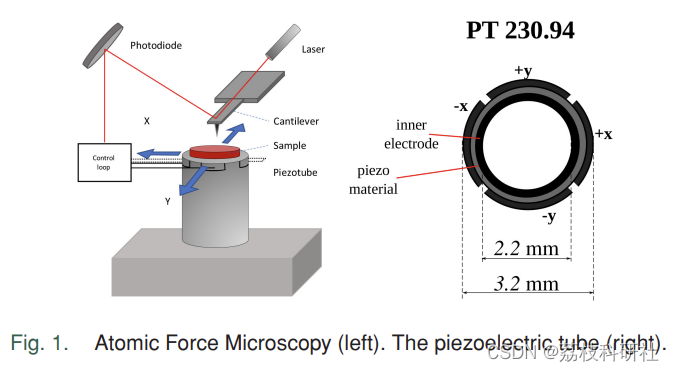
本文研究了边界控制的无限维波特-哈密顿系统的鲁棒输出跟踪和抗扰,包括欧拉-伯努利梁方程等二阶模型。控制设计采用内部模型原理,稳定性分析采用李雅普诺夫方法实现。与关于同一主题的现有工作相反,没有对所考虑的偏微分方程类的外部适定性做出假设。研究结果应用于原子力成像中使用的压电驱动管的鲁棒跟踪。
分布式港口-哈密顿系统(Port-Hamiltonian)鲁棒调控的李雅普诺夫方法研究
一、分布式港口-哈密顿系统的基本定义与特性
分布式港口-哈密顿系统(Distributed-Parameter Port-Hamiltonian Systems, DPHS)是一种基于能量守恒和几何结构的建模框架,适用于描述具有空间分布特性的物理系统(如振动弦、传输线、电磁场等)。其核心要素包括:
- 斯托克斯-迪拉克结构(Stokes-Dirac Structure) :定义了系统内部能量流的分布与守恒关系,通过边界端口(Boundary Ports)实现能量输入/输出[2][5]。该结构在弱形式下可通过混合Galerkin离散化方法进行有限维近似,保留原系统的几何特性[2]。
- 哈密顿密度与能量函数:系统总能量由哈密顿密度在空间域上的积分表示,例如对于机械系统,哈密顿函数包含动能和势能[5]。
- 互连与耗散机制:由J(互连矩阵)和R(耗散矩阵)分别描述能量守恒的拓扑结构和能量损失特性[3][1]。例如,J的斜对称性保证能量守恒,而R的半正定性确保能量耗散[3]。
特性:
- 几何结构保持:离散化后仍保留原系统的Dirac结构和能量守恒特性[2]。
- 边界能量交换:通过边界端口实现与外部环境的能量交互,适用于分布式控制设计[5]。
- 多物理场耦合:支持机电、热流等复杂系统的统一建模[15]。
二、鲁棒调控的核心要求与实现方法
鲁棒控制的目标是确保系统在参数不确定性、外部扰动和建模误差下仍保持稳定性和性能。核心要求包括:
- 稳定性保证:所有不确定性条件下系统需满足Lyapunov稳定性或输入-输出稳定性[60][31]。
- 最小化敏感度:降低控制器对系统参数变化的敏感度,例如通过H∞控制抑制扰动传递[57][34]。
- 性能优化:在保证稳定性的同时优化动态响应,如快速跟踪、低超调[60]。
实现方法:
- H∞控制:通过最小化系统传递函数的H∞范数,实现最坏情况下的性能鲁棒性[57]。
- 结构奇异值(μ-synthesis) :处理结构化的不确定性,优化鲁棒稳定裕度[55]。
- 自适应控制:结合参数估计和反馈调节,应对时变不确定性[59]。
三、李雅普诺夫方法在分布式Port-Hamiltonian系统中的应用
李雅普诺夫方法通过构造能量类函数分析系统稳定性,尤其适用于非线性与分布式系统:
- 直接法:构造正定Lyapunov函数V(x)V(x),并验证其导数V˙(x)≤0V˙(x)≤0。例如,将系统哈密顿函数作为Lyapunov候选函数,结合耗散项证明稳定性[85][90]。
- 间接法:对线性化系统进行特征值分析,推断原系统的局部稳定性[66]。
在DPHS中的具体应用:
- 能量函数构造:以哈密顿函数H(x)H(x)为基础,结合耗散项设计Lyapunov函数,例如V(x)=H(x)+∫Zϕ(∂x) dzV(x)=H(x)+∫Zϕ(∂x)dz,其中ϕϕ为边界能量项[91]。
- 边界控制稳定性:针对无限维系统(如Euler-Bernoulli梁),通过边界控制输入设计Lyapunov函数,证明闭环系统的渐近稳定性[110][22]。
四、分布式Port-Hamiltonian系统的鲁棒调控挑战
- 无限维特性:分布式系统的状态空间为无限维,传统有限维控制方法(如状态反馈)难以直接应用,需通过空间离散化或模态截断[91]。
- 边界控制复杂性:能量输入/输出集中于边界(如梁的端点),导致控制作用受限,需结合内部模型原理(Internal Model Principle)实现鲁棒跟踪[110][22]。
- 模型不确定性:参数摄动(如材料刚度变化)和未建模动态需通过鲁棒自适应策略补偿[106]。
- 离散化误差:几何离散化方法(如Whitney有限元)可能引入数值耗散,破坏原系统的守恒特性[2]。
五、现有研究案例与进展
-
案例1:欧拉-伯努利梁的鲁棒跟踪
- 控制设计:采用内部模型原理设计边界控制器,结合Lyapunov方法证明跟踪误差的渐近收敛性[110][22]。
- Matlab实现:通过离散化参数(如长度分段数NN)构建互连矩阵JJ和能量矩阵QQ,仿真验证抗扰性能[22]。
-
案例2:随机Port-Hamiltonian系统的容错控制
- 方法:设计鲁棒自适应控制器,通过匹配条件(Matching Condition)补偿执行器故障,利用Itō公式分析随机稳定性[106]。
-
分布式能源系统优化
- 应用:在含风电的集成能源系统中,采用分布鲁棒机会约束规划(DRO)优化电解器和电锅炉的配置,平衡经济性与鲁棒性[98]。
六、未来研究方向
- 混合有限维-无限维系统:研究有限维控制器与无限维被控对象的互连稳定性,例如通过Casimir函数实现能量协调[91]。
- 数据驱动鲁棒控制:结合机器学习与Port-Hamiltonian框架,处理高维不确定性[59]。
- 多时间尺度问题:针对含快慢动态的系统(如热-力耦合),设计分层Lyapunov函数[90]。
结论
分布式Port-Hamiltonian系统为复杂物理系统建模提供了几何与能量视角,而李雅普诺夫方法在鲁棒调控中发挥了核心作用。当前研究已解决部分边界控制与自适应问题,但无限维系统的稳定性证明、高精度离散化方法及多物理场耦合控制仍需进一步探索。未来结合数据驱动技术与传统几何方法,有望推动该领域在机器人、能源系统等场景中的实际应用。
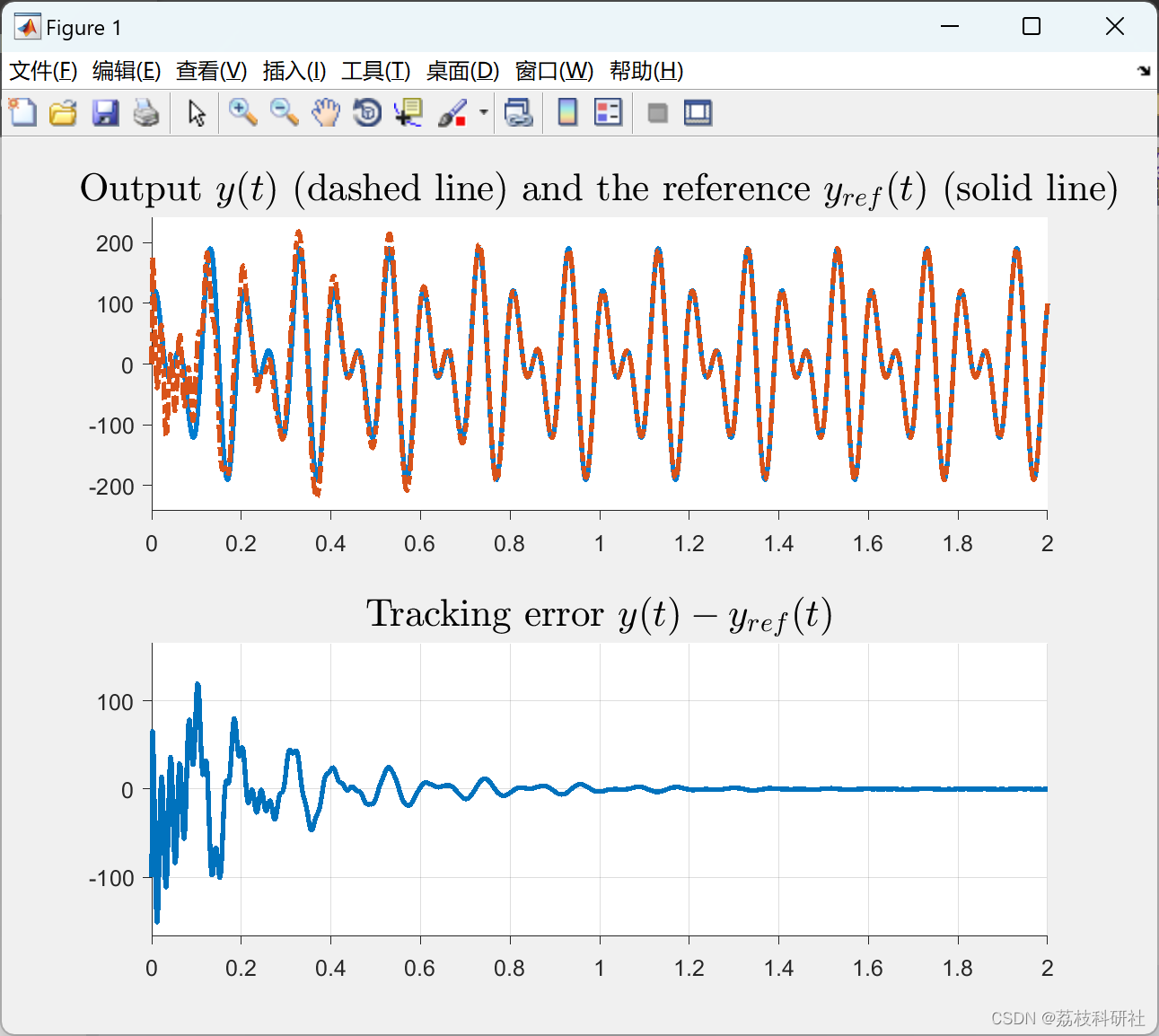
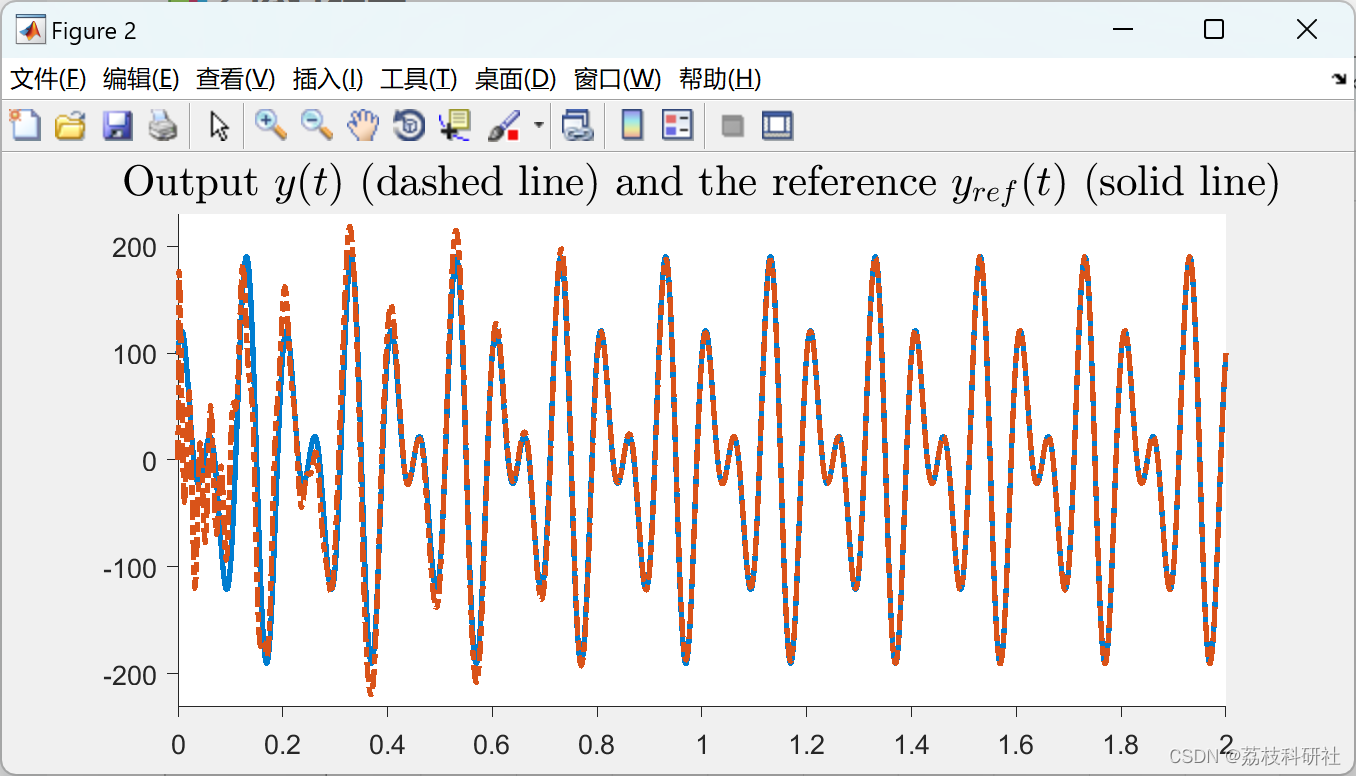
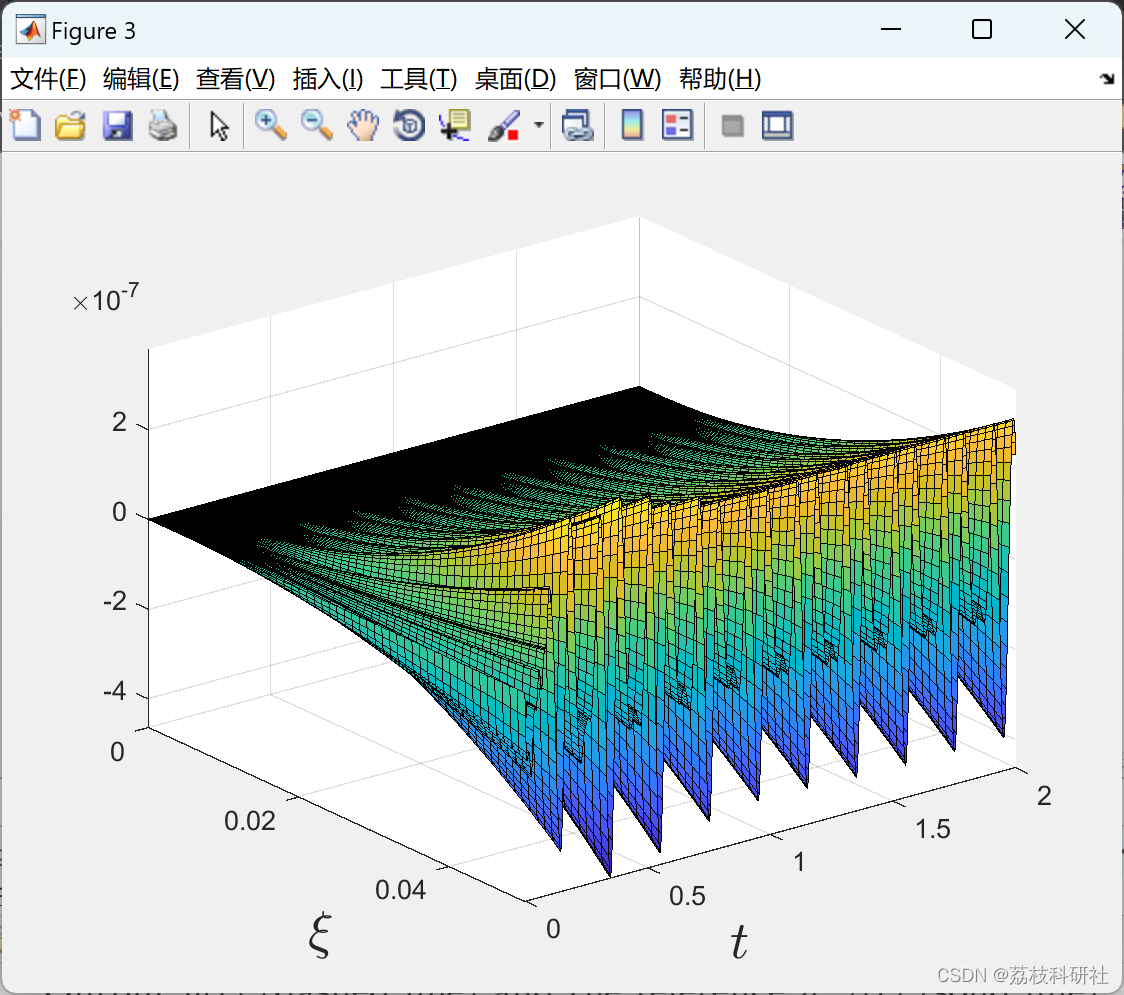
📚2 运行结果
部分代码:
% %%--Beam Parameters--%%
L = 0.05; % Lenght
La = 0.003; % Width
Ep = 0.002; % Thickness
As = La*Ep; % Trasversal section Surface
rho = 936; % Density
E = 4.14e+09; % Elastic modulus
Kp = E/(2*(1+0.46)); % Shear modulus
I = (Ep^3*La)/12; % Moment of inertia
Irho = I*rho;
EI = E*I;
rhoA = rho*As;
rt=1e-4; % Translational Dissipation
rr=1e-4; % Totational Dissipation
%%--Discretization parameters--%%
Lab = L/N;
spgrid = linspace(0,L,N+1);
%%--Discretized system parameters--%%
Rho_ab = rhoA*Lab;
Irho_ab = Irho*Lab;
Kp_ab = Kp/Lab;
EI_ab = EI/Lab;
%%--Matrices construction--%%
%--Interconnection matrix--%
Ji = zeros(N);
for k=1:N
for j=1:N
if k == j
Ji(k,j) = -2;
elseif j > k
Ji(k,j) = 0;
else
Ji(k,j) = 4*(-1)^(k+j-1);
end
end
end
S = zeros(N);
for k=1:N
for j=1:N
if k == j
S(k,j) = -Lab;
end
end
end
J=[zeros(N), Ji, zeros(N), S;
-Ji', zeros(N), zeros(N) , zeros(N);
zeros(N), zeros(N), zeros(N), Ji;
-S', zeros(N), -Ji', zeros(N)];
%--Energy Matrix--%
Q = zeros(4*N);
for i=1:4*N
for j=1:4*N
if i==j
if i<=N
Q(i,j)=Kp_ab;
elseif (i>N) && (i<=2*N)
Q(i,j)=1/Rho_ab;
elseif (i>2*N) && (i<=3*N)
Q(i,j)=EI_ab;
elseif (i>3*N) && (i<=4*N)
Q(i,j)= 1/Irho_ab;
end
end
end
end
%--Dissipation Matrix--%
Rt=zeros(N);
for i=1:N
for j=1:N
if i == j
Rt(i,j) = rt*Lab;
end
end
end
Rr=zeros(N);
for i=1:N
for j=1:N
if i == j
Rr(i,j) = rr*Lab;
end
end
end
R=[zeros(N,4*N); zeros(N), Rt, zeros(N,2*N); zeros(N,4*N); zeros(N,3*N), Rr];
%%--Dynamic System--%%
A=(J-R)*Q;
B = zeros(4*N, 1);
for j=3*N+1:4*N
B(j,1)=(-1)*(-0.5)^(j-1)/0.5^j;
end
C=B'*Q;
D = 0;
%%--System Definition--%%
Sys=struct;
Sys.A=A;
Sys.B=B;
Sys.Bd = B; % Input disturbance
Sys.C=C;
Sys.D=D;
Sys.Dd=D; % Input disturbance
% Initial state of the system (the zero initial state x0=0)
x0 = zeros(size(A,1),1);
🎉3 参考文献
部分理论来源于网络,如有侵权请联系删除。



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









